离子推力器栅极组件热态间距测量系统研制*
2020-02-07袁杰红周仕明肖势杰李兴坤杨俊泰
袁杰红,梁 栋,周仕明,肖势杰,李兴坤,杨俊泰
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073;2. 兰州空间物理技术研究所真空低温技术与物理国家级重点实验室, 甘肃 兰州 730030)
LIPS-300是兰州空间技术物理研究所自主研制的一款直径为300 mm的高功率、高推力、多模式栅极离子推力器,专为中国新一代大型桁架式卫星平台设计。栅极组件是栅极离子推力器的关键部件,LIPS-300栅极组件为三栅极结构,由三片球面多孔栅极组成,栅极通过安装环固定在总环上,室温下栅极安装间距为1.25 mm。离子推力器电离室工作后,来自电离室的热辐射和等离子的能量沉积会迅速加热栅极,并且使栅极中心温度高、边缘温度低,温度场沿栅极径向对称,近似成二次曲线分布[1](屏栅中心温度可达400~500 ℃,边缘温度比中心低100~300 ℃[2])。栅极受热膨胀,内部产生弯曲应力和拉伸应力导致球面结构产生变形,其一阶热变形固定为沿球半径向外突出,在栅极中心处产生最大热变形[3]。工作时,屏栅中心的温度比加速栅中心温度高50~100 ℃[2],屏栅热变形量大于加速栅变形量,导致栅极热态间距减小。栅极间距减小将影响离子束流的发散角、推力大小,增大电子返流阈值、加重栅极腐蚀[4-6],更严重的是会增大栅极打火概率,甚至接触短路导致推力器关机[7-8]。所以需要对栅极热态间距的变化量进行测量,掌握其变化规律,在国外,美国国家航空航天局(National Aeronautics and Space Administration, NASA)的MacRae[9]利用带探头的高精度步进电机,通过接触测量了双栅极的热变形,测量精度为25 μm。美国喷气推进实验室的Trava-Airoldi[10]设计了一种基于氦氖激光的光学系统测量900系列栅极组件热变形。美国航空航天公司的Pollard[11]在推力器侧前方放置镜子,通过远距显微镜拍摄镜子的反射成像,测量了T5离子推力器栅极的热变形量。但是以上方法均存在缺陷,MacRae的接触测量方法无法在束流状态下测量,Trava-Airoldi的氦氖激光测量方法对镜头的要求十分苛刻,且对环境振动十分敏感,Pollard的方法通过角度变化计算栅极间距精度较低。基于对以上问题的改进,NASA的Soulas[12]使用远距显微镜配合螺栓固定的探针测量了栅极的热变形,该测量方式可在开启束流的情况下运行,成功测量了美国宇航局太阳能推进技术应用准备计划(NASA Solar electric propulsion Technology Applications Readiness program, NSTAR)推力器工作时钛栅极组件的热变形及热态间距。NASA的Diaz[13]对NSTAR推力器的钼栅极组件进行了热变形测量,使用了Soulas的测量方式,并将两者结果进行了对比,测量效果良好,但Soulas的方法无法测量三栅极组件的热态间距,而且固定探针的螺钉头突出到屏栅和加速栅之间,占用了约0.28 mm的栅极间距,从测量结果分析其精度不超过25 μm。