认知雷达对抗中的未知雷达状态识别方法分析
2020-02-21林石伍燕平肖进
林石 伍燕平 肖进
摘要:本文首先对认知雷达对抗进行了概述,并针对雷达设备对雷达信号进行识别,进而对干扰效果进行评估,提高干扰工作的针对性与主动性,不断优化干扰策略。
关键词:雷达对抗;SVM模型;识别方法
在雷达对抗系统运行过程中,干扰方会结合实际情况验证信息之后再对相关雷达信号的参数开展测量工作,合理优化干扰资源。在此过程中,经常会出现干扰方无法根据雷达状态、对抗环境等因素,合理调整自身干扰策略。在这种情况下,干扰方的对抗属于静止状态,干扰效率也难以提高。再加上新体制雷达的不断出现,在没有交互对抗时,雷达设备本身的诸多功能都是被隐藏的,无法充分发挥自身作用。认知雷达对抗系统的应用,有效改善了传统雷达对抗系统中的弊端,不断优化干扰信号,合理调度干扰资源,最终提高认知雷达对抗的针对性与主动性。
1 认知雷达对抗的相关概述
所谓的认知雷达对抗指代的是在将闭环行为学习过程引进到以往认知雷达对抗中,增强雷达设备对抗时干扰方的功能,使其可以在接收到相关雷达信息后立刻对相关参数以及状态开展测量、辨识工作,充分掌握不同雷达设备的不同状态,使得干扰信号的相关数据信息能够被全面收集、处理,最终帮助工作人员对雷达设备的干扰效果进行评估,合理配置雷达干扰资源,使得雷达对抗效果得以提升[1]。
在雷达对抗过程中,有关状态识别问题,本质上可以说是模式分类问题。在雷达状态识别过程中通常情况下可以分为无监督学习与监督学习两类。在开展有监督学习时,需要注意的是要对相关初始数据的相关样本进行标注,将标注后的数据作为训练样本,而后根据雷达设备本身的学习算法生成分类器,而后再通過算法最终生成分类器对没有标注的样本开展识别工作。针对于无监督工作而言,相关人员可以不用对样本信息进行标注,但是需要根据特征空间中不同样本的相似程度,对这些样本进行划分。雷达对抗过程中应用到的聚类分析,便是属于无监督学习方法中的一种[2]。
针对于有监督的雷达状态识别方法而言,常见的分类算法有人工神经网络、决策树以及K-近邻算法、支持向量机等。其中支持向量机法的应用,在高位模式识别、小样本中有着诸多优势,并且该方法能够应用于函数拟合等其他机器学习问题中。根据传统雷达状态识别工作来看,传统的识别方法SVM只能对训练样本集中的已有类别进行识别,最终形成SVM模型。在SVM模型构建完成之后,需要根据不同空间中的数据信息分析情况,对单类别模式的所属范围进行探究。分析其是否属于新类别的范围。根据该方法的应用情况来看,因为每次只能假设样本中只存在一种新类别,因此该方法本身便具有一定局限性。
有关无监督学习方法可以分为两大类,分别为间接聚类方法与函数估计方法。间接聚类方法主要利用样本间的相似性进行度量,而函数估计方法主要是基于概率密度函数开展的相关运算。在本文中,重点讨论聚类方法,需要将最终结果样本划分成不同类别,而后应用其解决分类问题[3]。常见的聚类算法有模糊聚类、谱聚类以及K-均值聚类,在应用这些算法之前,一定要明确聚类个数。但是根据实际情况来看,虽然聚类算法在应用过程中能够在一定程度上解决雷达设备运行时存在的未知状态识别问题,但是有关识别结果的精确度一直以来都是雷达对抗过程中普遍存在的瓶颈。只有将该瓶颈有效解决,才能保证未知雷达状态识别工作有序开展。
2 未知雷达状态识别方法
根据当前我国认知雷达对抗中未知雷达状态识别工作的实际情况来看,主要包含以下两类型识别方法:
2.1 有监督分类的未知雷达状态识别
