ADS-B被动监视防撞告警系统设计
2020-01-18李洪伟章学锋杨希鹏
李洪伟,章学锋,易 东,杨希鹏
(四川九洲空管科技有限责任公司空管研究所,四川绵阳621000)
空中交通告警与防撞系统(TCAS,traffic alert and collision avoidance system)是一种不依赖地面的空中交通管制系统机载设备,用于保证空中飞行间隔,是空中交通管制系统的备份系统[1]。TCAS 基于二次监视雷达原理,其典型配置包括:TCAS 主机、S 模式应答机、显示单元、控制单元和定向/全向天线[1]。由于其系统交联复杂、体积功耗较大、成本高,主要用于军民用运输机和大中型轰炸机等,难以在小型飞机上推广应用。
随着通用航空和无人机的快速发展,通用飞机、军民用无人机等小型飞机的数量越来越多,其飞行冲突风险越来越大,飞行防撞问题越来越突出。广播式自动相关监视(ADS-B, automatic dependent surveillance-broadcast)是美国联邦航空管理局(FAA)用于高精度监视空中目标飞机和实现空中交通管制的技术手段之一[2]。FAA 希望通过使用ADS-B 设备实现在空域飞机密度不断提高的情况下,减少飞机间隔、降低碰撞危险和节约油耗成本,并且提高商用运输飞机和小型飞机的空域态势感知能力。目前国内在研究利用ADS-B 进行防撞方面,文献[3-6]提出利用ADS-B 实时监视数据来计算飞机是否进入冲突保护区的方法,保护区是基于间隔标准、飞行规则或定位精度设置,且大小固定,但其存在以下问题:①保护区大小与相对运动状态无关,因而在不同碰撞场景下(相对运行状态不同),其预警时间的长短不确定,飞行员在识别与避撞操作上严重不适应;②基于间隔标准的防冲突可理解为间隔保持,其预警提前量很大,一般由地面空中交通管制(ATC)负责。文献[7-10]提出利用ADSB 监视信息,借鉴TCAS 原理或直接将ADS-B 数据发送给TCAS 来进行防撞,前者直接将ADS-B 数据作为TCAS 数据源,但考虑TCAS 原理难以避免目前已发现的多种TCAS 虚警现象,后者仅将ADS-B 数据作为监视数据源之一,用于融合监视。国外对无人机平台开展了多源传感器的融合监视和防撞技术飞行验证。2014年11月,通用原子能公司与美国国家航空航天局(NASA)联手,对装在MQ-9 Reaper 无人机的空中防撞系统(感知与规避系统)技术方案进行了飞行验证,其自动防撞系统包括:ADS-B、TCAS 和小型探测雷达,其中ADS-B 主要用于融合监视。
结合以上研究,提出基于ADS-B 的机载防撞告警系统,利用ADS-B 监视数据得到飞行态势,建立依据两机会合速率的动态保护区,检测本机是否进入目标机保护区来判断飞行冲突,给出连续实时更新的告警指示。该系统能在不同冲突场景下给出一致的预警时间,预警结果更精确合理,更符合飞行员操作需要。
1 总体架构设计
