基于足底压力感知的身份识别系统
2020-02-02李汉林李洁刘天宇
李汉林 李洁 刘天宇
(滨州学院 航空工程学院 山东省滨州市 256600)
近年来随着计算机处理能力的提高与人工智能的兴起,使步态识别作为一种非侵入识别方式的识别准确性不断提高,其非接触性,不易察觉,也使被测人员很难进行伪装。科学医学研究发现,人的步行姿态包括二十多种特征,且受到多种生理因素影响,如果全面考虑这些因素,每个人的步态都是不同的。通常基于机器视觉的步态识别的输入数据是很多帧步行的图像序列,因为机器视觉所用到的算法模型对算力要求较高,处理困难,且容易受到很多外界因素干扰[1],比如:环境光线,拍摄角度,衣服鞋帽等都会影响人体轮廓。本项目采用的压力感知方式的步态识别实现方法简易,直观,在继承步态识别的优点同时可以有效地的避免上述问题。所有本文设计一种基于步态识别的足底压力感知人员身份识别系统。
1 系统结构与功能
本身份识别系统由压力传感模块,STM32F4 单片机,红外唤醒模块,上位机等器件组成,结构示意图如图1所示。
1.1 采集设备结构
考虑到步态识别方式的特性,充分发挥步态识别的优势,采集装置采用嵌入地面设计,具有隐蔽性,不易察觉,如图2所示。
1.2 压力传感模块
通过柔性薄膜压力传感器横纵分布式交叉排布构建出来的400个采样点,采集行走过程中脚掌的压力变化生物数据,进行数据采集。通过大量程应变式称重传感器测量人体体重信息。如图3所示。
柔性薄膜压力传感器的阻值R 随着受力F 的增大而减小,设计电路通过STM32F4 单片机测量读取薄膜压力传感器的电压值,传感器的电压值因为电阻值的变化而变化。通过单片机收集柔性薄膜压力传感器各个节点数据变化,得到行走过程中脚掌的压力变化,量化压力变化数据。可以测量出足底各个位置的压力值,柔性薄膜压力传感器压力与电阻曲线如图4[3]。
1.3 STM32F407VET6单片机
STM32F407VET6 芯片具有低功耗,高性能的优点,芯片最高运行频率168MHz,12 位数模转换器,符合设计要求,使用STM32F407VET6 进行模拟信号采样,STM32F407 VET6 单片机将采样信号进行预处理,封装通过串口发送给上位机。
1.4 红外唤醒装置
考虑到功耗及元器件寿命等原因,使用红外光电开关对是否有人员出入进行检测。无人员进出时单片机处于休眠状态,当检测到人员进出时唤醒单片机。
1.5 上位机
在上位机搭建软件算法,使用足底压力分布及变化作为步态信息,对识别模型进行训练从而实现对人员的鉴别。

图1:系统结构示意图

图2:采集设备结构图

图3:压力传感器
2 压力数据特征提取
根据H.奈奎斯特提出的采样定理,必须当采样频率大于被测量的模拟信号最大频率两倍以上时,采样数据才能完全显示原信号的特征。相关调查表明人体运动频率一般不高于 30Hz,本系统按照人体活动频率不高于 30Hz,设计对足底压力传感器采样频率为80Hz[2]。通过上位机从单片机获取的数据,拟合出足底压力分布图像,并使用opencv 库对足底压力分布图像进行处理。如图5所示。

图4:压力KG 与电阻KOhm 变化曲线

图5:足底各区域的压力分布图

图6:足底区域划分
2.1 数据处理
为了确保提取到的足底压力图像的完整性,防止因接触传感器位置的边缘导致压力图像的不完整而导致测量结果错误。本设计设定足底长宽比的上限与下限,当压力图像不在此范围时排除该压力图像。
2.2 足底区域划分
根据计算压力图像有参数的行与列,算出足部长和宽的像素点的个数,分别记为r 和c。依照列数r 等分为三等份,记为r1,r2,r3,分别对应各部分的有效行数。如图6所示。

