基于DATCOM承载电动无人机纵向稳定性和操纵性
2020-02-03杨凤田周文雅
张 磊, 杨凤田, 周文雅, 黄 俊
(1.沈阳飞机设计研究所, 沈阳 110135; 2.沈阳航空航天大学辽宁省通用航空重点实验室, 沈阳 110136; 3.辽宁通用航空研究院, 沈阳 110136; 4.大连理工大学航空航天学院, 大连 116024; 5.北京航空航天大学航空科学与工程学院, 北京 100191)
随着航空技术的发展,无人机越来越多地受到各国的重视,无人机具有使用范围广、应用限制少、经济性好等优点[1-2]。在无人机初步设计阶段,对设计周期要求严格[3],需要快速计算无人机的气动特性参数,来分析无人机的稳定性和操纵性,以及无人机起飞爬升、降落巡航等飞行性能[4],并为下一步设计无人机飞行控制系统提供参考数据[5]。在设计无人机飞行控制系统前,需要将无人机升力、阻力、俯仰力矩等气动系数代入运动方程,分析稳定性和操纵性,进而设计飞行控制规律,因此快速计算无人机气动特性参数并得到线性化方程至关重要。但计算流体力学(computational fluid dynamics,CFD)软件计算量较大,风洞实验成本较高,这就需要一款能够具有较好准确性、较高计算速度的气动计算软件。DATCOM程序采用了美国近几十年来的气动试验数据,适用于大多数常规布局飞行器,具有计算快速、适应性强的优点[6]。文献[7-8]将DATCOM软件计算得到的气动参数和风洞实验数据进行了比较,表明使用DATCOM软件可以得到较准确的气动参数。因此采用美国气动力工程估算程序DATCOM估算无人机气动系数[9]。
DATCOM计算程序包含大量美国飞机飞行试验数据和图表公式,适用于大多数常规布局飞机,对于飞翼布局飞机,也可通过一定技巧组合计算。DATCOM程序有四大类输入参数:Ⅰ类是飞行条件、Ⅱ类是基本构型、Ⅲ类是附加构型、Ⅳ类是控制参数。根据各个模块要求,输入无人机各项外形尺寸等数据,可以通过NACA系列标准翼型代号定义飞机翼型,也可以通过输入翼型外形坐标点来定义翼型。输入飞机参数后,DATCOM软件能够快速计算出各种气动系数(升力系数、阻力系数、侧力系数、俯仰力矩系数、滚转力矩系数、偏航力矩系数和舵面效率等),并以文本格式输出结果,其中气动系数的单位可以选择公制或英制。DATCOM软件计算速度快,使用简便。
