基于网络可视图的室内人体状态检测研究①
2020-02-14吴哲樊坤鹏方路平
吴哲 樊坤鹏 陈 滨 刘 恺 方路平
(*浙江工业大学信息工程学院 杭州 310023) (**浙江工业大学设计艺术学院 杭州 310023)
0 引 言
室内人体朝向检测是一项重要且应用广泛的技术,在体感游戏、医学护理等领域都有着重要的作用。在体感游戏方面,目前大多数感知技术依赖于特定的传感器,存在佩戴过程繁琐且设备昂贵等问题,这对体感游戏的普及产生了一定的影响。基于无线信号进行人体朝向检测的方法可以更好地提高玩家游戏体验。在医学护理方面,人体朝向的检测可以帮助护士更好地掌握临床病人整体状况,对可能出现的紧急状况进行预警。
传统无线信号的室内人体感知技术主要是基于接收信号强度(received signal strength,RSS)[1-3],但RSS存在波动性大、不够稳定的缺点[4]。相比于RSS,信道状态信息(channel state information, CSI)作为物理层信息将单值的RSS扩展至频域,在频域和时域上提供了更细的粒度信息,而且更加稳定。近些年来,越来越多的研究人员开始使用CSI进行室内人体状态的研究,丁伟利等人[5]提出了一种基于虚拟试验箱的手势识别算法。Liu等人[6]利用CSI信息设计了一个人体睡眠呼吸检测系统,可以识别人体呼吸频率、不同的睡姿和翻身动作。王金甲等人[7]通过研究多通道时间序列信号,提出了一种基于特征融合的活动识别方法,将整体精度提高到87.4%。文献[8]中针对传统无源室内定位存在的缺点,提出了基于朴素贝叶斯(NB)室内定位检测方法,检测精度达到了96%以上。
另一方面,研究人员将时间序列数据构建网络可视图,用复杂网络理论对时间序列数据进行分析。Zhang等人[9]首先提出了把时间序列映射到复杂网络的概念,并且发现规则秩序可以被不同的网络测量指标表征。例如,Lucasa等人[10]介绍了一种把时间序列映射到复杂网络的可视图(visibility graph,VG)算法。进一步地,Luque等人[11]提出了新的网络构建方法即水平可视图算法(horizontal visibility graph,HVG)。在此基础上,易娜[12]又提出了有限穿越水平可视图算法(limited penetrable horizontal visibility graph, LPHVG)用于对时间序列数据的分析。
