基于模块化多电平换流器拓扑的静止同步补偿器非线性控制策略
2020-02-04葛贤军
邢 勐, 顾 明, 葛贤军
(1.中国石油化工股份有限公司炼油事业部, 北京 100728; 2.中国石油化工股份有限公司广州分公司, 广州 510725; 3.清华大学电机系电力系统及发电设备控制和仿真国家重点实验室, 北京 100084)
传统基于电压源型换流器的静止同步补偿器(static synchronous compensator,STATCOM)工程大多采用全控型电力电子器件串联,具有换流器结构复杂与可靠性低等缺点,而模块化多电平换流器适用于高压大容量的场合、具有很强的可扩展性、输出波形良好等有点,提高了系统的可靠性和稳定性,得到了越来越多的工程应用。
目前,相关的功率拓扑和新型控制策略[1-5]已经应用在各个领域。对于MMC-STATCOM的研究主要集中于模块化多电平换流器(modular multilevel converter,MMC)拓扑结构与底层调制策略[6-7]、STATCOM的控制策略[8-11]、STATCOM的不平衡治理分析[12]、MMC-STATCOM工程应用[13]等诸多方面。文献[8]利用内模原理设计了MMC-STATCOM电流环的内环解耦控制器,并通过仿真表明了控制策略的良好特性。文献[9]提出了MMC-STATCOM的模型预测控制策略,但对于MMC-STATCOM非线性、强耦合的系统,模型预测优化控制策略还有待深入。文献[10]提出了传统MMC-STATCOM的双环PI控制策略,但PI控制具有参数不易调试、动态响应慢、稳定运行区间受限等缺点。文献[11]建立了MMC-STATCOM的数学模型并提出了下垂控制策略,仿真结果验证了该控制策略的有效性。文献[12]提出了基于PR控制器的不平衡控制,仿真结果表明可以实现无静差控制。文献[13]以实际工程为例,表明了STATCOM可以对电网进行无功补偿和母线电压支撑的作用,有利于电网安全运行。
无源控制是一种基于能量观点的非线性控制策略,具有鲁棒性强、系统结构简单、易于实现等优点。提出了无源滑模非线性控制策略,即内环为电流无源滑模变结构控制,外环为PI控制,使得控制系统对外部扰动及内部参数的变化具有很强的鲁棒性和抗干扰能力,从而改善控制质量。
通过分析MMC-STATCOM的拓扑与数学模型,建立相应的无源滑模控制器。在MATLAB/Simulink中搭建21电平MMC-STATCOM仿真模型,仿真结果表明,所提出的控制策略具有良好的动态响应和控制性能。
1 MMC-STATCOM Euler-Lagrange数学模型
基于MMC的STATCOM的拓扑结构如图1所示,其中MMC子模块SM(sub module)一般采用半桥结构。
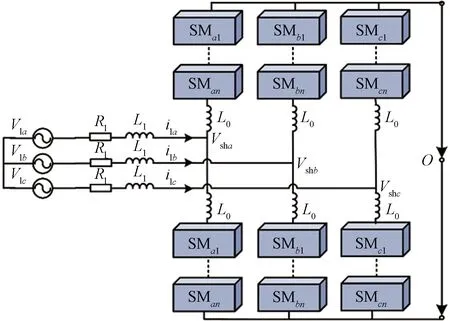
图1 MMC-STATCOM的拓扑结构Fig.1 Topology of MMC-STATCOM
在三相静止坐标系下MMC-STATCOM的数学模型为
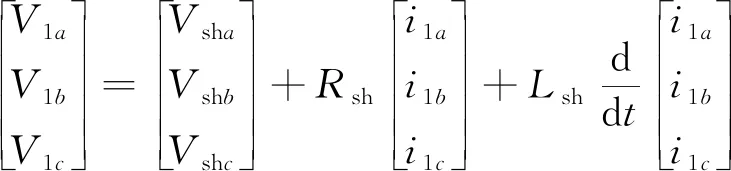
(1)
式(1)中:V1j为交流系统侧交流电压;Vshj为MMC侧输入电压;i1j为MMC侧输入电流;Rsh=R1+R0/2、Lsh=L1+L0/2分别为MMC的等效阻抗j=a,b,c。
将式(1)在同步旋转坐标系下进行变换,可得到同步旋转坐标系下MMC-STATCOM数学模型为
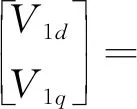
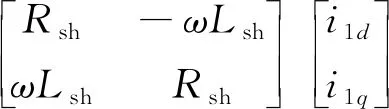
(2)
式(2)中:V1d和V1q分别为交流系统侧电压的d、q轴分量;i1d和i1q分别为MMC输入电流的d、q轴分量;Vshd和Vshq分别为MMC侧电压的d、q轴分量。
Park变换矩阵为
Tabc-dq(θ)=