基于ADS-B 实现交通态势感知,需要2 个全向天线、1 个ADS-B 接收机和1 个处理模块。前者通过全向上下天线接收空域其它飞机的ADS-B 广播报文,后者对其进行译码处理后形成航迹,并通过威胁探测和告警处理算法形成告警,通过图形和语音方式提醒飞行员存在碰撞冲突危险。系统组成框图如图1所示。
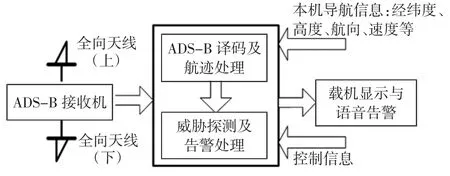
图1 系统组成框图Fig.1 System composition block diagram
系统工作流程如下:
1)ADS-B 接收机通过上/下全向天线接收空域中的ADS-B 广播报文;
2)译码及航迹处理模块对广播报文进行译码并形成目标的点迹,然后进行航迹处理,形成目标航迹;
3)威胁探测及告警处理模块对目标飞机与本机的经纬度、高度、速度、航向信息进行关联处理、航迹预测,并判断本机与每1 架目标飞机是否会碰撞交汇,如果存在则通过图形和语音方式输出告警提示。
2 冲突探测原理
首先建立飞机的保护区模型(保护区大小根据预测的会合速率而改变),然后预测本机与空域中所有相关目标飞机的会合轨迹和会合速率,当本机沿着预测轨迹对目标机保护空域出现入侵时,则产生告警。算法包含3 个主要模块:建立保护空域、轨迹预测及告警决策逻辑。
对每架运动的目标飞机,以该飞机为中心,建立2 个同心圆柱状的保护空间。外部保护空间的大小根据本机与目标机的会合速率动态调整,称为保护区(PAZ,protected airspace zone);内部保护空间大小固定,称为碰撞区(CAZ,collision airspace zone)。设水平最小保护距离为500 ft(1 ft=0.304 8 m),垂直最小保护距离为200 ft,保护区域示意图如图2 所示。
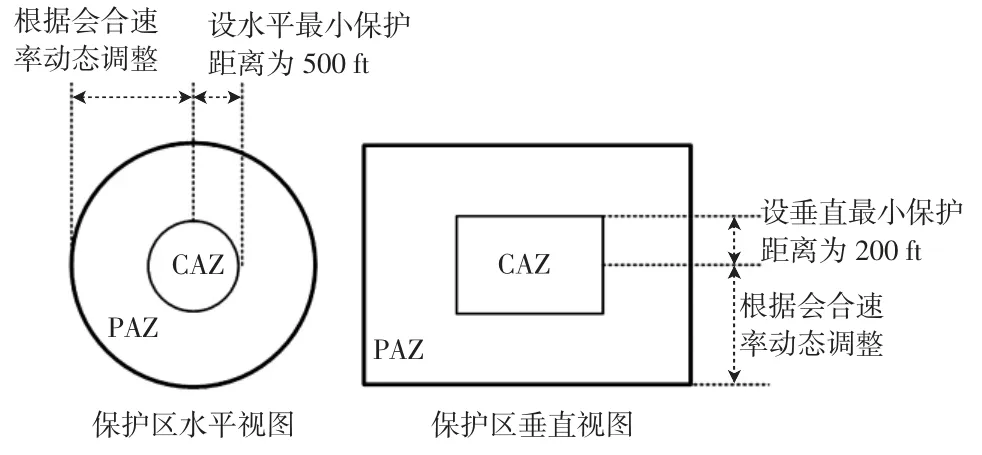
图2 目标机保护区域示意图Fig.2 Protected area diagram of target aircraft
目标机和本机的轨迹按1 次/s 的周期进行预测。根据常数转弯率,即目标机和本机以固定的机动进行连续稳定的转弯,预测二者的持续运动状态以及将要到达的位置,目标机和本机固定转弯率轨迹预测如图3 所示。
在固定转弯率下,目标机和本机的相对几何会合形状是动态变化的,因而会合速率会变化,动态保护区随会合速率的减小而缩小。依据目标机沿轨迹的空中缓冲区域面积及其预测位置,本机告警逻辑确定是否为给定目标报警。如果本机被预测侵入目标飞机PAZ区域,则发出初始告警信息并传给飞行员,报告目标位置并继续观察目标的行动。标准告警格式示包含了目标机的状态和运动参数,如:“交通、交通,10 点钟方向,高度3 000 ft,3 n mile(1 n mile = 1.852 km),下降”。图3 中,PAZ 区域沿着预测轨迹逐渐缩小,预测到本机将在未来30 s 内进入目标机的PAZ 区域,导致向飞行员发出初始告警。如果状况一直未改变或更加恶化并且预测将有CAZ 入侵发生,告警系统将会报告给飞行员更新的告警信息,该信息格式不变但是更新了目标机位置和行为信息。当直接检测到本机侵入目标机保护区或碰撞区,则发布告警中包含声光警示。
