基于墨卡托投影的大圆航段方法
2020-02-03陈金皖张青峰张江勇
陈金皖 张青峰 张江勇
(中国直升机设计研究所 江西省景德镇市 333000)
航路飞行的目的就是从一端飞到另外一端,如何更快更好的飞行是一项重要课题,由于地球的形状与球形相近,墨卡托投影的出现,给航海和飞行带来了巨大的方便,墨卡托投影可以将球形投影成平面图,只要连接两点之间的连线,则可以确定航程及航向,这就是恒向线航线。但是现代社会的要求,节能高效是当今世界的主旋律。从地球上的一个航路点到另外一个航路点,以球心为圆心的两点之间的劣弧距离最短,这种飞行路径计算方式被称为大圆航段算法。因此大圆航段航程被广泛应用于航海和航空,但是由于地球是圆的,采用墨卡托投影投影成为一个平面,直接连线两个航路点作为航线,与实际大圆航段算法航线路径不符,造成偏航距相差过大等问题。本文旨在在墨卡托地图平面上更好地刻画大圆航段航线,在一定程度上减少偏航距误差,从而给驾驶员正确的判断。
1 航程投影计算模型
1.1 墨卡托模型
墨卡托投影又称为“等角正轴圆柱”投影,由荷兰地图学家墨卡托于1569年提出,其基本原理是假设有一个在赤道与地球相切的圆柱体,先把椭球面映射到圆柱体表面,然后展开圆柱面,即实现了球平转换。该投影具有等角特性,在保证对象的形状不会改变的同时,也保证了方向和相互位置的正确性,因此常常应用在航海和航空领域。在墨卡托投影上,恒向线表现为一条直线,大圆航段表现为曲线,但是实际上大圆航段的距离要比恒向线要短。大圆航线是跨洋航行时采用的地理航程最短的航线。墨卡托投影后,经纬度正交,经纬度间相互平行且为直线,纬线间隔以赤道为起点,随纬度的增加向两级逐渐伸长,甚至在极地投影为无穷大,经线为相互平行的直线且间隔相等。下面介绍一下墨卡托投影坐标转换的正反算方法。
如图1,点A(φ,λ)经过墨卡托投影得到新坐标标的点A'(x,y),其中φ0为标准纬度,λ0为标准经度,e 为第一偏心率,e'为第二偏心率,a 为长半轴,b 为短半轴,墨卡托投影正解公式为:

其中

墨卡托的反解算公式可以采用牛顿迭代的方法进行解算,即已知q 求φ,方法如下:

图1:墨卡托投影

其中:

迭代至|φi+1-φi|<10-7为止。
1.2 大圆航段距离计算模型
从地球上的一个航路点到另外一个航路点,以连接两点之间的劣弧距离,即大圆航段算法所飞行路线是最短的。若将地球当做圆球体,地球上两点间的距离,以连接两点的小于180 度的大圆弧长最短,其航程计算公式如下:

由于经、纬度均有名称和符号,在利用上式求取航程时,应遵循以下规律:
(1)起始点纬度φ1一律取正值;到达点纬度φ2,与起始点同名时取正值,异名时取负值。
(2)经差Dλ 一律取正值
(3)若按上述取值解算的cosS 为正值,则航程S 为小于5400n mile(90 度)的值;若为负值,则航程S 为大于5400n mile(90度)的值。
1.3 恒向线航程距离计算模型
恒向线是利用墨卡托投影具有等角及恒向线为直线的特点而得出的计算方法,除了在等纬圈上航行外,其他任何场合都适用,计算公式为:

式中φ 为纬度,Dλ 为经差,MP 为纬度见长率,式中的C 为恒向线航向,DMP 为到达点与起始点之间的纬度渐长率差。北纬取正,南纬取负。东经取正,西经取负。
船舶或者飞机在等纬圈上航行,即航向为90 度或者270 度时的航迹计算,虽然不能使用墨卡托算法,但是相关计算比较简单,公式为:

1.4 大圆航段航程投影方法
本文采用将大圆航段进行多段式映射,将大圆航段航线投影到二维平面地图上,且偏航距与地图航线无明显偏差。首先由导航设备给出从点,到点和当前点经纬度坐标,计算从点与到点之间的大圆航段距离,将距离作为分段标准,如经过30km 则进行一次分段,距离是一个经验值,可根据路程长短,精确度等要求进行缩小或者放大。通过距离将大圆航段分割成多个小段,计算每个小段的经纬度,然后通过墨卡托投影公式计算二维平面X,Y 坐标值,依次将二维平面内所有点进行连接,则得到大圆航段航线投影。图2 为程序流程图,图3 为不同投影航线方法效果对比图。
其中绿色的线,是恒向线航程,也是原先大圆航段投影路线,通过直接将从点和到点连接成线得到,红色曲线则是大圆航段在墨卡托地图上的真正航程路线,而蓝色线则是本文分段投影算法得到的航线,从图上可以看出,直接连接航路点得到的航线投影与大圆航段真实航线投影相差较大,分段投影与大圆航段则重合度较高,但是仍存在部分分离的情况,这取决于分割段数,距离可以很好的衡量分割段数。
2 实验结果
2.1 恒向线与大圆航段实验分析
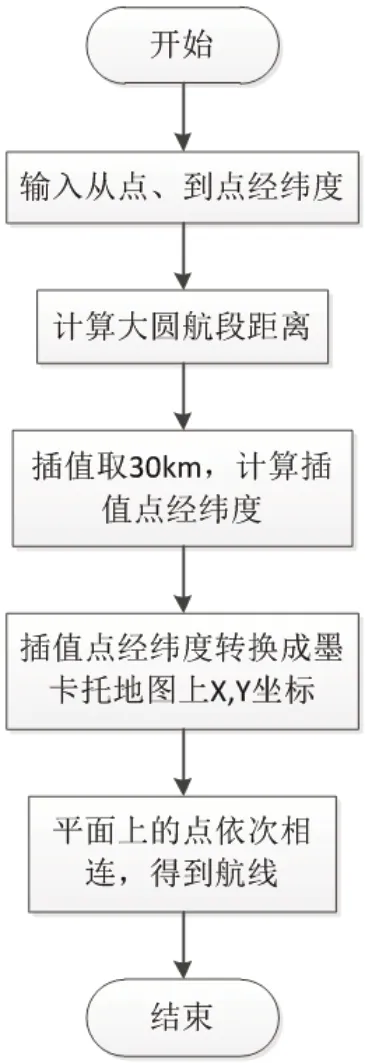
图2:程序流程图

图3:大圆航段、恒向线、分段投影对比图
将恒向线与大圆航段算法距离算法转换为程序语言,并将距离转换为角度进行比较,其中gc 代表大圆航段,rh 代表恒向线。软件的开发环境为macOs,编程语言为matlab 语言。对比实验结果如表1 和表2 所示。
以上表格所有大圆航段航程均小于恒向线航程,在低纬度,南北航向或者短距离航程中,两者差距不大,但仍是大圆航段表现更好,为此,选择大圆航段为现代航程规划的首选。

表1:经度不变纬度小幅度变化大圆和恒向航程比较

表2:经度逐渐增大,纬度范围逐渐增大的大圆和恒向航程比较
2.2 恒向线、大圆航段和分段投影分析
为了能够在墨卡托地图上构建出大圆航段,本文采用计算起始点和终点的距离,用距离进行分割,将大圆航段分割成多个恒向线,进行投影,这样在一定程度上折线接近曲线,从而使实际飞行路线与地图上显示路线接近,为飞行员做出正确判断做了引导。将大圆航段航程投影算法转换为程序语言,嵌入到航电系统中的飞行软件中。软件的开发环境为tornado,编程语言为C 语言,硬件平台为VxWorks 嵌入式系统。实验结果如下:
以(N40,E120)为起始点,(S122,E30)为终点,为了在墨卡托地图上实现大圆航段的映射,我们采用不同段数来分割大圆航段得出表3。
如图4,从以上数据可以看出,随着分割的段数越来越多,分割后的角度越接近大圆航段角度,角度越相近,距离越相近,但经过分割得到的航程距离只会无限趋近大圆航段航程距离,并且不会大于恒向线航程距离。
假设从点(N53.3616666, E114.58002),到点(N52.3616666,E115.58002),当前点为(N53.0016666,E114.9450)
从表4 可以看出,不进行插值计算时,大圆航段算法的偏航距和直接在地图上投影计算的偏航距相差较大,而对大圆航段航线分段进行投影,得到的偏航距与真实偏航距误差较小,验证了算法的可行性,满足了性能要求,同时降低了偏航距误差,模拟出了大圆航段航程真实路径。因插值数值越小,计算机处理的运算量越大,根据不用应用环境,飞行航程距离等因素,选取不同的插值进行投影。
3 结论
本文通过不同的实验案例,分析了大圆航段和恒向线之间的差别与差距,在三维立体中,大圆航段是最短航线,恒向线则是保持等角特性,距离却不是最短,在墨卡托投影平面上,恒向线表现为直线,而大圆航段则表现为曲线。大圆航段始终是优于恒向线的,但是在低纬度和南北航向时,差距较小。本文改进大圆航段投影方法,利用距离将大圆航段分段投影在了墨卡托地图上,分段投影后的偏航距与实际偏航距相差较小,很好的模拟了大圆航段航程的真实飞行路径。本文算法在嵌入式系统中验证其正确性,具有实际工程应用价值。

表3:恒向线、大圆航段、分段投影比较

表4:恒向线、大圆航段、分段投影比较

图4