总的来看,离子推力器栅极热态间距的测量是十分困难的,离子推进器在伴随有高温和等离子体的真空环境中工作,在这种复杂的测量环境下,无法使用常见的接触测量方法,云纹和散斑等方法也无法满足测量要求。此外,栅极热态间距和栅极热变形很小,因此对测量精度要求高(10-6~10-5m)。在国内,针对栅极热变形,目前仅有学者进行了仿真计算,如孙明明等[14]建立了LIPS-300离子推力器有限元分析热模型,在后续研究中[15-17],对栅极力学性能参数进行等效,建立了栅极的等效无孔平板模型,仿真了栅极边缘有约束和无约束两种情况下的栅极热变形,并对30 cm离子推力器三栅极组件工作时的热变形量进行了模拟计算。但尚缺少有效的栅极热态间距变形测量系统,为此,本文设计了一套栅极组件热态间距测量系统,改进Soulas的探针法,使用高温结构胶固定探针避免了使用螺栓固定探针产生的影响,提出可检测三栅极组件热态间距的探针安装方案,利用远距显微镜获取探针的高分辨率图像,基于摄像测量原理[18-19]利用亚像素定位方法提高测量精度,结合图像处理算法完成图像实时标定和校正,基于MATLAB2017b开发软件实现了栅极组件中心位置热态间距的高精度、非接触在线测量。
1 测量系统
1.1 系统组成
系统由实验台、光源、栅极组件、加热装置、探针、合作标志、远距显微镜、CCD相机、高精度4轴定位平台和测量软件组成,如图1所示。

图1 栅极组件热态间距摄像测量系统示意图Fig.1 Ion optics hot gap measurement system
栅极组件通过夹具固定在实验台上,与地面保持垂直。探针及合作标志固定在栅极中心。LED调焦摄像灯作为光源,其色温调焦范围为3200~5600 K,光线角度调节范围为15°~55°,安装于栅极组件侧方。远距显微镜选用Navitar 12x变焦镜头系统。电荷耦合器件(Charge Coupled Device, CCD)相机图像分辨率为1600 pixel×1200 pixel,感光芯片尺寸为1/2.5″,芯片像元大小为2.8 μm×2.8 μm,每秒可采集12帧图像。镜头和相机安装在高精度4轴定位平台上(3个平移自由度x,y,z;1个转动自由度θZ),调整相机位置和角度使相机光轴和栅极组件的纵轴线垂直(位移台精度5 μm,旋转台精度0.1°)。加热装置由一个2.5 kW的环型加热器和移动装置构成,预热之后,移动至屏栅后方1 cm处进行加热,环形加热器中心和栅极的中心对齐,环形加热器的构型可以近似在栅极上施加一个中心温度高边缘温度低的温度场,模拟推力器点火后产生的径向温度场。测量软件基于MATLAB2017b开发,由标定模块、在线测量模块、离线测量模块及数据显示保存模块构成。
本系统在真空中运行时,摄像灯以及相机等设备均位于栅极的羽流区外,避免离子束流和栅极表面高温直接对设备测量造成影响,同时用锡箔纸、石英玻璃片对设备和镜头进行保护,防止环境中高速离子的溅射腐蚀,保证了设备在真空、高温和等离子环境下长时间正常工作。