随着无人机飞行环境愈加复杂,各种外界干扰越来越多,更需要关注无人机的稳定性[10-11]。稳定性包括静稳定性和动稳定性,其运动分为纵向运动和横侧向运动。静稳定性是指飞机在平衡状态受到扰动后,飞机操纵舵面不动,飞机本身具有自动恢复到原平衡状态的趋势;动稳定性是指飞机受到扰动后,能逐渐恢复到扰动之前的运动状态。
虽然电动无人机动力系统不消耗燃油,只消耗动力电池电能[12],动力电池质量不会发生变化,其质量和重心在载荷质量固定的情况下不随飞行时间改变,拥有稳定性和操纵性不随飞行时间改变的特点。但现分析的承载电动无人机,任务载荷质量可达到空机质量的5倍,其稳定性和操纵性在承载和空载两种情况下有较大变化,因此需着重对比分析这两种条件下的飞机稳定性和操纵性。
使用CATIA软件计算得到电动无人机的转动惯量和质量重心,使用DATCOM计算安装载荷和空载两种条件下的电动无人机升力系数、阻力系数、俯仰力矩系数、升降舵面效率等参数,使用MATLAB软件将无人机在水平直线飞行状态下配平,并计算得到线性化运动方程,采用SIMULINK软件仿真其纵向稳定性和操纵性,分析加装载荷后,电动无人机纵向稳定性和操纵性的变化情况。
1 运动方程的线性化
采用小扰动法将非线性运动方程简化为线性运动方程进行分析[13-14]。小扰动法是将无人机运动分为基准运动和扰动运动。基准运动一般选择定常直线平飞或定常盘旋等,扰动运动是指在基准运动上施加较小的外界干扰。
线性化方法的假设有:无人机油门固定不变,大气是平静无风状态;基准运动是处于配平条件下的定常直线平飞,无人机受到的扰动是小量;无人机的纵向运动和横侧向运动互不影响。
基于以上假设,结合无人机纵向运动方程,经过简化可得到其纵向小扰动方程为
(1)
(2)
(3)
(4)
式中:V为速度;α为迎角;θ为俯仰角;q为俯仰角速率;δe为升降舵偏角;g为重力加速度;μe为航迹倾斜角;A为状态矩阵;B为控制矩阵[15];E为雅克比矩阵。式中气流坐标轴系内力和力矩的量纲导数定义如下:

2 稳定性理论
(5)
则有
(6)
当Kn>0时,即重心在气动焦点之前,Cmα<0,则在迎角α增大时,负的Cmα将产生低头力矩,使无人机低头,进而减少α,因此无人机是纵向静稳定的。若Kn<0,则Cmα>0,则在α增大时,产生抬头力矩,进而增加α,则无人机是纵向静不稳定的。若Kn=0,则无人机是纵向中立稳定的。
将无人机纵向小扰动方程转化为特征方程,通过求解特征方程的根来分析无人机动稳定性。特征方程形式如下:
D(S)=S4+a1S3+a2S2+a3S+a4=0
(7)
式(7)中:S为纵向运动特征方程的复变量;D(S)为纵向运动的特征多项式;D(S)=0为纵向运动的特征方程。
无人机受到扰动后,其各运动参数随时间的变化,通常由一些典型模态所对应的简单运动叠加而成,通过分析各个典型运动模态特征参数,研究无人机的动稳定性。飞机的模态参数是根据小扰动运动方程的特征根进行计算的。常规布局飞机的特征方程一般有一大一小两对共轭复根,大的对应短周期模态,小的对应长周期模态。动稳定性用飞机运动的特征方程根是否在S平面的左半平面来度量。
3 仿真分析
3.1 无人机基本参数
电动无人机空载时整机质量为3.2 kg,在无人机重心处可均匀放置15 kg质量的任务载荷,承载后气动外形保持不变,重心横向位置保持不变。无人机翼展4.5 m,机身长度2.1 m,飞行高度200 m,由电机及螺旋桨驱动。外形图如图1所示。
图1 无人机外形图Fig.1 The outline drawing of UVA
3.2 纵向稳定性
通过DATCOM软件,计算得到空载时电动无人机静稳定导数Cmα为-0.997 7,由于Cmα<0,说明该无人机是静稳定的。
将DATCOM计算得到的升力系数、阻力系数、俯仰力矩系数、升降舵效参数代入电动无人机非线性运动方程,利用MATLAB软件配平线性化得到线性方程,并计算得到运动特征方程。在给定油门状态下,空载时电动无人机的纵向运动特征方程为
D(S)=S4+20.567 1S3+112.116S2+
39.951 9S+79.563 7=0
(8)
求解纵向运动特征方程,其根为-10.16±1.8i,-0.116±0.86i,由于其特征根均在S平面左半部分,说明其是稳定的。