(3)
由式(2)可得MMC-STATCOM的Euler-Lagrange(EL)数学模型矩阵形式,即

(4)
2 MMC-STATCOM的无源滑模控制器设计
当MMC-STATCOM系统正常运行时,系统期望的稳定运行点等于给定值,即

(5)
系统的误差为xe=x-x*,无源控制器实现xe=0。由MMC的Euler-Lagrange数学模型[式(4)]可得到EL误差模型:

(6)
MMC-STATCOM的能量存储函数为
(7)
式(7)对时间t的导数为
R(x*+xe)]
(8)
假定使系统尽快达到稳定平衡点,注入阻尼以提高系统能量平衡度[14]。给MMC-STATCOM注入的阻尼方程为
Rdxe=(R+Ra)xe
(9)
式(6)可改写为

(10)
为了实现解耦控制,根据式(10)选取无源控制律为

(11)
将式(11)代入式(8)可得

(12)
由式(12)可以得到,在控制律[式(11)]的影响下,能量存储函数H(x)趋近于0。
将无源控制律式(11)代入式(6),可得

(13)
式(13)表明,无源控制律可实现MMC动态解耦。
根据式(11),可得到MMC-STATCOM的d-q轴无源控制律为

(14)
选取MMC-STATCOM系统的滑模面,其表达式如下:
(15)
式(15)中:kp1、ki1、kp2、ki2为滑模表面控制系数,且控制系统误差为

(16)
利用饱和函数来减小滑模控制的抖动[15]。选取指数趋近律,即

(17)
联立式(14)、式(16)与式(17)得到MMC-STATCOM系统的无源滑模控制律为
