基于蓝牙技术的室内定位系统设计
2020-02-07赵雨境
赵雨境
摘 要:文中设计基于蓝牙技术,利用三边测量法、卡尔曼滤波器等推演方法进行定位、误差修正,通过手机开发实现室内物品的定位、跟踪等功能。系统具有结构简单、低功耗、低成本、可支持多种手机(Android及iOS)应用、实用性强等特点,可被应用在图书馆、体育馆、实验室、超市等场景下,快速进行物品搜寻定位、人员导航指引等,具有一定的推广价值。
关键词:蓝牙;iBeacon;定位;三边测量法;卡尔曼滤波器;信号强度
中图分类号:TP39;G482文献标识码:A文章编号:2095-1302(2020)01-00-05
0 引 言
随着现代通信与信息技术的发展,智能手机在导航、定位等方面的应用服务得到广泛认可。目前室外定位技术非常成熟,如我国的北斗、美国的GPS,以及百度地图、Google地图等,无论我们走到哪里都可以准确获知自己所处的位置,同时还可以了解周围商超、交通、餐饮等信息。但进入室内后,由于建筑物的屏蔽作用,使得卫星定位系统信号强度降低,上述应用服务的精确度大大下降,因此我们研究探讨了室内定位技术这一课题。
目前,常用的室内定位技术包括WiFi,RFID以及蓝牙等。本项设计基于蓝牙低功耗iBeacon技术,利用iBeacon模组以及自主开发的定位推演法,通过多个基地台与节点间的信号强度推算出各设备间的距离,从而计算出节点坐标位置,再配合手机APP,实现手机室内定位导航。
1 技术简介
1.1 蓝牙技术(Bluetooth)
蓝牙技术是一种短距离无线电通信技术标准,它工作在2.4 GHz频段,数据速率为1 Mbit/s、传输距离约10 m,可实现手机与计算机、家电、数码产品等的无线连接,便于移动操作。
2010年6月发布的蓝牙4.0版兼容传统蓝牙以及高速蓝牙,同时还可以利用智能技术降低功耗,因此被称为蓝牙低能耗版本 (Bluetooth Low Energy,BLE)。该无线技术拥有低成本、短距离、可互操作等优点。
1.2 iBeacon
iBeacon是苹果公司于2013年9月发布的供移动设备使用的低功耗、低成本信号传送器。其工作方式采用低功耗蓝牙(BLE)技术,向周围发送自己特有的ID,接收到该ID的装置可以享受获取物品信息、资讯告知等服务,还可以通过接收信号的强度推算物品距离及位置等。
1.3 室内定位技术比较
目前常用的室内定位技术有WiFi,RFID及蓝牙等,它们具有各自的优缺点。