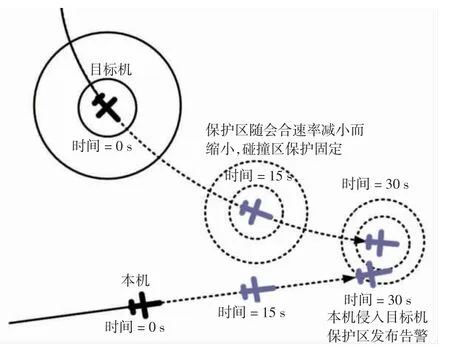
图3 固定转弯率轨迹预测Fig.3 Trajectory prediction of fixed turning rate
3 算法设计及实现
3.1 概述
算法包括:目标机威胁数据库和冲突检测器两个部分,两者分别对应算法运行的更新模式和探测模式,顺序执行。当存在新的目标信息时,首先更新目标机威胁数据库(最低更新率为1 Hz),然后利用冲突探测器对威胁数据库中的目标进行威胁评估。冲突探测器始终使用威胁数据库中最新时刻的可用数据。
3.2 更新模式
在更新模式下,算法利用接收到的实时状态信息更新威胁数据库。其中的数据变量如表1 所示。
3.3 探测模式
探测模式是算法的核心,对威胁数据库中的每个目标进行估计,确定其是否对本机产生威胁,包括:轨迹预测、冲突搜索和冲突确认3 个模块。冲突算法框架如图4 所示。
3.3.1 轨迹预测
轨迹生成器产生本机和目标机轨迹,该轨迹定义了本机和目标机将要遵循的运动路线。假设本机和目标机保持当前的转弯率、水平速度和垂直速度[11],设轨迹预测产生空间离散点的间隔时间为t,前向预估时间为tlook,则轨迹预测点数量n 取决于tlook和t,其计算公式为:tlook/t。每条预测轨迹的第1 个点是告警系统最后接收信息的点,其坐标为(x0,y0,z0)。轨迹生成器对本机和每架目标机分别进行轨迹预测,则在预测时刻k下的跟踪角度和目标机轨迹的坐标位置可表示为

表1 威胁数据库中的数据变量Tab.1 Data variables in threat database

图4 冲突探测算法框架图Fig.4 Frame diagram of collision detection algorithm
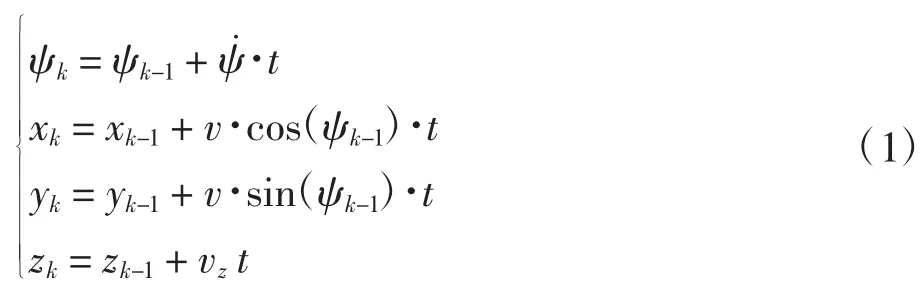
其中:v 为本机和目标机的相对水平速度;vz为本机与目标机的相对垂直速度;k=1,2,…,n。
3.3.2 冲突搜索
在本机轨迹和每个目标机轨迹之间依次进行比较,确定是否存在对本机构成碰撞威胁的目标机,过程包括:①计算PAZ 大小和物理间隔;②对CAZ 和PAZ 预计间隔进行评估;③确定告警状态。
1)计算PAZ 大小和物理间隔
针对已生成的目标机和本机预测轨迹,预测时刻k 下目标机PAZ 的大小会随着其与本机会合速率的变化而变化,需首先求出预测时刻k 下二者在水平和垂直方向的会合速率,即

其中:dx,k和dy,k分别为预测时刻k 下目标机与本机在东西和南北方向的相对距离;vrel,x,k和vrel,y,k分别为预测时刻k 下目标机与本机在东西和南北方向的相对速度;vz,tar,k和vz,sam,k分别为预测时刻k 下目标机与本机在垂直方向的速度。预测时刻k 下水平和垂直方向上PAZ 区域大小可表示为

其中:τ 为碰撞预警时间,取值范围为15~35 s.