本文将网络可视图方法应用到室内人体朝向检测中,将采集到的朝向数据类比时间序列构建VG、HVG、LPHVG网络,通过网络特征结合原始统计量对朝向数据进行朝向分类。具体来说,本文方法把检测过程分为训练阶段和测试阶段,训练阶段提取特征建立指纹库,测试阶段利用机器学习算法对测试数据进行分类。为了进一步提高分类的准确度,本文综合了不同天线对上的CSI幅度和相位信息,来确定最终的估计朝向。
本文的主要贡献在于:
(1) 使用CSI信息来对人体朝向进行检测,部署简单,抗干扰能力较强;
(2) 首次将网络可视图算法应用到室内人体朝向检测中,实现对人体朝向的检测;
(3) 使用了多种网络构建方法,将网络特征和原始数据统计量作为特征与机器学习算法相结合,实现对人体朝向的分类;
(4) 测试并讨论了不同因素对分类结果的影响。
本文内容安排如下:第1节介绍系统的结构和原理;第2节讲述特征提取的方法;第3节介绍实验的环境部署、步骤和特征处理方法;第4节是分析实验结果;第5节是对全文的总结。
1 系统结构和原理
1.1 信道状态信息
实现方法的系统框图如图1所示。一个无线信道模型可表示为[13]
Y=HX+N
(1)
其中,X、Y分别是发送信号和接收信号向量,H是信道增益矩阵,N是加性噪声向量。
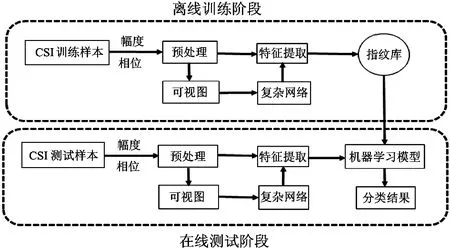
图1 系统框图
根据正交频分复用(orthogonal frequency division multiplexing,OFDM)[14]理论,H可表示为
H=[H1,H2,…,HM]
(2)
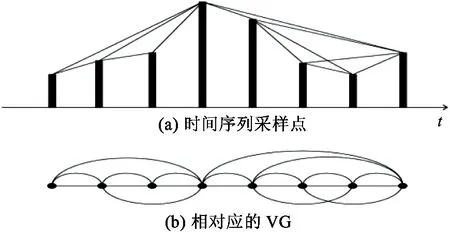
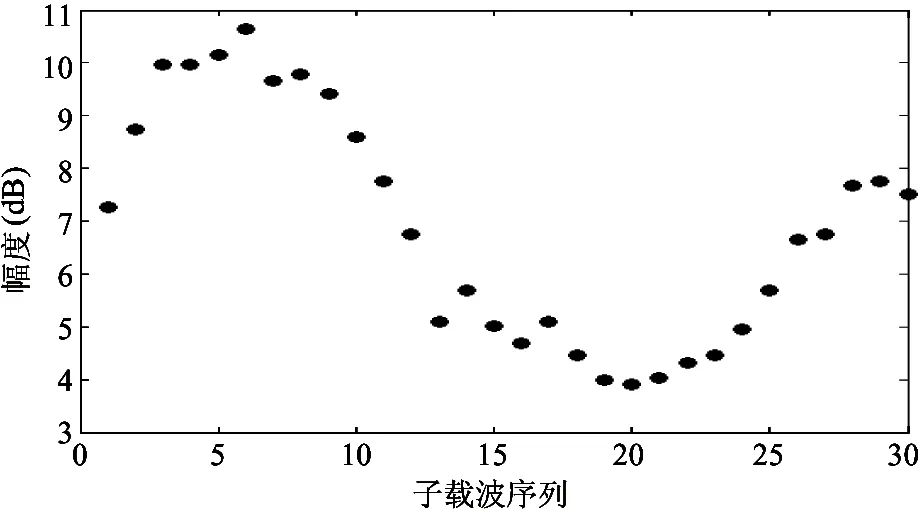
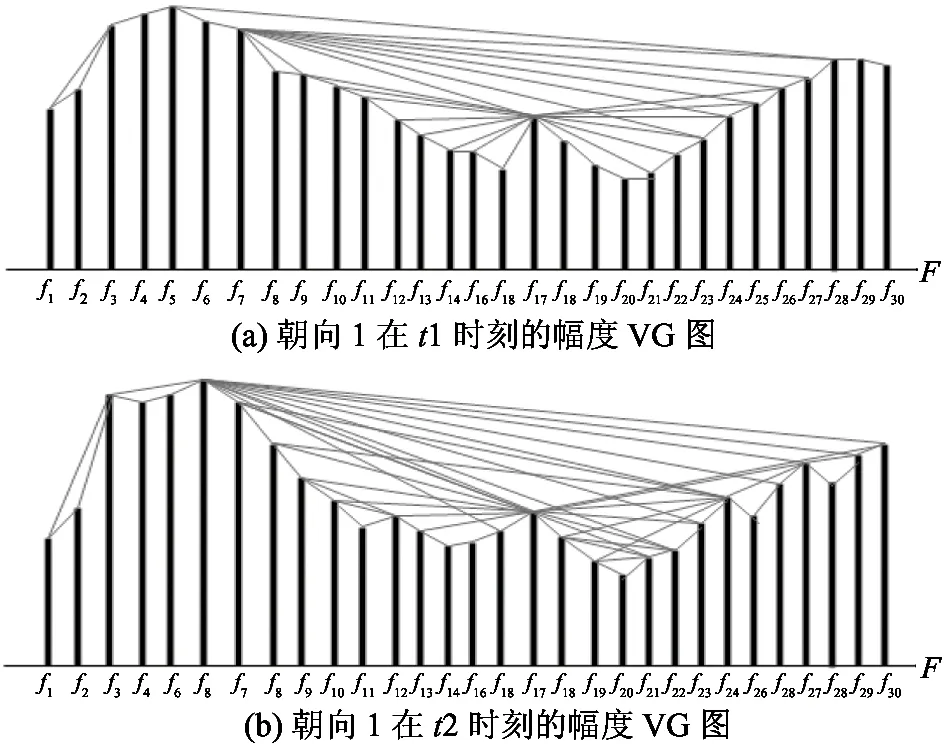
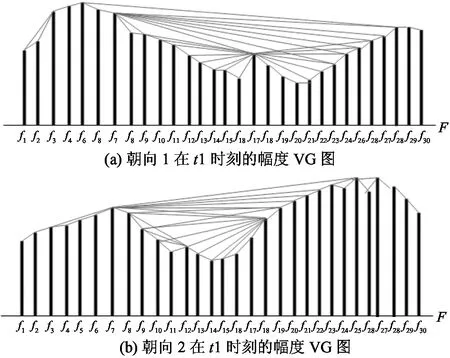
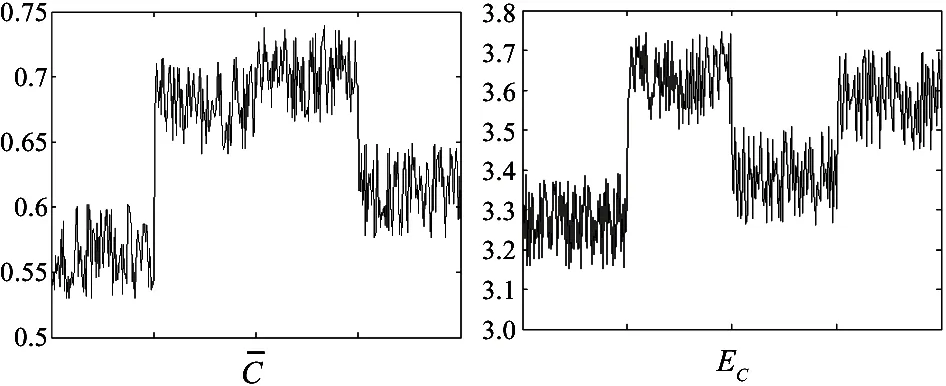