(1)WiFi的优点是定位距离较远(100~300 m)、数据传输速率快(300 Mbps)且智能手机支持WiFi室内定位技术,但同时其缺点也较明显,如功耗大、不支持电池续电、一般需要市电供电、成本高等。
(2)RFID的优点是无需供电、成本低、應用广泛,但其传输距离短(1 m以内)、速率低(小于250 Kbps)、抗干扰能力差,且不支持手机应用。
(3)蓝牙iBeacon的优点是低功耗、低成本、传输距离10 m以上、传输速率1 Mbps以上、支持智能手机应用,因此适合室内定位。其缺点是在较大空间里,如体育馆、展览馆等,需要设置多个基地台才能实现准确定位。
2 开发工具
2.1 硬件工具
2.1.1 Arduino IDE
Arduino IDE是含有开发板和开发环境软件的开源开发平台。核心是Atmel公司设计生产的AVR单片机,具有开源、廉价、简单易懂、容易上手等优点,适合快速开发。其在本项设计中的作用是设定基地台相关参数,对iBeacon基地台的数据进行测试或修改,利用AT指令设置iBeacon设备、节点,以接收基地台信号。
2.1.2 智能手机
目前无论是Android手机还是iOS手机都支持蓝牙技术。Android4.3以上的版本还支持iBeacon。所以在此项设计中,只要符合上述要求的手机都能实现定位功能。
2.1.3 HM-10蓝牙4.0模块
HM-10模块价格较高,但功能齐全,可以由Arduino发送AT指令修改相关参数,将其设置成主模式或从模式,其中从模式可以作为iBeacon 基地台,发射信号给手机,主模式可以接收来自其他基地台的信号,从而实现不同位置节点的相关功能。
2.1.4 CC41a蓝牙模块
CC41a蓝牙模块价格较低,结构简单,不能作为主模式设备使用,只能发送信号,但优点是功耗低、成本低,可以设置成基地台,发射信号给手机或其他主模式设备。
2.2 软件工具
2.2.1 Visual Studio
在Visual Studio环境下,利用C#开发窗口界面。将基地台语法、卡尔曼滤波器语法、三边测量法的语法加以整合,设计手机应用APP。同时还包括接收蓝牙的信号强度,计算坐标数值,将使用者或物品等坐标位置直观显示在地图上。
2.2.2 Processing
Processing可以制作出简单的接口界面,将Arduino信息传送给Processing,由其处理后显示在界面上。例如通过测试卡尔曼滤波器滤波前和滤波后的曲线图,将平滑后的信号强度传送给Processing,处理后显示。
2.2.3 Origin