在探究有监督分类下的位置雷达状态时,首先假设干扰方前端接收机已经采集到了相关雷达发射信号样本,并且对雷达的信号样本开展了模数转换工作。将采集到的信号样本经过处理后直接标准分类,而后将这些分类划分为已知雷达状态,工作人员需要结合实际情况采用模式分类算法对雷达设备的状态进行识别,以便能够获取设备运行信息。
工作人员要注意,在探究雷达运行过程中状态识别工作时,如果在有监督分类的基础上开展,那么需要对雷达设备的一致状态边界进行处理。如果是在雷达运行过程中,对该设备已经存在的型号样本进行分析,那么信号样本如果属于状态分类边界外的现象,那么我们可以将该信号样本认定为未知状态。
根据实际情况下,在有监督分类的位置雷达状态识别工作中,想要表征已知类别的分类边界存在诸多难点。一味的按照之前雷达状态识别工作中的训练样本开展,将会造成数据过于拟合的现象。一旦分类边界划分过大,将会导致样本出现错误现象。基于此,工作人员在此过程中需要充分考虑各个类别边界的合理泛化[4]。为了解决这一问题,可以对于所有己知状态都构建一个单类别分类模型,以此来判断样本类型。如果新样本不属于一致状态,那么则说明样本存在有未知状态。此外,还可以采用支持向量域描述,所谓的向量描述指代的是一种类别分类问题算法,该方法能够将雷达运行时产生的单类别数据样本进行训练,最终得出超球面,有效覆盖所有已经得到的数据信息。最后,还能够确保相关样本数据信息具有良好的泛化能力。雷达状态识别过程中,如果识别出了一个新样本,并且该样本直接落入超球面内,那么则认为该样本属于该范围,否则认为该样本不属于该范围。
2.2 无监督聚类的未知雷达状态识别
在有监督分类的情况下,要求在雷达状态识别工作中对采集到的信号样本数据进行标注,并且不能对未知状态的样本进行分析。但是根据认知雷达对抗工作的开展情况来看,此项工作的本质是一个动态博弈过程,双方在此过程中会开展躲避、识别工作。基于此,雷达设备在相互对抗过程中,一定要主要对外界环境全面掌握,并且做出有针对性的反应。因为人工标准样本工作量十分庞大的关系,无法满足雷达系统运行时的时效性要求。此外,在目前科学技术水平不断提高的背景下,有关电子设备之间的对抗愈发复杂,雷达设备运行时的信息也逐渐表现出复杂趋势,相关波形变化较为频繁。干扰方在此情况下,收集到的信号数据量会不断增大,这一现象将会导致人工标准信号样本难度增大。基于此,传统标准方法已经不能满足新时代雷达设备的发展要求。工作人员需要将采集到的相关信息样本作为未知雷达状态,在不对数据信息人工标注的情况下,促使类别划分工作实现自动分类。聚类身为无监督状态下的典型学习方法,可以通过某种相似度度量方法,将采集到的数据对象划分为多个类,促使同一类中的对象相似度能够尽可能的增大,不同类的对象差异尽可能变大。在诸多类型的聚类算法中,吸引子传播算法是应用较为广泛的一种算法。该算法具有高效、快速的作用。在应用过程中不用事先制定聚类数目,便能够有序开展相关计算[6]。该方法改变了传统雷达状态识别工作,为雷达对抗提供了强有力的保障。
3 仿真验证
3.1 仿真设置
在验证两种未知雷达状态识别工作时,首先以机载多功能阵列雷达作为目标雷达。该雷达设备在工作模式下需要开展非合作目标识别、火炮测距、气象规避以及校准等。当干扰方接收到相关雷达信号后,会对信号信息进行处理,最终使得样本具备自己的特征向量。常见的信号参数为五种类型,分别是占空比、瞬时带宽、脉宽、脉冲重复周期、脉冲压缩比。雷达在不同工作状态下,展现的信号参数也有所不同[7]。在开展仿真验证工作时.需要根据雷达状态随机生成一百五十个样本,不同的样本本身有着不同的特征向量,工作人员在对这些样本特征向量进行规划处理时,最终要能够形成特殊的数据矩阵。
3.2有监督的未知雷达状态识别仿真验证
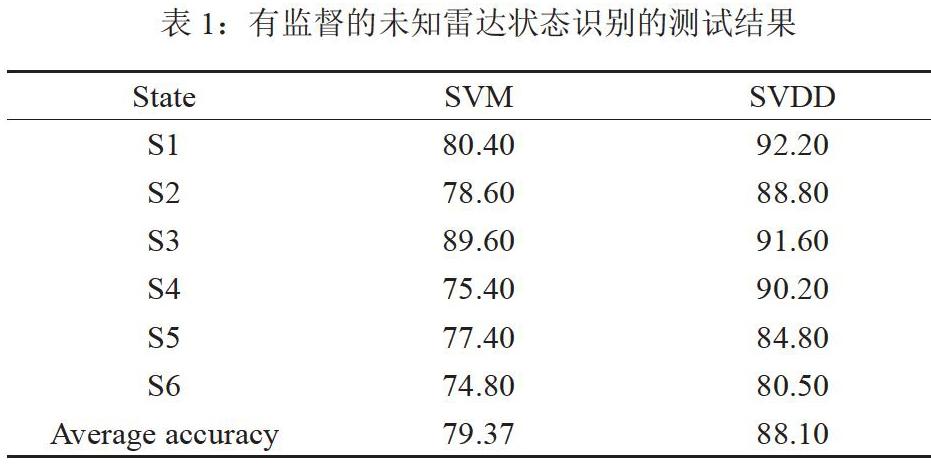