1.2 测量方法
本文设计了一种在不影响栅极间距的情况下对三栅极组件热态间距进行测量的方法。如图2所示,将两个氧化铝探针用高温结构胶和高温陶瓷胶分别固定到屏栅和加速栅的中心孔中。并在探针和减速栅极上用高温陶瓷胶固定圆形合作标志,用于亚像素定位提高测量精度。为了便于安装,探针分为两段直径,加速栅探针底部直径为1.8 mm,可以穿过屏栅孔(1.9 mm)但无法穿过加速栅孔(1.25 mm)。而屏栅探针底部直径为2.2 mm,无法穿过屏栅。第二段直径均为 0.8 mm 均可以从减速栅中探出。圆形合作标志为直径1.5 mm的氧化锆圆球。
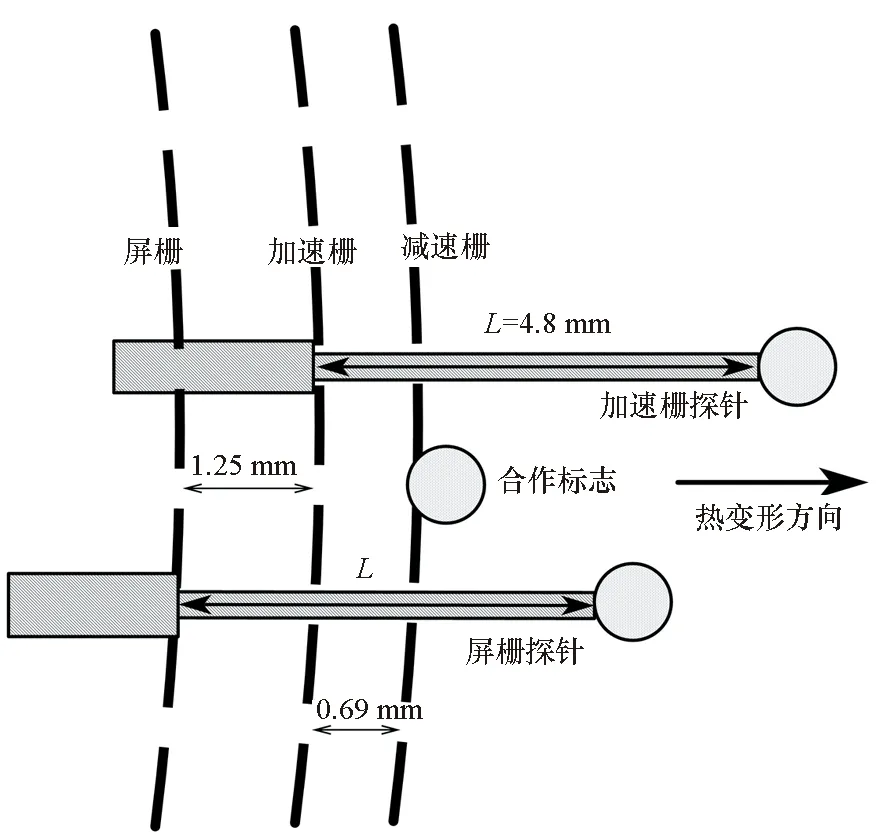
图2 探针及合作标志安装示意图Fig.2 Cooperation logos installation
通过探针和栅极的位移来间接测量栅极热态间距以及变形量。远距显微镜通过4轴高精度定位平台安装在栅极组件的侧方,调整定位平台和显微镜,将探针及合作标志成像在视场的中央。图像中三个圆形合作标志的水平方向位移分别代表屏栅加速栅和减速栅中心的变形量,其差值为栅极间距的变化量。工作时,远距显微镜采集图像序列实时传送到计算机,合作标志的边缘像素由分区Canny边缘检测提取。基于合作标志的边缘像素,利用最小二乘法对圆心的坐标进行拟合,高精度测量合作标志位移,同时对图像进行校正和放大系数标定。本文开发的数字图像处理软件集成了图像处理和计算功能,可实现栅极热变形量和热态间距变化的在线检测和输出。
2 关键算法
对合作标志的定位及其位移的检测是本测量方法的核心问题。对图像的预处理保证了合作标志边缘检测的稳定性,利用最小二乘法拟合圆心位置进行亚像素定位,通过图像畸变校正、图像放大系数标定保证热态间距测量的精度。
2.1 合作标志定位
Canny算子[20]在固定的参数下无法精确检测出同一图像中多个与背景对比度不同的物体边缘。本文将视场划分为上、中、下三个部分,加速栅的合作标志位于上部区域,减速栅合作标志位于中部区域,屏栅合作标志位于下部区域,每个区域里的只有单一的检测元素,由此便能针对单一元素用Canny算子进行不同参数的高斯滤波、双阈值处理的边缘检测,根据检测结果分别调整每个区域的高斯函数标准差σ和高低阈值TL、TH,使三个区域均达到最佳的边缘检测效果。基于Canny算子的分区边缘检测得到了圆形合作标志清晰的边缘像素,精度达到了整像素级。为了提高合作标志的定位精度,提取球形合作标志的边缘像素点,将每一点像素的坐标代入标准圆方程,利用最小二乘法联立方程组解出圆方程,计算圆心坐标和半径值,基于圆心坐标定位合作标志,精度达到亚像素级。如图3所示。
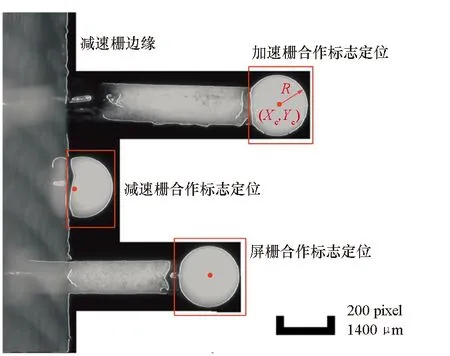
图3 合作标志亚像素定位Fig.3 Cooperation logos subpixel positioning
2.2 图像放大系数标定