通过Origin修正数学公式。利用信号强度数据修正距离公式系数,只需将测量好的距离以及信号强度数据进行比对,利用数据拟合即可产生新的系数。
3 系统设计
室内定位系统的工作原理:将三个(或更多)蓝牙iBeacon基地台放置在某一场所内不同的特定位置,通过手机APP接收基地台信号,按照推算方式计算出手机坐标。根据iBeacon特性,当手机接近具有iBeacon功能的物品时会接收到相关信息,并在手机地图中显示物品的位置信息,从而实现寻找和定位功能。
3.1 校正精度
3.1.1 接收信号强度测量法
接收信号强度测量法(Received Signal Strength Indicator,RSSI)根据三个以上基地台发射的信号强度,通过传输过程中的信号衰减数据构建信号传输模型,计算出信号强度与距离的关系后,推算出手机与基地台间的距离。
3.1.2 多路径效应(Multipath)
室内家具、展柜、立柱等障碍物使信号出现反射、绕射、散射等现象,同时障碍物位置或材料的差异也会影响信号传输的路径和强度,所以同一个基地台因为上述因素而造成接收到多个不同强度信号的现象被称为多路径效应。
3.1.3 物体遮挡效应(Object Occlusion Effect)
室内物体如人体、金属、墙壁等遮挡因素都会使信号产生折射或散射,导致信号强度有所衰减,影响定位精度,所以必须克服上述因素的干扰。
3.1.4 通过信号强度推算距离
RSSI是通过接收到的信号强弱测定信号点与接收点的距离,进而根据相应数据进行定位计算的一种定位技术。测试信号由iBeacon 蓝牙基地台发射,通过手机软件、电脑等测试设备进行测量,然后将信号强度值代入公式(1),计算出距离:
式中:Distance为iBeacon基地台与接收设备间的距离;RSSI为信号强度;txPower为基地台额定发射功率。
3.1.5 实验效果
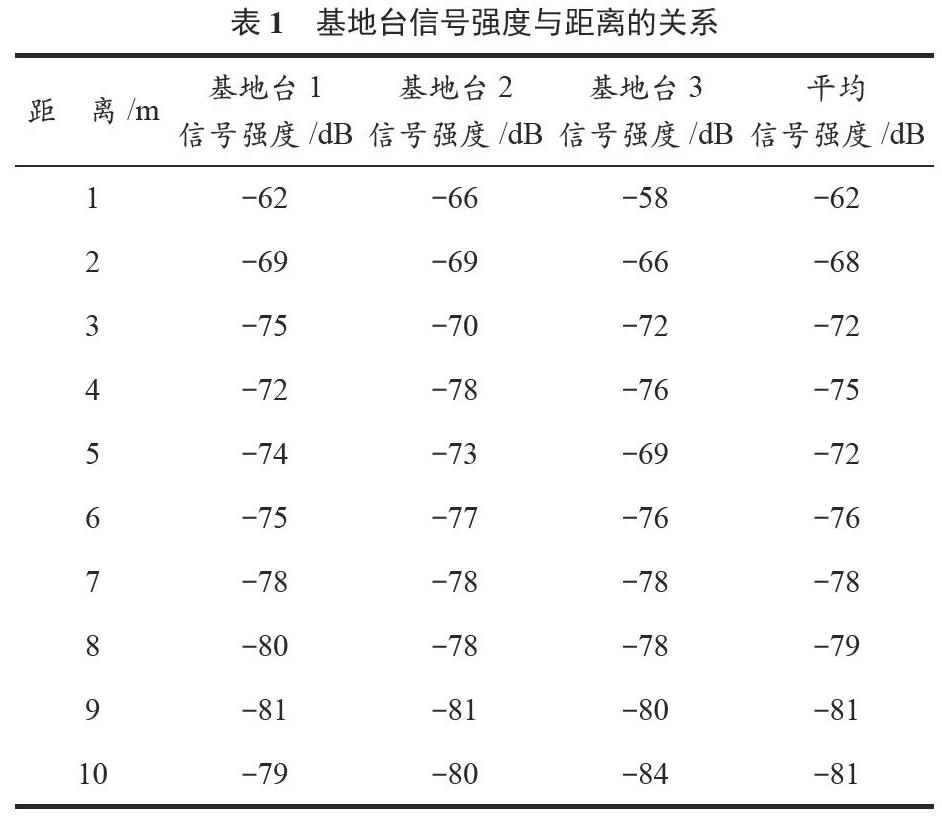
(1)iBeacon基地台信号强度与距离的关系
本实验首先在室内无障碍状况下测量信号强度与距离的关系。将三个基地台相隔1 m并排放置,利用手机每隔1 m测试一次信号强度,测试最远距离为10 m,共测试10次。然后用卡尔曼滤波器平滑信号值,测试结果见表1所列。
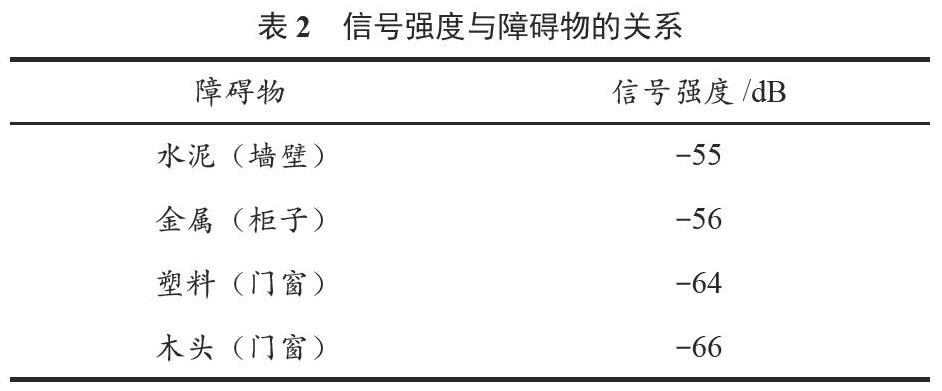
(2)信号强度与障碍物的关系
根据物体遮挡效应测试信号经过不同障碍物后其强度的衰减情况。首先将HM-10模块放置在不同材质的障碍物后,然后隔着障碍物在距离1 m的情况下测量不同材质对信号传输的影响。实验证明水泥与金属对信号影响较大,具体见表2所列。