预测时刻k 下沿着预测轨迹的目标机与本机的水平和垂直间隔计算公式如下

其中:dv,k为预测时刻k 下目标机与本机在垂直方向的相对距离。
2)对CAZ 和PAZ 预计间隔的评估
该流程沿着预测时刻k 预计间隔距离(Seph,k和Sepv,k)以确定本机是否位于目标机的PAZ 或者CAZ的边界之内。如 果Seph,k和Sepv,k均小于PAZh,k和PAZv,k(例如,有PAZ 入侵),则沿着轨迹最早产生入侵点的时间被记录为tPAZ。同理,如果预计产生CAZ 入侵,沿着轨迹最早产生入侵点的时间被记录为tCAZ。
3)目标告警状态的确定
采用告警双触发及告警抑制检测方法来确定目标是否进入告警状态。主要处理机制如下:①确定是否为两个连续PAZ 或CAZ 侵入,然后立即产生PAZ或CAZ 告警或再次检测一个周期,当达到双触发门限后才进行告警;②确定告警是否发生在告警滞后范围内,如果是则应被抑制。一旦产生告警,则通过视频和语音的方式给出告警提示,设置滞后功能,一旦目标进入告警状态,则将在视频和语音信息最长可能保持时间段内保持告警状态,该时间段定义为滞后时间。
3.3.3 冲突确认
转弯率估计的噪声对于轨迹预测有明显影响,可能导致轨迹的“摆动”,从而产生不必要的告警,还可能导致2 架飞机在动态演变过程中有效告警结束,对相同目标重复告警。使用常数转弯率轨迹预测的另一个影响是急转弯时预计轨迹可能弯曲甚至产生360°翻转。例如机场环境中,原本持续的操作不会导致不安全的环境,但该预测算法则可能产生虚假的威胁。
预防转弯和摇摆请求告警的方法为:除非本机已经在PAZ 区域内,如果当前观察到的状态预测时间范围内没有指明最接近点将会到达,则不进行告警。
预防重发告警方法为:保持告警状态,直至目标机在垂直方向或者水平方向不再靠近本机。
4 仿真及分析
4.1 仿真场景描述