放大系数是影响摄像测量精度中的关键参数,图像中物体的像素大小乘以放大系数后转化为世界中物体的实际大小,放大系数标定的误差在测量结果中将成百上千倍地放大。要达到高精度测量,必须要对摄像系统进行高精度标定。
(1)

在n=100帧图像上分别拟合合作标志的半径值并以A类不确定度评定像素半径测量结果,在P=0.954的置信水平下,由式(2)计算像素半径rpixel=106.914±0.02 pixel。
(2)

由不确定度传递公式(见式(3))计算放大系数为λ=7.019 4±0.001 62 μm/pixel。
(3)
通过比较可知,棋盘格和合作标志标定结果基本一致,误差最大为0.012 2 μm/pixel,合作标志标定流程简单,可在测量的同时进行标定,适用性更强,但是存在光源干扰合作标志边缘检测值的误差,故有必要在测量之前用棋盘格标定进行验证。进一步减小误差可采用更高精度的标定板,减少自身尺寸的不确定度。此处未对图像进行切向和径向畸变校正,由于镜头制作工艺提升切向畸变可忽略,径向畸变主要存在于图像边缘区域,图像中部的径向畸变很小也可忽略。
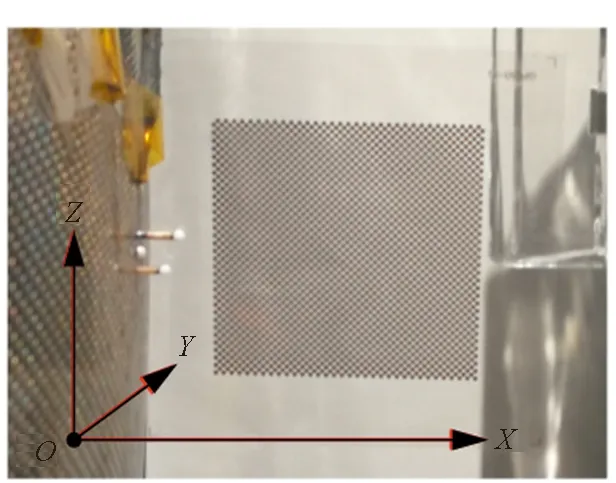
图4 图像放大系数标定Fig.4 Calibration board installation
2.3 相机坐标系与探针坐标系的校正
若由于相机或栅极组件安装时产生角度误差,使相机坐标系和探针坐标系的X方向坐标轴互相之间不平行,那将导致合作标志的位移方向与摄像机光轴不垂直,对测量结果造成影响。如图5所示,若位移方向向内偏移角度为α,则圆形合作标志移动前后的半径r1,r0会出现图中的误差Δ=r1-r0,此时合作标志的横向位移将出现误差Δd。
(4)
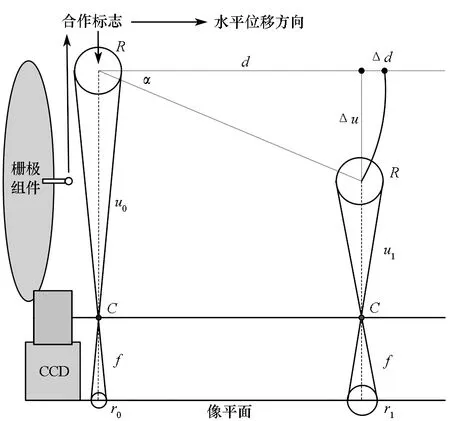
图5 相机与探针坐标系角度校正Fig.5 Coordinate system angle correction
可求解偏移角度α,通过角度投影变换,将合作标志位移方向校正成与摄像机光轴垂直的情况,消除坐标系角度带来的误差。
(5)
坐标系角度的偏差对测量精度的影响较小。根据式(4)可知,偏角α造成的误差为:α=1°时,误差约为d×0.015%。在实际测量中偏角α一般可以控制在1°以内,故坐标系角度对测量精度的影响不大。
3 实验
3.1测量精度验证


图6 移动100 μm的像素位移量测量结果Fig.6 Pixel displacement measurement results after 100 μm movement
影响系统测量精度的因素主要有放大系数的标定、坐标系角度的校正、探针及合作标志的热稳定性,前两者已在第2节进行了分析。探针与合作标志是本方法测量变形的参考物,要保证其在高温环境下稳定,自身不发生变形和位移,牢固黏接在栅极上,如果其自身发生变形将直接影响测量精度。所以在材料的选择上,应与栅极具有近似热膨胀系数,减少热变形不一致的影响(见表1)。
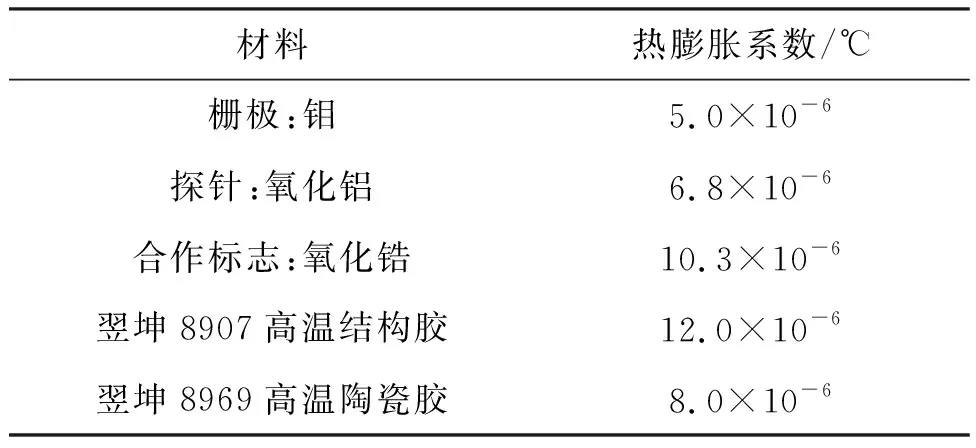
表1 探针及高温胶的热膨胀系数
利用线膨胀公式计算高温下探针的最大轴向伸长量用于估计探针自身变形带来的影响。