(18)
MMC-STATCOM的控制策略采用了定直流电压和注入无功功率控制,无源滑模控制框图如图2所示。其中,dq/abc表示旋转坐标系下的dq分量转换为三相静止直角坐标系下的abc分量。
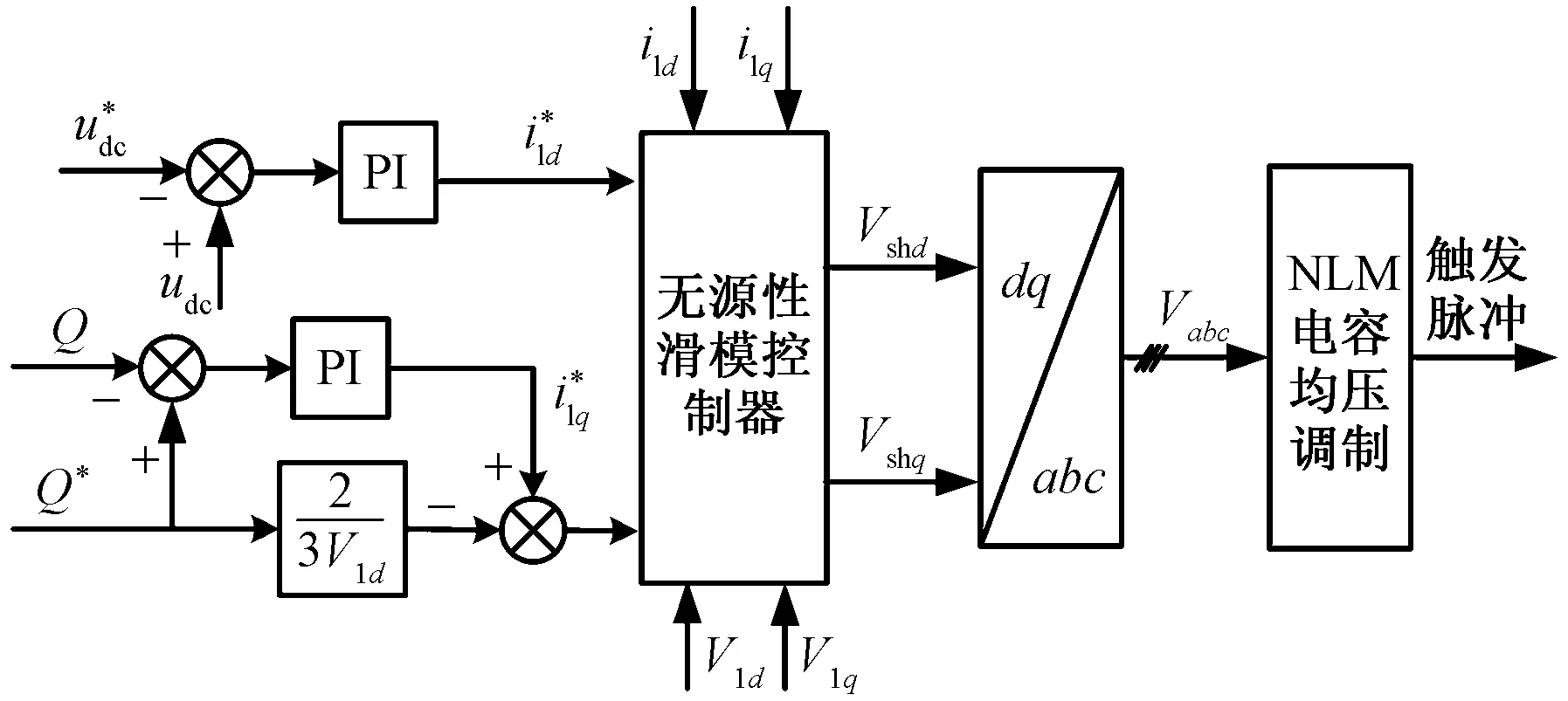
图2 MMC-STATCOM无源滑模变结构控制框图Fig.2 Passive sliding mode control block diagram of MMC-STATCOM
3 仿真验证与分析
基于MMC-STATCOM所提策略的可行性,在MATLAB/Simulink中搭建了21电平MMC-UPFC的仿真系统,具体参数如表1所示。
表1 MMC-STATCOM参数
3.1 最近电平逼近调制策略仿真
最近电平逼近调制(nearest level modulation, NLM)是通过利用最接近的电平近似逼近正弦调制波,NLM适用于MMC子模块数较多的场合,一般达到几十或数百个。最近电平逼近调制策略仿真波形如图3所示。阶梯电压波的阶梯数即为桥臂的子模块导通个数。
3.2 直流侧电压控制策略仿真
MMC-STATCOM采用了定直流电压的控制策略(图2)。将直流侧电压采样值与参考值的偏差送入外环PI控制器,实现直流侧电压的精准控制。
如图4所示为MMC-STATCOM直流侧电压Udc波形,Udc基本稳定在41.6 kV且直流侧电压上下波动±300 V,直流侧电压超调量为0.72%。证明了定直流电压控制策略的有效性。