在给定油门状态下,承载时电动无人机的纵向运动特征方程为
D(S)=S4+16.645 2S3+121.071S2+
15.623 9S+54.774 0=0
(9)
求解纵向运动特征方程,其根为-8.289±7.1268i,-0.0336±0.6762i,由于其特征根均在S平面左半部分,说明其是稳定的。
给空载和承载两种条件下的电动无人机施加小扰动,用Simulink软件仿真得到V、α、θ和q受扰动后的变化仿真曲线,如图2所示。
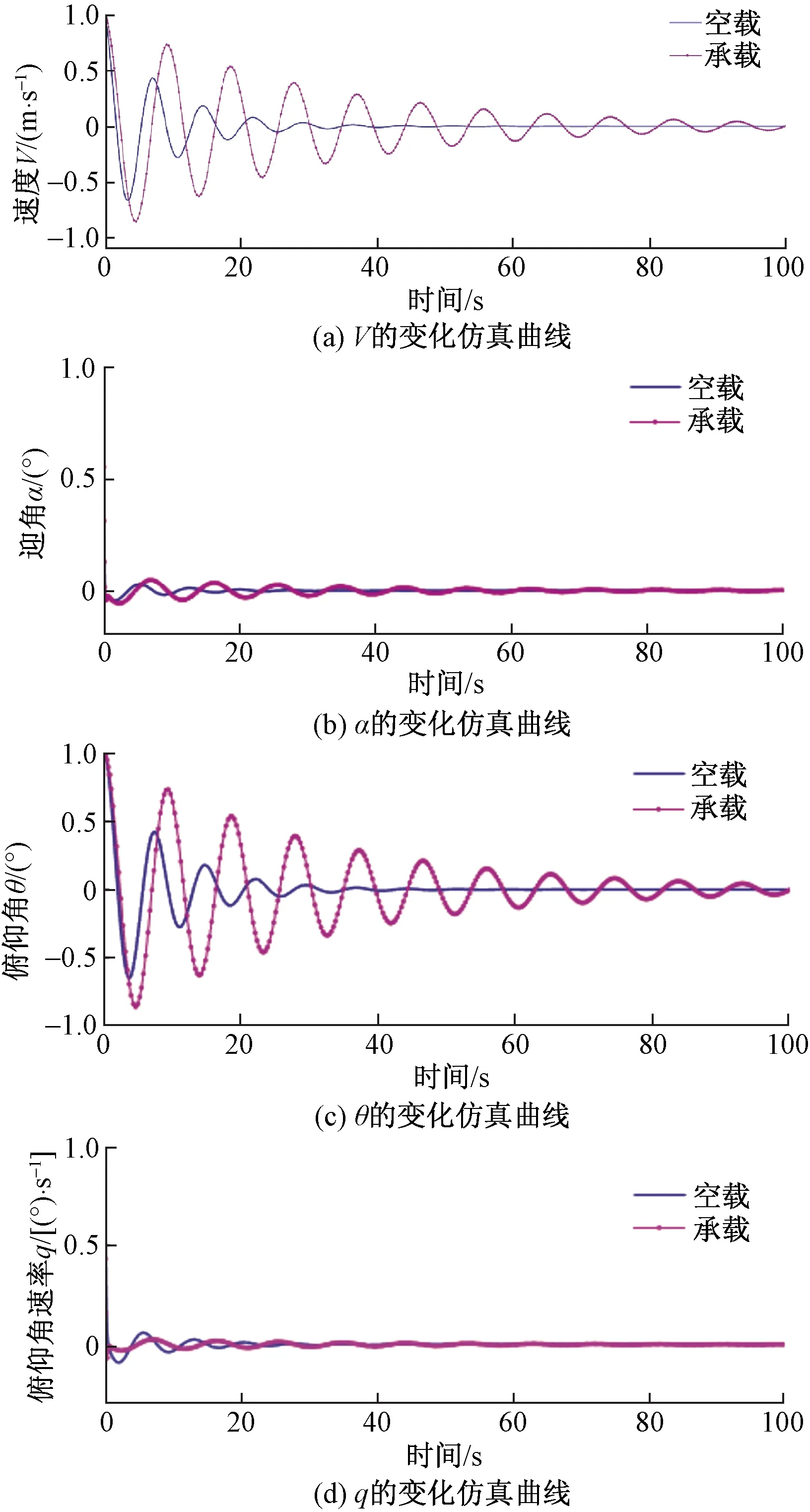
图2 受扰动后V、α、θ、q的变化仿真曲线Fig.2 The simulation curve of V, α, θ and q after disturbance
由图2可以看出,空载时电动无人机的速度和俯仰角变化量经过40 s振荡后趋于零。迎角变化量经过0.3 s急速变小,再经过15 s小幅度振荡后趋于零。俯仰角速度经过0.5 s急速变小,再经15 s小幅度振荡后趋于零。空载电动无人机受扰动后有恢复到原飞行状态的能力。
相同扰动量承载后的电动无人机速度,俯仰角需要经过100 s振荡后趋于零。迎角变化量经过0.25 s急速变小,再经过40 s小幅度振荡后趋于零。俯仰角速度经过0.25 s急速变小,再经过40 s小幅度振荡后趋于零。承载荷后电动无人机受扰动后也有恢复到原飞行状态的能力。
承载后电动无人机速度和俯仰角在扰动后恢复时间为空载时的2.5倍,承载后电动无人机的迎角和俯仰角速度快速下降时间略有减少,小幅度振荡的恢复时间为空载时的2.7倍。
空载时电动无人机XV为-0.209 1,承载后的XV为-0.087 6,空载时是承载后的2.4倍。由于该项表明速度扰动量为正值时,产生负的速度增量,抑制速度增加。空载时小特征根的实部为-0.116,虚部为±0.86,承载后为-0.033 6,虚部为±0.676,空载时实部是承载后的3.45倍,虚部相差不大。承载后的电动无人机在发生速度扰动后,速度振荡恢复趋于零的时间为空载时的2.5倍,近似与空载时的XV和承载时的XV的比值一致,即速度扰动后恢复时间与XV正相关。