δ=α·L·ΔT
(6)
由图2所示,探针的计算长度为4.8 mm,由于栅极间温度差异较大,需要分段计算探针在不同区域间的热膨胀量。实验中室温30 ℃,屏栅最高356 ℃、加速栅最高238 ℃、减速栅下游估计最高为138 ℃,计算结果为加速栅探针最大伸长3.9 μm,屏栅探针最大伸长5.8 μm。
同时在450 ℃高温下进行耐热实验,加热-冷却循环冲击5次,在实验过程中没有发现探针、合作标志变形、脱落的现象,探针在冷却后可恢复到原位。综合考虑,影响系统测量精度最主要的因素是图像放大系数的标定误差以及探针自身的热变形。对比美国NASA的MacRae变形测量精度(25 μm),本文测量系统在非加热状态下测量精度优于6 μm,需要指出位移台的调整精度和测量误差处于同一级别对精度验证造成影响,系统实际测量精度应优于6 μm。考虑到探针的最大热膨胀为5.8 μm,故在加热状态下测量精度优于12 μm,比NASA测量精度高52%。
3.2 大气环境下加热实验
实验LIPS-300栅极组件具有三层球面栅极,由内至外分别是屏栅、加速栅及减速栅,加速栅和屏栅的间距为0.9 mm,本实验件未加装减速栅。实验在大气环境中进行,加热热源为2.5 kW的径向加热器,沿径向在加速栅和屏栅分别黏接5个K型热电偶测量温度,如图7所示。远距显微镜通过4轴精密定位平台安装在栅极侧方。为了检测实验台在加热过程中是否出现热变形,在栅极边缘与型材架的固定位置处使用千分表进行位移检测。整个测量系统如图8所示。

图7 热电偶安装位置Fig.7 Thermocouples installation
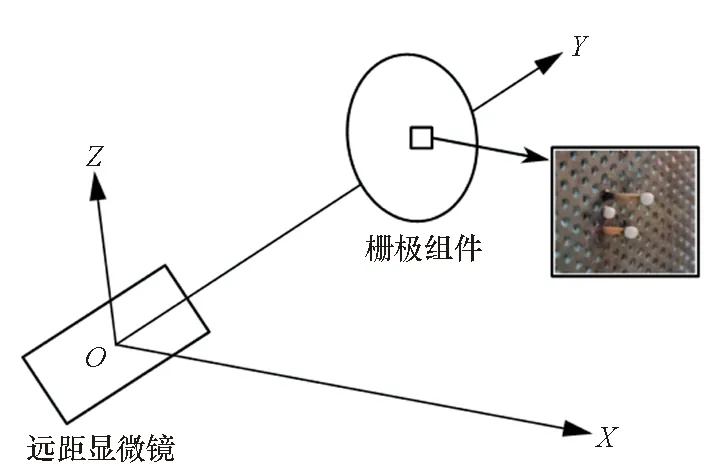
图8 大气环境下LIPS-300热态间距测量实验Fig.8 Hot gap measurement experiment
室温30 ℃开启检测系统后,第30 s开始加热,第573 s停止加热开始冷却,第2050 s结束测量。整个实验过程中屏栅和加速栅的温度如图9所示,加热初期1 min内温度变化率最大,加热4 min 后温度基本稳定,加热器模拟了沿径向分布的温度场。实验整个过程中屏栅和加速栅的热变形数据以及热态间距变化量如图10所示,开始加热后的1 min内随着温度快速升高,屏栅和加速栅迅速产生变形,其中屏栅变形明显大于加速栅,在屏栅和加速栅温差最大150 ℃时,栅极间距最大减小413 μm(约定为屏栅变形量减去加速栅变形量)。加热1~4 min期间,温度仍在上升但速率明显下降,屏栅和加速栅分别达到各自最大变形量为859 μm和548 μm。加热4 min后随着栅极温度趋于稳定,屏栅和加速栅的变形量逐步回落至690 μm和331 μm,屏栅中心温度稳定为356 ℃,加速栅中心温度稳定为238 ℃。第573 s移开加热器开始冷却,温度快速下降,屏栅和加速栅变形迅速减小并产生负值,最大达-260 μm。随着冷却过程栅极变形和间距缓慢回复,在第2050 s实验结束时,热变形和间距变化量基本回复到零,温度回到室温30 ℃。实验中圆形合作标志半径无明显变化,故α修正角取零。图像放大系数标定为7.00 μm/pixel。千分表示数值无明显变化。