图3 最近电平逼近调制策略波形图Fig.3 Waveform of NLM strategy
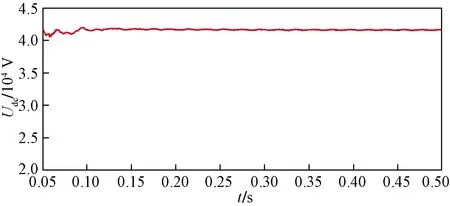
图4 MMC-STATCOM直流侧电压响应曲线Fig.4 MMC-STATCOM DC-side voltage response curve
3.3 MMC子模块电容均压控制策略仿真
采用基于快速排序的子模块电容电压平衡策略,将最近电平调制策略作为底层驱动,以实现MMC子模块均压控制。MMC子模块电容电压波形如图5所示,子模块电容电压基准值为2.08 kV,波动值约为±40 V,符合子模块电容电压波动要求,说明基于快速排序的子模块电容电压控制策略能够有效地均衡MMC子模块电容电压。
3.4 交流侧无功功率控制策略仿真
仿真结果如图6所示,系统能够迅速对功率变化做出响应, 瞬间将无功功率稳定在新的无功功率设定值,说明MMC-STATCOM在无源滑模控制策略下能够响应系统指令,进行相应无功功率补偿,从而实现动态无功支撑。
为了观察MMC-STATCOM换流器三相输出电压、电路波形,取0.2~0.4 s中10个周期波形,如图7、图8所示,MMC-STATCOM换流器设备可正常运行。
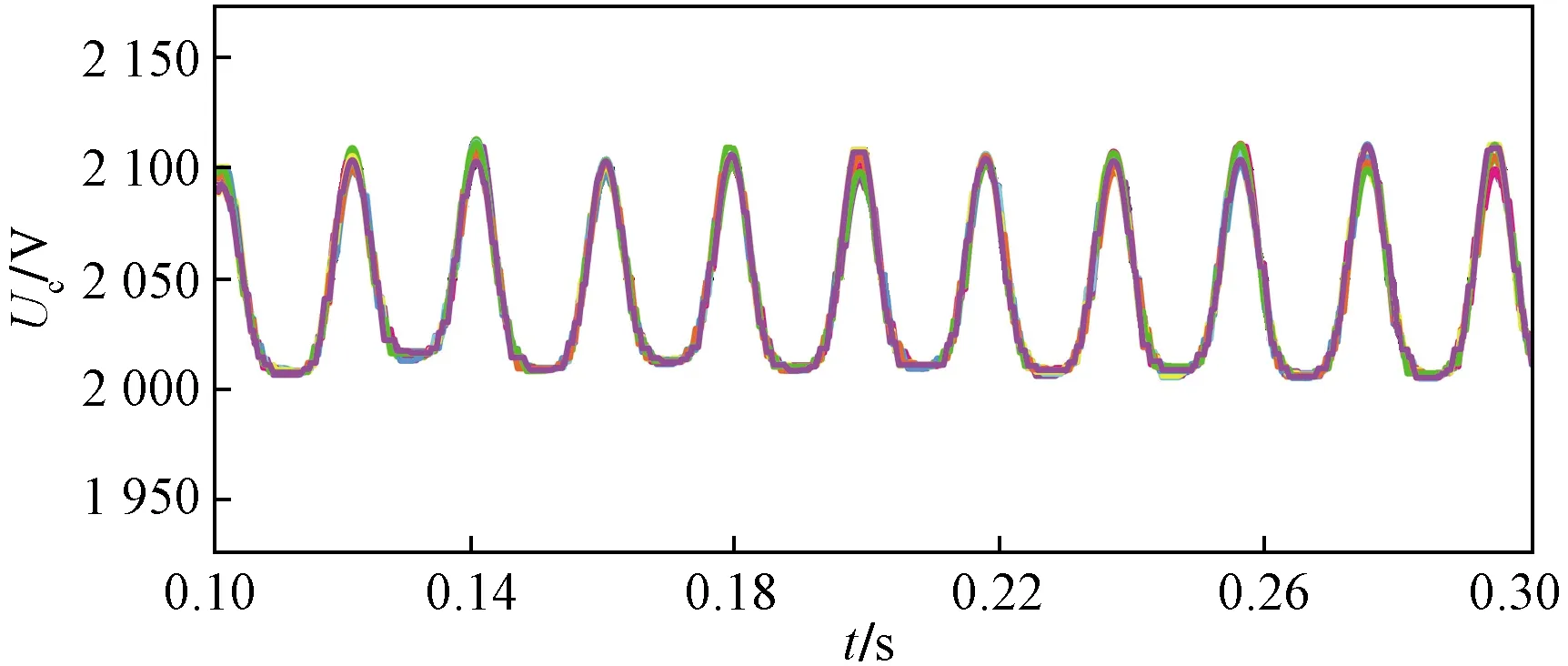
图5 MMC子模块电容电压波形Fig.5 Capacitor voltage waveform of MMC submodule

图6 MMC-STATCOM无功功率控制仿真波形Fig.6 Simulation waveform of reactive power control of MMC-STATCOM

图7 MMC-STATCOM输出电压波形Fig.7 MMC-STATCOM voltage output waveform
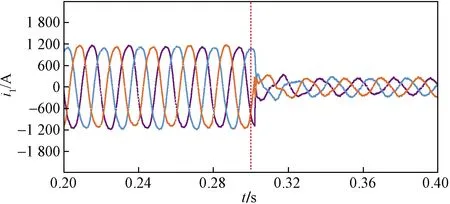
图8 MMC-STATCOM输出电流波形Fig.8 MMC-STATCOM current output waveform
4 结论
通过对MMC-STATCOM进行数学建模,结合无源控制与滑模控制二者的优点,提出了无源滑模控制策略,并通过MATLAB/Simulink搭建21电平的MMC-STATCOM仿真系统。仿真结果表明无源滑模控制具有良好的动态响应与稳态特性,验证了所提策略的有效性与正确性。