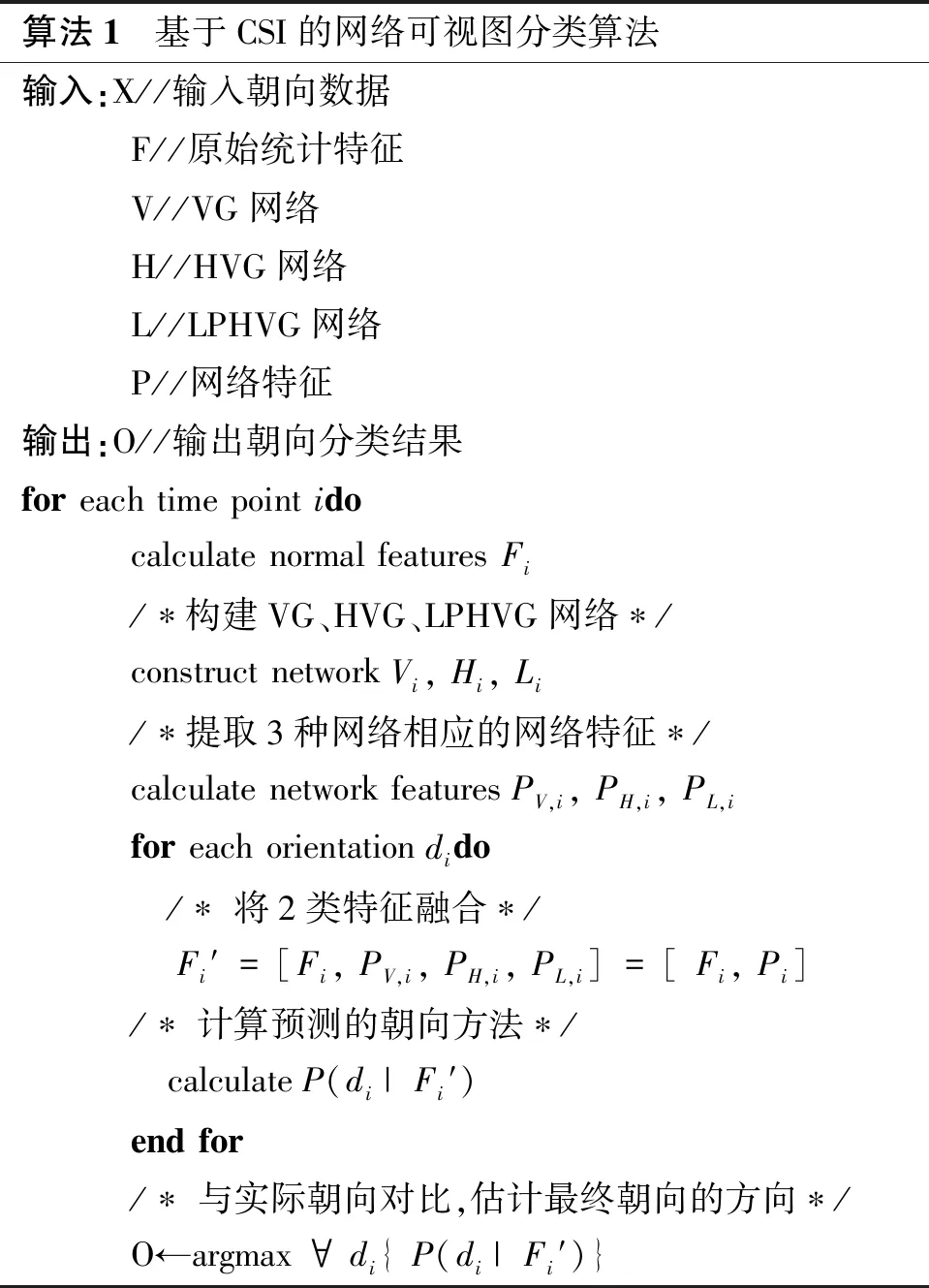
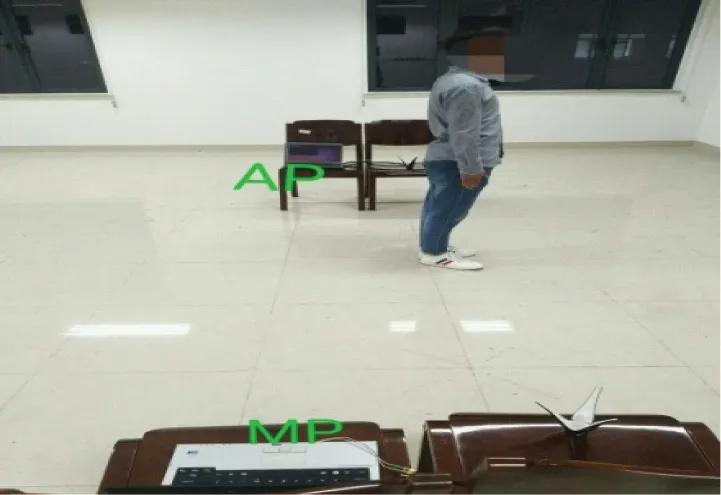
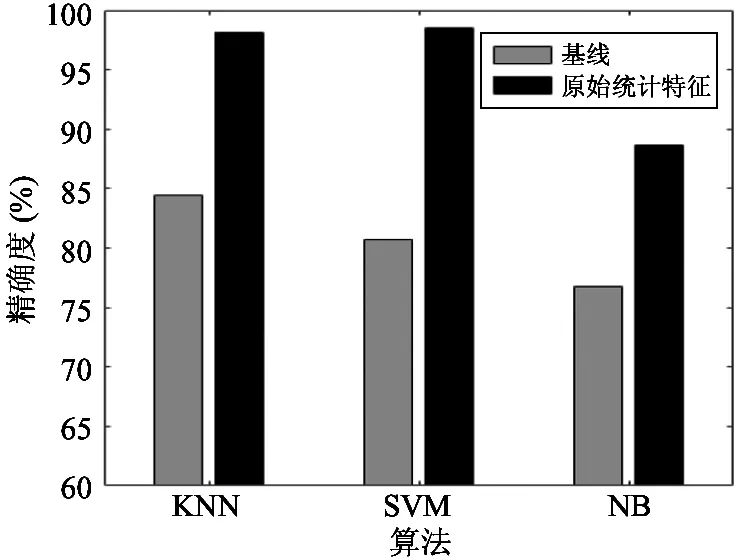
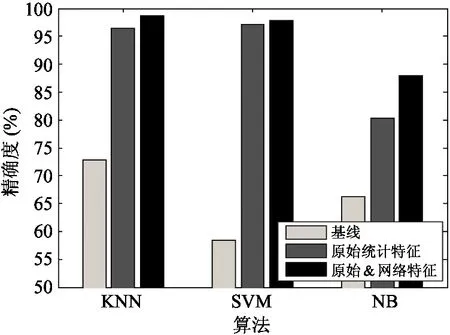
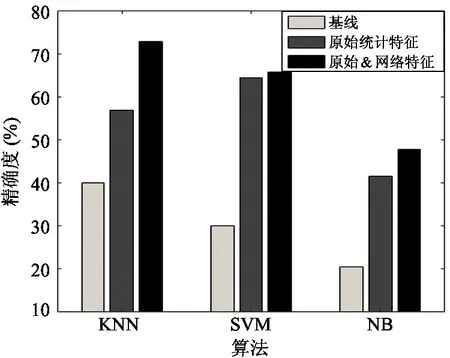
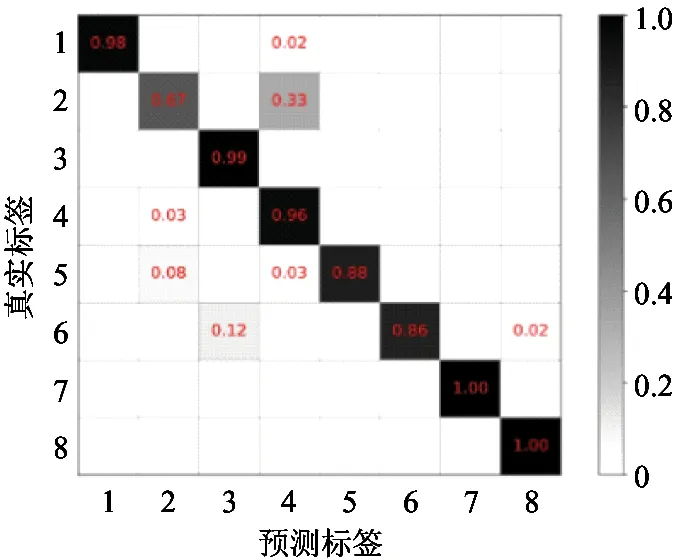
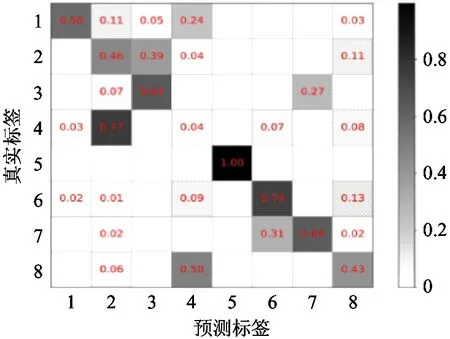
H(fk)=|H(fk)|eisin( (3) 其中,M表示子载波的个数,fk表示第k个子载波,H(fk)表示第k个子载波的CSI,是一个复数,|H(fk)|为第k个子载波的振幅, 实验中,可以通过CSITOOL[15]工具获取CSI数据,并且每个CSI样本由30个子载波序列构成。对于拥有多个发送和接收天线的多入多出(multiple in multiple out,MIMO)[14]系统,每个子载波可以组成一个维度为p×q的矩阵。因此, CSI信息是一个p×q×M的矩阵,其中p为发射天线数量,q为接收天线数量,M为子载波数量。 图2(a)表示了人体在某一环境中同一朝向的2组CSI幅度曲线,可以看出同一朝向相同环境时的CSI基本保持稳定;图2(b)表示不同朝向的情况,可以看出CSI发生了变化且2组数据有明显区分度。 CSI状态参数中,其幅度信息易于获取,稳定性高,因此大多直接利用CSI幅度信息作为原始的采集信息。由于发射端与接收端无严格时钟同步,导致相位信息呈随机分布状态,无法被直接利用[16]。针对该问题,文献[17]提出了利用子载波对称性对原始相位进行线性变化,从而获得稳定的相对相位信息,本文也采用该方法进行相位信息的提取。 根据时间序列网络化[9]的理论,将每个时间点视为网络中的一个节点,而2个满足可视化规则时间点间的连线视为一条边,即可将单变量的时间序列数据映射到网络结构中。 图2 同一朝向与不同朝向CSI幅度曲线 图3显示了将时间序列数据映射为VG网络的过程。