仿真场景分为告警和不告警两种情况。数据来源于经过筛选的ADS-B 真实飞行轨迹,经过时间和空间的归一化处理后使飞行航迹产生需要的碰撞场景,并经过加噪声处理。数据源的信息主要包括:时间戳、地址码、经度、纬度、东西向速度、南北向速度等。
机型包括固定翼飞机和旋翼飞机,典型的应用场景包括:迎头碰撞、追尾碰撞、机动碰撞、交叉碰撞、迎头不碰撞、追尾不碰撞、机动不碰撞、交叉不碰撞等。具体选用的仿真场景见运行结果分析。
4.2 仿真程序平台及程序原理
所有仿真程序和实验均运行于Matlab7.3.0。首先,对输入的数据文件分别按本机和目标机进行时间序列重排。本机不作航迹预测处理而是直接更新,目标机则按照前向35 s(以1 s 为单位,共35 个步进)计算其PAZ 和CAZ 范围。经过冲突确认后发出告警或取消告警。程序中建立了1 个抽象航迹类的航迹池,其抽象属性至少包含如下元素:航班号(可以是内部虚拟ID),时间戳,x 轴坐标(东西向位置),y 轴坐标(南北向位置),z 轴坐标(高度),x 轴速度,y 轴速度,z轴速度,航向,转弯速率,航迹延展(航迹预测)。
4.3 运行结果分析
仿真实验共测试了777 个用例,从测试结果看,发出告警和取消告警的时间均符合规则,能够有效感知本机周边交通情况,帮助飞行员规避潜在威胁。以3个典型场景用例进行分析,仿真结果如图5~图7 所示。其中:目标机与本机轨迹上箭头方向为飞机运动方向;围绕在目标机外的浅色圆环为水平保护区;目标机上下的浅色包络为垂直保护区。
1)追尾不碰撞场景
仿真结果如图5 所示。该用例是飞行中最常见的一种情况,双机在同一航线上追尾飞行,地面观察站很容易给出碰撞预判,但其实由于双机的速度差异和切入角很小,实际飞行中并不会产生碰撞事件,图5(c)和图5(d)分别显示没有发生告警。
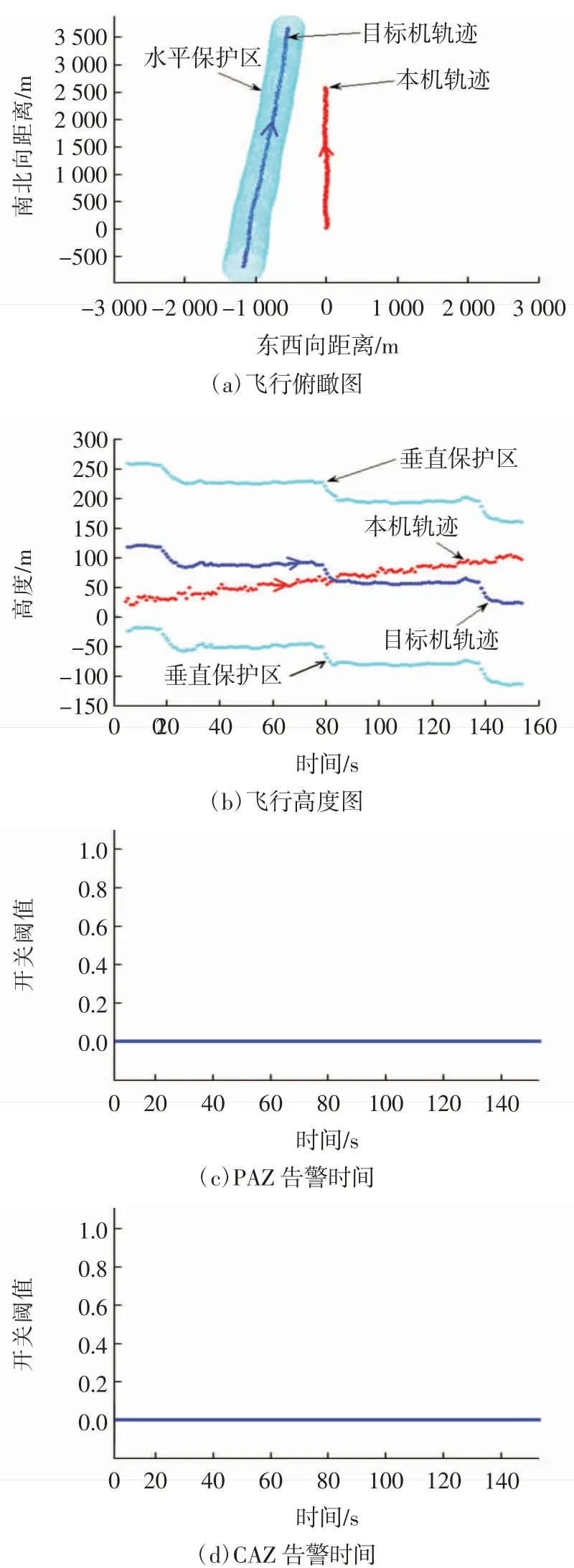
图5 用例1 的仿真结果Fig.5 Simulation result of Case One