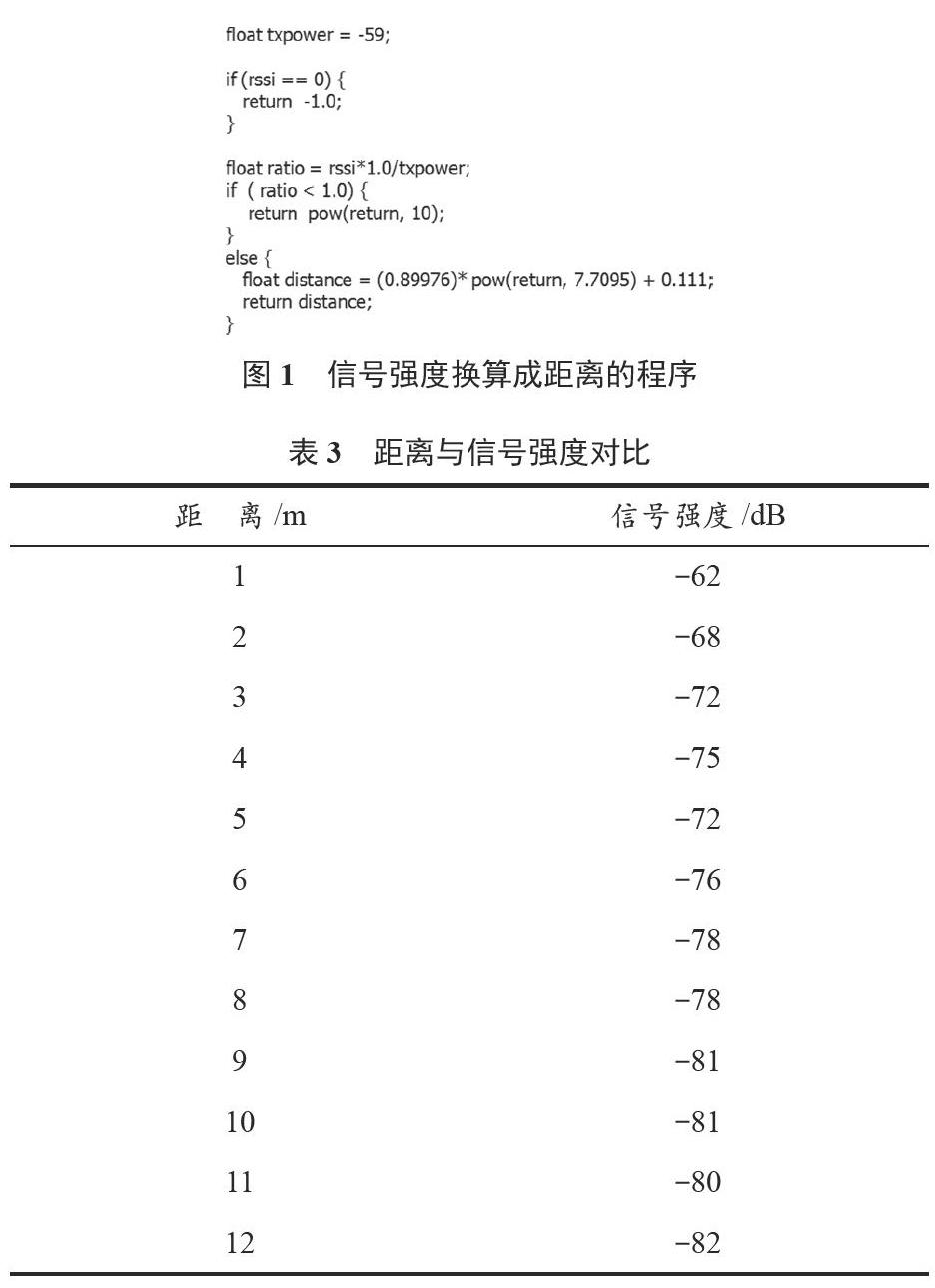
(3)信号强度转换成距离
根据公式(1)可知,信号强度换算成距离的公式:A×(X/-59)B+C,其中X是手机测试的基地台信号强度,A,B,C为可变系数。据此设计信号强度换算成距离的程序如图1所示。距离与信号强度对比见表3所列。
根据表1可知在无障碍状况下信号强度与距离的关系,但在实际情况下会有多种障碍物存在,所以每次在不同空间、不同环境下都要不断修正系数。即利用Origin工具进行数据拟合,修正系数。表3所列为实际应用中距离与信号强度的对比数据。我们将对应数据带入公式,通过不断拟合数据,修正参数A,B,C来获得较为理想的距离与信号强度对应公式。
3.2 改善信号稳定度
1960年,卡尔曼发表了著名的《A New Approach to Linear Filtering and Prediction Problems》论文,主要阐述了如何使用递归方法解决离线数据线性滤波问题。尤其在自主或协助导航领域,其被用于解决阿波罗计划的轨道预测问题以及各种运输工具的控制系统问题。
卡尔曼滤波器由一系列递归数学公式描述,它提供了一种高效可计算的方法来估计过程状态,并使估计均方误差最小。其应用广泛且功能强大,可以估计信号的过去和当前状态,甚至能预估信号未来的状态。
在本设计中,信号在传输过程中一旦遇到障碍物,信号强度就会快速发生变化,因此需要通过卡尔曼滤波器来平滑信号强度,主要分为预测与更新两个阶段。预测阶段利用公式不断验证当前状态,确认相关系数;更新阶段利用当前状态数据优化获得新的预测值,随着公式的循环应用计算,将获得更精确的预测数据。
(1)过程系统与估计系统
式中:X(k)是k时刻的系统状态;U(k)是对系统的控制量;A为状态转移矩阵;B为控制矩阵;W(k)为过程噪声。
(2)预测方式
利用系统的过程模型来预测系统的下一状态。假设当前的系统状态为k,则根据系统模型可以预测出:
式中:X(k|k-1)是利用上一状态预测的结果;X(k-1|k-1)是上一状态的最优结果;U(k)为当前状态的控制量。
系统结果已更新,但对应于X(k|k-1)的均方差还未更新。均方差表示如下:
式中:P(k|k-1)是X(k|k-1)对应的协方差矩阵;P(k-1|k-1)是X(k-1|k-1)对应的协方差矩阵;A'表示A的转置矩阵;Q是状态转移噪声。
(3)优化系统