图3(a)是包含8个数据点的时间序列样本,图3(b)为对应的VG网络,其中每个节点以相同的顺序对应于时间序列数据。 图3 时间序列数据映射为VG网络的过程 在一个时间序列中,如果2个节点(垂直条的顶部)可以看到彼此,即当连接2个节点顶点的连线不与它们之间的任何数据相交时,则连接这2个节点。如(ta,ya)与(tb,yb)为时间序列中的2个任意数据点,如果它们之间的任意其他数据点(tc,yc)均满足[10] (4) 则称(ta,ya)与(tb,yb)之间具有可见性。通过可见性判定来连接时间序列的各个节点,可以构造相应的VG网络可视图。 原始数据信息作为特征并不能很好地被分类器识别,而且会出现数据冗余的情况,不利于指纹库构建,因此需要考虑从原始数据中提取能反映人体朝向变化的参数作为特征值。通过实验分析,本文采用了以下统计量:CSI信息的最大值(MAX)、最小值(MIN)、标准差(STD)、均值(MEAN)、极差(RANGE)和中位数绝对偏差(MAD)作为机器学习特征。 2.2.1 网络可视图构建方法 本文在直接利用CSI幅度和相位信息的基础上,进一步考虑子载波之间的关联性,而这种关联性也包含了有用的朝向信息。 具体来说,考虑把每个CSI子载波序列样本类比成不同的时间序列,将每个子载波作为网络中的一个节点,不同子载波之间依据不同的可视规则构成连边,以此构建VG网络、HVG网络、LPHVG网络。 图4展示了把一个原始的CSI子载波幅度序列映射为VG网络的过程。图4(a)为一个包含30个子载波序列的CSI幅度样本,横轴表示子载波序号,纵轴表示各子载波的幅度值;图4(b)为依据可视图算法得到的连边关系图,其横坐标表示与图4(a)一一对应的子载波序号,纵坐标代表CSI幅度值。图4(c)为构造的对应VG图,图中不同节点序号的连线代表1到30号子载波序列之间根据VG的构造规则得到的连边关系。 (a) 原始CSI幅度子载波样本序列 (b) CSI子载波幅度连边关系图 (c) 子载波映射VG网络图 可视图网络构建方法如下,对每个CSI样本取任意2个点(子载波)(fa,Ya)和(fb,Yb),其中fn代表第n个子载波,Yn表示第n个子载波的幅度值。若两点之间的任意其他点(fc,Yc)满足fa (5) 则这2个子载波之间有连边。