2)交叉碰撞场景
仿真结果如图6 所示。该用例是一种典型的碰撞事件。水平方向上有较大的切入角且速度差异不大,垂直方向上本机快速爬升,目标机快速下降。由图6(c)和图6(d)可以看到保护告警立即开启,紧接着碰撞告警也一并开启。其中,图6(c)和图6(d)分别显示了PAZ 告警和CAZ 告警的发布和保持时间。
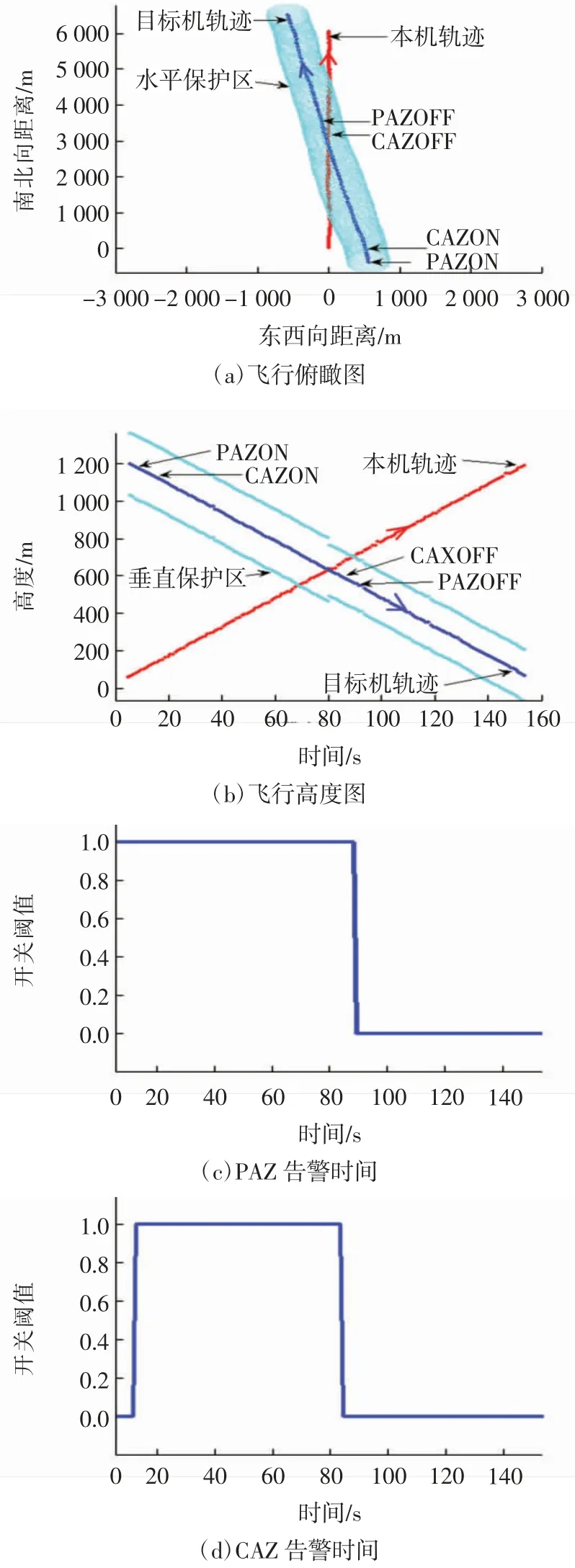
图6 用例2 的仿真结果Fig.6 Simulation result of Case Two
3)双机机动碰撞场景
仿真结果如图7 所示。该用例是双机大机动情况下的碰撞场景。图7(a)显示目标机在机动中,随着碰撞的可能性增加,保护区的范围扩大(在碰撞区外);随着双机逐渐接近,保护区则根据会合速率逐渐减小,直到发生碰撞恢复至默认最小值。CAZ 告警在碰撞发生后立即关断,而PAZ 告警在碰撞威胁完全消除后关断。图7(c)和图7(d)分别显示了PAZ 告警和CAZ 告警的发布和保持时间。
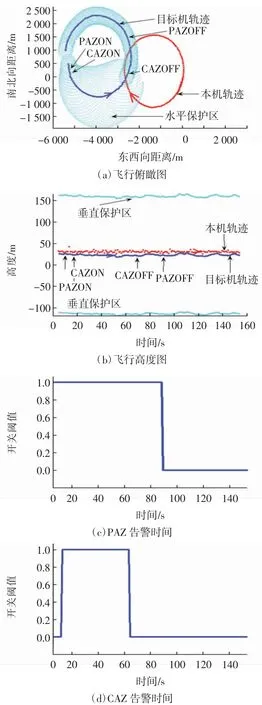
图7 用例3 的仿真结果Fig.7 Simulation result of Case Three
5 结语
针对小型飞机的防撞需求,利用ADS-B 报文位置信息实现飞机空空监视,在此基础上设计了基于ADS-B 的防撞系统总体架构,提出依据两机会合速率来建立动态保护区的方法,给出冲突检测告警算法,并利用真实飞行数据进行仿真分析。该方法建立的保护区与两机相对飞行状态相关,对不同飞行场景能给出一致的预警时间,预警更精确更合理。该系统具有更低的成本、重量和功耗。在工程应用中要注意对算法的鲁棒性、安全性进行提升,同时考虑测试需要,在系统出现故障时能够检测到故障,并进入降级模式,防止在系统数据或外部数据异常时给出不当告警。