通过现在状态的预测结果和测量值,可以得到当前状态的最优估算值:
Kg为卡尔曼增益:
我们得到了k状态下的最优估算值X(k|k)。但为了保持卡尔曼滤波器的持续运行,我们需要更新k状态下X(k|k)的均方差:
式中I为1的矩阵,对于单模型单测量,I=1。当系统进入k+1状态时,P(k|k)即为公式(5)的P(k-1|k-1),據此算法就可以持续进行自回归运算。
(4)实验效果
利用卡尔曼滤波器对测试信号进行平滑优化,首先要确定公式中的3个常数Q,R,P。我们根据经验和规律确认Q=0.125,R=32,P=1 023,然后将测试的信号强度数据经由卡尔曼滤波器进行平滑处理,得到优化后的数据,具体见
表4所列。图2为利用Arduino IDE绘制的卡尔曼滤波器平滑优化数据前后对比图。
3.3 定位推算法
(1)三角(三边)测量法
三角测量法是在地面选一系列控制点,相互连接成若干个三角形。根据已知控制点的坐标、起始边的边长和坐标方位角,经解算三角形和坐标方位角推算得到三角形各边的边长和坐标方位角,进而由直角坐标公式计算待定点的平面坐标。本设计中主要采用图3所示的三角定位系统原理。三角定位坐标计算公式如下:
图中的P1,P2,P3代表三个基地台的位置,r1,r2,r3分别代表三个基地台的信号强度半径,x,y代表手机或物品的位置。当已知三个基地台的坐标和半径后,通过三角定位公式推算出x,y的坐标位置。
(2)实验效果
在室内选定遮挡物较少的角落分别放置三个基地台。首先确定其中相对中间的基地台的坐标为P1(0,0),再确定x轴和y轴方向,然后确定另外两个基地台的坐标P2(X2,Y2),P3(X3,Y3),并测量距离与坐标的对应数据,如图4所示。将数据带入公式进行验算修正,去除障碍物的影响,以此为基础进行手机APP及地图开发,图5所示为手机上展现的地图。
综上所述,为了测量、计算、开发更方便,我们将3个基地台摆放成等边直角三角形,并尽量避开障碍物。在测量坐标与距离关系时需沿着边线及各角进行验算修正。在不同大小、形状、结构的空间内需要重新定义坐标、验证坐标与距离的关系。
4 结 语
系统工作流程:手机或物品接收到基地台信号后,通过卡尔曼滤波器消除误差较大的信号数据,然后将处理后的信号数据换算成距离,最后再利用三角定位法计算出手机或物品坐标。但考虑到障碍物位置不同、房间大小及形状不同等原因,造成iBeacon 基地台信号传输衰减曲线不同、信号强度与坐标对应误差不断变化等情况发生,这就要求我们采取必要的方式消除干扰,减少误差。本设计中采用卡尔曼滤波器来平滑信号传输误差问题、用三边测量法反复修正坐标位置、用RSSI技术确认信号强度与距离的关系,依此设计出手机软件及APP,实现室内定位的目标。