通过以上算法,可以得到一个个由CSI子载波序列构建的网络可视图。 同样地,我们可以得到基于CSI的水平可视图网络的构建方法:若任意2点(子载波)彼此水平可视,即对任意fa Yc (6) 成立,则这2个子载波之间有连边。 进一步,有限穿越水平可视图网络的构建方法为:假设N(取N为1)为有限水平穿越视距,对每个CSI样本取任意2个点(子载波)(fa,Ya)和(fb,Yb),其中fn代表第n个子载波,Yn表示第n个子载波的幅度值。若这2个相隔M个点的点之间存在Q(0≤Q≤N)个数据点(fc,Yc),其中fa Yc>Ya或Yc>Yb (7) 其余M-Q个点(fd,Yd),其中fa Yd (8) 成立,则这2个子载波之间有连边。 2.2.2 网络特征地提取 图5、图6分别为同一朝向和不同朝向CSI子载波幅度连边关系图。由图5可知,同一朝向的子载波幅度虽然受周围环境影响会有所波动,但最终构建VG网络子载波连边关系还是有很大的相似性,说明提出的基于CSI信息构建的网络可视图有很强的稳定性,即具有一定的抗干扰能力;而在图6 图5 同一朝向子载波连边关系图 图6 不同朝向子载波连边关系图 中显示不同朝向的CSI子载波幅度明显不同,导致网络的子载波连边关系也不同。 (9) 其中,τi, Δ表示以节点i为中心的闭合三元组的个数,τi表示以节点i为中心的三元组的个数,ci表示节点i的聚类系数,N为构建网络时的网络节点的个数。 (10) 其中,ci表示节点i的聚类系数,N为网络的节点总数。 (11) 图7反映了VG网络下的这3个不同网络特征在4个朝向上的变化。由图可知,这些网络特征虽然具有一定的辨识度,但还并不能明显区别不同朝向,这说明单从VG网络提取的特征还不能很好地反映出子载波之间的关联特性。为了更多地获取子载波之间的关联信息,本文构建了HVG、LPHVG 2种网络,提取相应的3种网络特征,并与VG网络特征结合,用于最终朝向检测的机器学习分类特征。 特征在不同朝向的变化 (b) Ec特征在不同朝向的变化 (c) kstd特征在不同朝向的变化 上述过程的伪代码如算法1所示。 