想要为雷达状态开展仿真验证工作,工作人员一定要结合雷达状态,将六种雷达状态中的一种作为未知状态,而后再从己知的样本当中抽选三十个作为测试样本。这样一来,在仿真验证工作中,存在有150个己知状态样本与150个未知状态样本。完成上述工作之后,将五种已知状态的剩余样本作为训练样本,采用SVDD算法,将样本信息进行分类。在此过程中,要将样本信息与传统算法进行比较,并且要对不同的位置状态分别开展十次仿真。表1为十次仿真结果的平均准确率。
由表1可知,在对有监督的未知雷达状态识别工作开展仿真验证工作时,本文提出的识别方法对于信号的位置状态识别准确率高达80%-90%。对于未知状态的平均识别准确率高达88%。但是在传统的SVM算法中,对于未知状态的识别准确率都较低,这一数据充分说明了该方法的有效性[8]。
3.3 无监督的未知雷达状态识别仿真验证
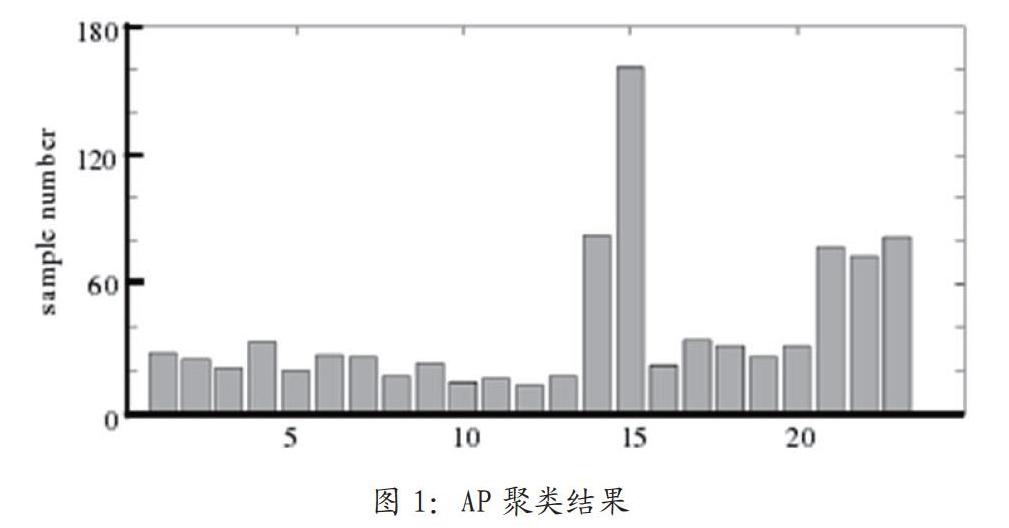
有关AP聚类结果如图1所示。
如图1所示,在对无监督的位置雷达状态开展识别工作时,横坐标代表了聚合类的编号,纵坐标代表了该类别的样本个数。由此可见,在23类数据样本中,有五種样本数据较多。这一现象说明了干扰方识别出来的雷达状态与雷达设备本身的工作模式没有相互对应。总的来说,雷达状态的界定主要以干扰方能够接收雷达信号为依据。在此过程中,只要干扰方能够从自身角度出发,探究了不同条件下雷达状态,那么便能够根据相关学习算法对雷达设备的干扰策略不断优化,最终对不同的状态形成最优的干扰样式,确保雷达干扰工作有序开展。
4 结语
综上所述,根据当前我国认知雷达对抗工作的开展情况来看,在该对抗工作中积极引进闭环行为学习过程,能够使得雷达对抗工作的针对性、主动性不断增强。总的来说,雷达状态识别工作是认知雷达对抗的重要基础。根据本文中有监督分类、无监督分类识别算法的应用情况来看,这两种算法的准确率高达85%以上,改变了传统算法中的不足,对于认知雷达对抗中的未知雷达状态识别方法的应用有着十分重要的作用。
参考文献
[1]赵凯.认知雷达对抗中的未知雷达状态识别方法[J].电子工程学院学报,2019,08 (11):P.274-274.
[2]王树亮,毕大平,刘宝等.基于波形自适应的认知雷达机动目标跟踪算法[J].现代雷达,2019,41 (01):5 3-5 9.
[3]沈飞,李争,许雄等.面向雷达对抗的电磁态势认知问题研究[J].强激光与粒子束,2019,31 (09):7 0-74.
[4]王鑫,秦琨,秦轶炜.基于干扰认知的智能化雷达干扰对抗系统[J].电子信息对抗技术,2018,33 (06):48-52.
[5]李咏晋,赵拥军,赵闯.基于典型相关分析的雷达信号脉内特征识别[J].信息工程大学学报,2018,19 (01):47-51.
[6]许程成,周青松,张剑云等.导数约束平滑条件下基于模糊函数特征的雷达辐射源信号识别方法[J].电子学报,2018,v.46;No.425 (07):130-135.
[7]冷鹏飞,徐朝阳.一种深度强化学习的雷达辐射源个体识别方法[J].兵工学报,2018,39 (12):134-140.
[8]宋小梅,郑元珠,袁刚,雷达系统关重特性量化识别方法[J].现代雷达,2018,40 (09):14-16,21.
作者简介
林石(1982-),男,广西壮族自治区贺州市人。大学本科学历,工程师,主要从事电磁战软件设计。
伍燕平(1987-),男,广西壮族自治区桂林市人,大学本科学历,主要从事软件开发。
肖进(1991-),男,湖北省黄冈市人。大学本科学历,助理工程师,主要从事雷达对抗软件设计。