蓝牙技术系统可用于多个领域及场所,实现物品寻找、定位及通道引导等功能。如在图书馆适当区域或书本上放置iBeacon节点,当手机接近时就可以显示书名、书号等信息;在大卖场中设置iBeacon节点,通过手机或设置在购物车上的设备即可了解附近区域的商品信息或实现寻找商品、引导路径等功能;目前市场上生产的汽车都具有蓝牙功能,如果在大型停车场布设iBeacon节点,就可以实现引导停车、车辆定位等功能。蓝牙技术的应用领域还有很多,需要我们不断研究和探索,通过本系统的设计和实施,证明将蓝牙iBeacon技术应用于室内定位是可行的,具有广阔的应用和发展前景。
参 考 文 献
[1]李远雷.基于Android平台蓝牙4.0技术的博物馆室内定位系统设计与实现[D].西安:西安电子科技大学,2017.
[2]朱鹏飞.基于RSSI的室内定位算法研究[D].昆明:云南大学,2016.
[3] KALMAN R E.A new approach to linear filtering and prediction problems [J]. America:francine battaglia,journal of basic engineering,1960,82(1):34-35.
[4] OGUEJIOFOR O S,ANIEDU A N,EJIOFOR H C,et al.基于三邊测量的无线传感器网络定位算法[J].国际科学与现代工程杂志,2013(1):21-27.
[5] JYOTI R K,SINGH N.基于模糊优化的改进三边测量在WSN中的定位[J].国际计算机科学与软件工程高级研究期刊,2013,3(7):657-663.
[6]王健兴.基于iBeacon的室内定位系统[J].通讯世界,2017(24):3-5.
[7]牛超,汪辉,王若璇,等.基于iBeacon的固定资产定位与防丢防盗系统的设计[J].物联网技术,2019,9(1):78-79.
[8]刘明伟,刘太君,叶焱,等.基于低功耗蓝牙技术的室内定位应用研究[J].无线通信技术,2015(3):19-23.
[9]石志京.基于低功耗蓝牙的室内定位技术研究[D].宁波:宁波大学,2015.
[10]车敏,张红梅.基于Beacon与微信的室内定位导航系统的研究[J].物联网技术,2018,8(6):36-38.