空载时Zα/V为-13.788 5,承载时Zα/V为-5.777 3,空载时是承载时的2.4倍。该项表明迎角扰动量为正值时,产生负的迎角增量,抑制迎角增加。空载时大特征根的实部为-10.16,虚部为±1.8,承载后为-8.289,虚部为±7.12,承载时虚部是空载后的4倍,空载时实部是承载后的1.4倍。承载后的电动无人机在发生迎角扰动后,迎角振荡恢复趋于零的时间为空载时的2.7倍,近似与空载时的和承载时的Zα/V的比值一致。即迎角扰动后恢复时间与Zα/V正相关。
3.3 纵向操纵性
施加1°升降舵舵偏角后,V,α,θ和q的变化仿真曲线如图3所示。
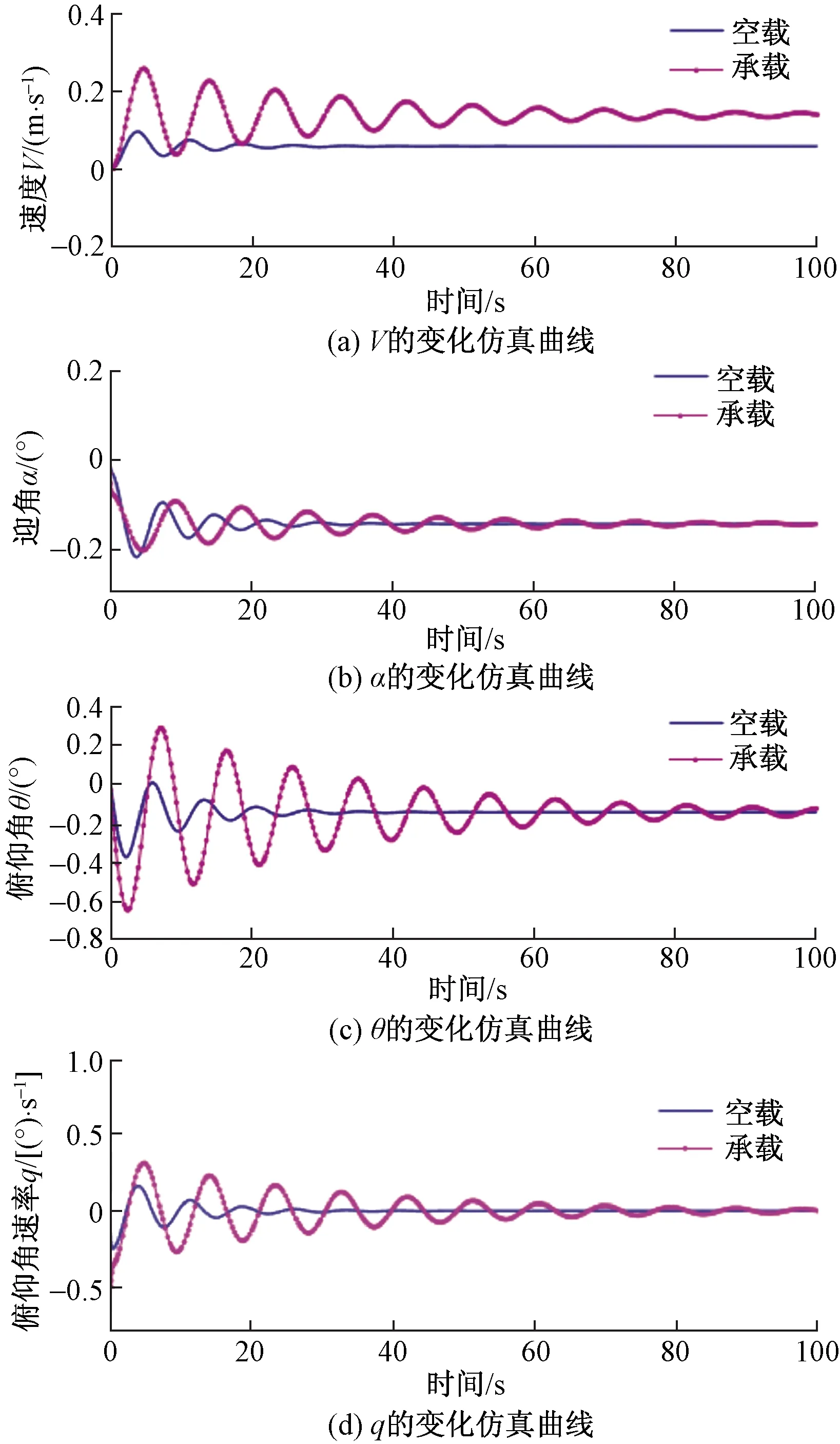
图3 施加1°升降舵的V、α、θ和q的变化仿真曲线Fig.3 The simulation curve of V, α, θ and q after 1° elevator
由图3可以看出,空载时电动无人机升降舵偏转1°,速度最终增加0.06 m/s,迎角减小0.14°,俯仰角减小0.14°,俯仰角速度经过40 s趋于零。
承载后电动无人机升降舵偏转1°,速度增加0.15 m/s,迎角减小0.14°,俯仰角减小0.14°,俯仰角速度经过100 s趋于零。
承载后无人机施加1°升降舵偏角后,迎角、俯仰角变化量与空载无人机相同,承载后速度增加量是空载时的2.5倍,承载后的俯仰角速度恢复为空载的2.5倍。
4 结论
使用DATCOM软件分别计算承载和空载两种状态下电动无人机气动系数,根据小扰动理论,将其非线性运动方程转化为线性方程,使用MATLAB软件进行仿真,得到以下结论。
(1)空载和承载电动无人机均具有纵向静稳定性和动稳定性,均具有良好操纵性。
(2)在电动无人机受扰动时,承载后速度的恢复时间为空载时的2.5倍,与XV正相关;迎角的恢复时间与Zα/V正相关。电动无人机升降舵偏转相同角度时,承载后速度增量是空载时的2.5倍,迎角变化量基本相同。
(3)提出的承载前后的电动无人机的纵向稳定性和操纵性的分析方法,对各种尺寸和重量构型的无人机飞行控制系统初步设计具有重要的参考价值。