首先输入采集的朝向CSI数据,然后对第i个CSI子载波序列样本提取原始统计特征Fi,并依据不同的可视算法构建VG、HVG、LPHVG网络Vi、Hi、Li,提取相应的网络特征PV,i,PH,i,PL,i,最后将2类特征Fi与Pi融合得到Fi′=[Fi,PV,i,PH,i,PL,i]=[Fi,Pi],计算预测朝向的分类P(di|Fi′),并与实际朝向做对比,估计最终的朝向方向。 实验中所用到的设备主要分为2部分即接入点(AP)和监控点(MP),分别为2台装有Intel 5 300无线网卡的笔记本电脑,并且都安装Ubuntu 14.04 LTS操作系统和CSITOOL用于收集CSI数据。每块无线网卡都提供了3根天线,理论上共可以得到9对天线链路,但实际中由于受到环境干扰及设备自身状态影响,能够稳定提取的链路数为3根。 算法1基于CSI的网络可视图分类算法输入:X//输入朝向数据 F//原始统计特征 V//VG网络 H//HVG网络 L//LPHVG网络 P//网络特征输出:O//输出朝向分类结果for each time point ido calculate normal features Fi /∗构建VG、HVG、LPHVG网络∗/ construct network Vi, Hi, Li /∗提取3种网络相应的网络特征∗/ calculate network features PV,i, PH,i, PL,i for each orientation dido /∗ 将2类特征融合∗/ Fi′=[Fi, PV,i, PH,i, PL,i ]=[ Fi, Pi] /∗ 计算预测的朝向方法∗/ calculate P(di| Fi′) end for /∗ 与实际朝向对比,估计最终朝向的方向∗/ O←argmax ∀ di{ P(di| Fi′)} 本文选取了2个环境进行实验。第1个实验环境为空教室,房间尺寸为8 m×12 m,如图8所示;第2个环境为办公室,房间尺寸为10 m×15 m,如图9所示,环境较为嘈杂,多径影响也比较严重。 图8 实验环境1(空教室) 图9 实验环境2(办公室) 在这2种环境下,首先确定AP、MP的位置,然后选取AP、MP之间的一个固定点分别进行4个朝向和8个朝向实验。4朝向实验时,志愿者站在该位置点上沿顺时针方向依次转动90°,共4个朝向;同样的,让志愿者站在该位置点上,沿顺时针方向依次转动45°,可以得到8个朝向的数据。