从实验结果可知栅极热变形具有以下特点:
1)栅极间距的变化量取决于两栅极的温度差。栅极间的温度差越大,栅极热态间距的减小量越大。栅极间距的最小值出现在加热初期,此时屏栅和加速栅的温度差最大,随后温度差减小时,间距量也随之回升。
2)在加热初期栅极温度迅速变化时,栅极产生剧烈变形,当温度趋于稳定时,变形量将缓慢减小到稳定值。停止加热开始冷却时,温度迅速减小,栅极变形也会迅速下降并产生负位移现象,等待栅极完全冷却后,栅极变形量缓慢回到零位。其他真空环境实验[9, 12-13]也具有上述变形特点。Rawlins等[22]指出栅极组件中的球面栅极和栅极安装环都会产生变形,球面栅极受热膨胀使栅极中心的拱高增大,栅极固定环受热膨胀使栅极中心拱高减小。所以栅极达到最大热变形后,在温度维持不变的情况下,热变形量逐渐减少的原因是栅极安装环及其周围区域的温度上升慢,热容量大导致其热变形滞后于栅极。当栅极球面产生变形后,安装环温度才慢慢升上来,并产生一个径向变形,径向热应力将栅极球面向四周拉扯,导致球面拱顶高度减少,由此产生热变形曲线逐渐下降的现象。对于在冷却时出现栅极负位移的现象,实验中测量试验台位移的千分表无明显变化,说明栅极负位移现象不是试验台变形引起,而是栅极组件冷却时产生了负向位移。所以同理栅极组件在空气中冷却时,带孔栅极比栅极固定环温度下降快,首先回复变形,而栅极固定环的变形回复慢,所以出现栅极负向变形现象。

图9 栅极温度测量结果Fig.9 Grids temperature during the test

图10 LIPS-300栅极组件热态间距及热变形量测量结果Fig.10 LIPS-300 ion optics hot gap and thermal deformation measurements
4 结论
本文基于国内栅极热态间距测量需求开发了一种栅极组件热态间距摄像测量系统。结论如下:
1)测量系统满足在真空、高温、等离子环境下对栅极变形进行实时检测的要求,也可基于拍摄的视频调整参数进行离线检测,同时适用于双栅及三栅结构的栅极组件热态间距的测量。
2)系统采用可灵活修改参数的人机界面检测多目标的边缘并采用最小二乘法对合作标志进行亚像素定位,提高测量精度。精度验证实验结果表明,在非加热状态下系统测量误差优于6 μm,在加热状态下考虑探针热膨胀,系统测量误差优于12 μm,比美国NASA的MacRae接触式变形测量方法精度高52%。
3)分析了影响系统测量精度的影响因素。用两种方法对比验证图像放大系数的标定、对相机和探针的坐标系角度校正、对探针及合作标志的耐热性和热膨胀量进行测试计算,分析得影响系统测量精度的主要因素为图像放大系数的标定误差以及探针自身的热膨胀。
下一步将对离子推力器栅极组件在真空中运行时进行热态间距实测。同时研究等离子体束流光强对摄像测量的影响,以及离子溅射腐蚀对探针的影响。并计划采用石英材料的螺纹或楔形卡口探针安装固定,以及采用更高精度的平移台和标定片来提高测量精度。