图7:不同人员步态特征变化曲线
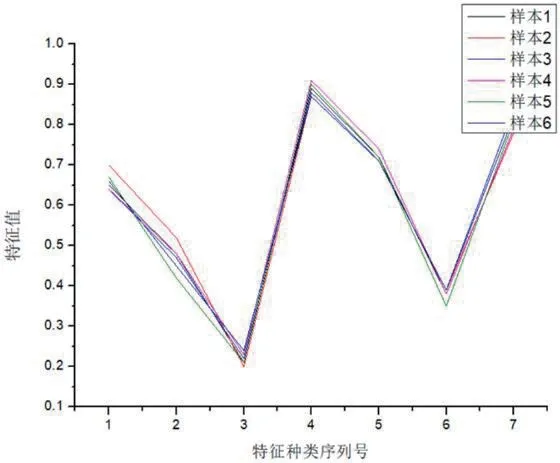
图8:同一人员步态特征变化曲线
2.3 压力分布特征提取
2.3.1 形状特征
根据人脚的生理特点,通常使用脚与地面的接触面积和足底长宽比来反映被测人员足底的形状特征。压力图像的有参数的行与列,计算足部长的行数和宽的列数,足底各区域的长和宽是指足底各区域中有压力参数行数和有压力参数列数。足底的接触面积是指足底中有压力参数的像素点的个数。
2.3.2 最大压力图像
由于人在行走时,足底接触地面的过程为动态过程,因此当不同人员脚从接触地面到离开地面的压力曲线都会不同,从中选取压力最大的图像的最大压力像素点。将整个足底与传感器接触区域受力使人前进的力集中于特定区域,该区域就是足底压力中心点。一般情况下,足底压力中心点位于足底中间部分靠近内侧的位置。由于不同人肌肉力量骨骼长度脚型的不同,足底压力中心点的位置也会有很大的不同[4]。足底压力中心点计算公式(1),(2)。


图9:系统流程图
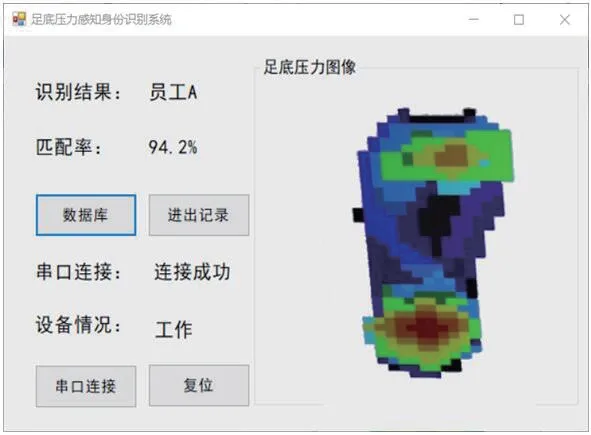
图10:系统软件界面图
Xi和Yi为提取压力图片上的像素点的行数与列数,Pi为提取压力图片上当前读取像素点的压力值,n 为该压力图像中矩阵像素个数,Xc和Yc分别为足底压力中心点的行数和列数[3]。
2.3.3 时空参数
设定从一只脚接触传感器瞬间到另一只脚接触传感器瞬间所用时间为行走周期,支撑时间为在一个行走周期内一只脚与传感器接触的时长,因为个人的生理差异都会有所不同[5]。
3 识别算法设计
目前步态识别的方法大多是基于模式识别的判断方法。随着人工智能算法的发展,基于模式识别的判断方法准确性越来越高,但现在模式识别常用算法无一不需要大量的测试样本对分类器进行训练,获得较好的识别效果[6]。由于本系统的实际应用场景问题,无法获得被测试人员的大量样本。所以我们尝试设计出具有普适性的步态识别算法。来实现对于测试人员录入的单一样本也能获得较好的识别准确率。对不同人员的样本进行特征提取,将提取的所有足底压力特征进行归一化处理,得出实验数据如图7,8 所示。
特征值序号:1 接触面积,2 足底长宽比,3 最大足底压力像素点,4 足底压力中心点,5 行走周期,6 支撑时间,7 体重。
实验发现不同人员的足底压力中心点,支撑时间,足底接触面积三个足底压力特征在数值上有较大波动,赋予较高的识别优先级,根据各个特征数据波动幅度的大小,依次进行优先级排序,再根据优先级对识别算法各特征的权重进行调整。达到当测试人员只录入一次本人足底压力样本,之后对未知样本进行判断的要求。
4 系统总体设计
系统总体流程图如图9所示。
当有人员通过时,系统被红外唤醒装置唤醒,检测人员足底压力信息,与数据库已有模型进行匹配,进行人员身份识别。系统软件如图10。
5 结语
本项目设计一种基于物联网研发的一套足底压力感知身份识别系统,通过薄膜压力传感器,采集行走过程中脚掌的压力变化生物数据,通过大量程应变式称重传感器测量人体体重信息。将信号传输给STM32F4 单片机,然后STM32F4 单片机将数据封装发送给上位机,上位机搭建软件算法,使用足底压力分布及变化作为步态信息,设计识别算法,采集出入人员的脚掌压力分布及变化趋势,从而实现对人员身份进行鉴别,同时通过其出入时的体重及步态的微小变化,分析人员是否携带异常物品。本系统基于步态识别的足底压力感知人员身份识别系统,步态平均识别率达到89.2%,可以在20 个样本存量中实现准确识别。本项目采用的压力感知方式的步态识别实现方法简易,直观,在继承步态识别的优点同时有效地的避免了步态识别对算力要求较高,环境对识别结果影响较大的问题。在步态识别领域具有一定的实用性和研究价值。