此外,本文设置数据包的发送速率为100个/s,每次数据采集时间为10 s。 在训练阶段和测试阶段分别采集数据,并且保持2次采集时,人体所处位置保持不变。训练阶段将采集到的数据提取特征后录入指纹库,处理训练数据并生成特征指纹库;测试阶段,利用本文所提方法对测试数据进行朝向的预测分类,并与实际朝向相对比,从而确定朝向检测精度。 由于原始数据的统计特征与网络特征是2种不同类型的特征,处理方法也有所不同,通过实验分析,本文采用了如下方法。 (1) 对原始数据提取的特征,采用归一化的处理方法。 (12) (2) 对网络特征,采用Z-score标准化方法进行处理。 XN=(Xo-μ)/σ (13) 其中,XN表示归一化后的数据,Xo表示归一化前的数据,μ表示该数据的平均值,σ表示该数据的标准差。 人体朝向检测问题最终可以归结为分类问题,本文采用了3种经典的机器学习算法进行分类比较,分别为K近邻(K-nearest neighbor,KNN)、朴素贝叶斯(naïve Bayes,NB)和支持向量机(support vector machine,SVM)。 实验首先研究了4朝向的分类检测效果,如图10所示,其中X轴为3种不同的算法,Y轴为检测精确度。 图10 办公室环境4朝向检测效果 结果表明,在较为嘈杂的办公室环境,仅采用原始数据统计量作为特征对4朝向进行检测都是有效的,最好的检测精确度达到了99%。 在此基础上,又进行了8朝向检测来研究更加细粒化的室内人体朝向分类情况,实验结果如图11和图12所示。 图11 8朝向空教室3种方法检测效果 图12 8朝向办公室3种方法检测效果 由图11和12可知,2种环境中,本文所提出的原始统计特征结合网络测量特征进行8朝向检测的方法都是最好的。检测算法为KNN算法,教室环境下使用原始统计特征的精度为96.38%,而在结合了网络特征后,检测精度进一步得到提升,达到了98.66%,提高了2.3%;在多径效应丰富的办公室环境,结合网络特征,提升效果更加明显,比仅使用原始统计特征时提高了16%左右。这说明构建网络提取的网络特征对提升不同环境下的朝向检测精确度都是很有效的,所选的网络特征能够表征不同朝向。 此外,只使用幅度信息提取的网络特征比使用幅度和相位信息得到的网络特征分类效果更好,这可能是因为相位信息对周围环境过于敏感,使得它并不能反映出不同朝向所构建网络的特性,故本文的实验都只使用CSI的幅度信息提取网络特征。 图13和14给出了2种环境下8朝向分类效果的混淆矩阵。其中横轴和纵轴分别代表该位置被分类到的朝向和真实朝向,每个色块的颜色深浅表示该朝向分类到某个朝向的概率。对角线上的颜色越深,则说明该方向的朝向分类效果越好。总体来说,分类的大部分结果都集中在对角线上,即获得了正确的分类。在图13中,只有部分方向2的数据被误分给了方向4,少量方向6的数据被误分给了方向3,少量方向5的数据误分给了方向2和4,而其他的都基本分类正确;而在图14中,由于实验环境比较嘈杂,方向误判的数量也相对较多一些。 图13 空教室下8朝向分类混淆矩阵 图14 办公室下8朝向分类混淆矩阵 此外,本实验还记录了4朝向和8朝向的训练/测试的时间,以此来比较3种机器学习分类算法在本实验的时间复杂度,结果如表1所示。 表1 不同算法的训练/测试时间 由表1可知,无论是4朝向还是8朝向,算法用时最多的都为KNN,SVM次之,用时最少的为NB。所以,建议在实时性要求较高、精度要求较低的场景下可以使用NB算法;而在实时性要求较低,但精度要求较高的场景下使用KNN或SVM算法。 本文提出了一种基于网络可视图的人体朝向检测方法,将时间序列网络化的理论应用到了室内人体朝向检测中,并利用机器学习算法进行朝向分类。通过实验发现,仅使用原始统计特征进行朝向分类,就能够达到很好的检测效果;而将CSI信息进行网络可视化,提取网络特征并综合原始CSI数据统计特征的方法,可以进一步提高朝向检测的精确度。此外,本文还讨论了不同的因素,如环境对实验结果的影响,并且发现KNN和SVM算法效果优于NB算法,8朝向的最佳检测精度可以达到98.66%。 本文为室内人体状态检测提供了一种新方法,后续可以进一步开展多目标和室内移动状态下的人体朝向研究。1.2 CSI幅度相位信息提取
1.3 网络可视图

2 特征提取
2.1 原始特征提取
2.2 网络特征提取





3 实验步骤和数据预处理
3.1 实验步骤

3.2 特征向量的处理

4 实验结果及分析

5 结 论
