一种极区统一坐标系及其导航参数转换方法*
2020-01-08林秀秀卞鸿巍王荣颖
林秀秀,卞鸿巍,王荣颖,马 恒
(海军工程大学电气工程学院,武汉 430033)
0 引言
极区导航技术是对极区研究开发的重要基础,是近年来国内研究的热点。而极区坐标系是极区导航的基础性问题,影响极区时空基准的确立,所以对极区坐标系的研究具有重要的意义。传统导航方法应用于极区时,存在真航向、大地坐标系极点经度收敛、导航参数定义不再适用、传统地理坐标系不再适用等问题[1]。因此,极区导航必须采用新的极区坐标系和新的导航参数定义。
目前为止,我国学者对极区导航的研究采用的极区坐标系众多,主要分为格网坐标系和横向坐标系两大体系。其中,格网坐标系在极球面投影海图中采用不同的航向参考基准,形成了格林尼治格网坐标系、图幅中央经线格网坐标系、沿大圆航线格网坐标系等不同格网坐标系的定义,投影方式不同也会对应不同格网坐标系定义。横向坐标系则主要依据Donald R Watlan[2]等人提出的适用于极区导航的横向极区坐标系定义。此外,国内学者还给出了逆坐标系[3]、伪地球坐标系[4]、横向地球坐标系[5]等多种定义方法,这些定义方法基本沿用Donald R Watlan 提出的极区坐标系,用以解决极区导航问题。在本文中为了加以区分,将上述基本沿用Donald R Watlan 提出的极区坐标系的坐标系统称为Donald 极区坐标系。横向坐标系的旋转定义方式也有多种多样,针对不同的应用背景,很多学者对各种横向坐标系的旋转方式也都有一定的研究,如刘猛[6]、张福斌[7]等人为了解决极区对准以及极区组合导航的问题都有定义新的坐标系。针对上述现象提出以下主要问题:1)格网坐标系体系中的定义和概念多样,格网坐标系的确定构建依赖极区海图,而极区海图种类多样,造成学者对其定义方式多种多样;2)横向坐标系体系中的定义和概念多样,没有明确建立起横向坐标系与格网坐标系之间的联系;3)称谓不统一。格网坐标系,也称为栅格坐标系、网格坐标系等,横向坐标系也称为逆坐标系、伪坐标、横向地球坐标系等,专业术语混乱;4)基于格网坐标系的指向类导航系统和基于横向坐标系的定位类导航系统不能统一,造成不同导航系统间信息交联困难,缺乏统一的极区坐标系定义,给国内极区导航的研究和应用造成了混乱。
针对以上问题,本文提出一种极区横向坐标系,该坐标系实现了基于格网坐标系的指向型导航系统和基于横向坐标系定位类导航系统的统一,并给出不同坐标系间转换关系及导航参数的转换关系,最后通过惯导编排仿真证明该坐标系在极区导航中的可行性。
1 坐标系定义
1.1 统一横向坐标系定义
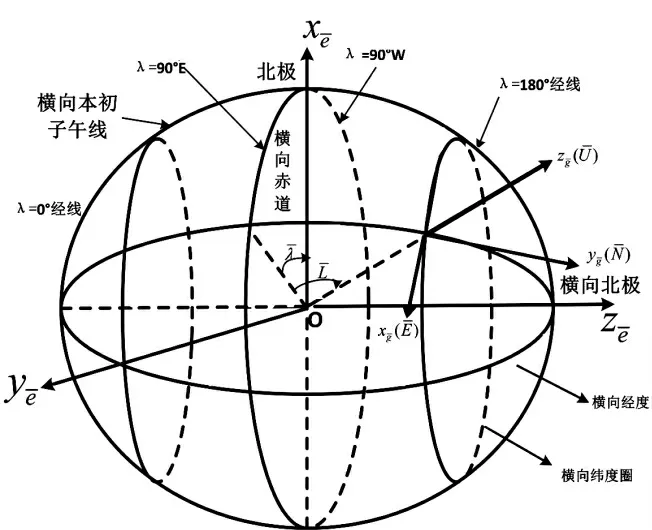
图1 横向地球坐标系和横向地理坐标系
1.2 横向地理坐标系和格网坐标系统一性分析
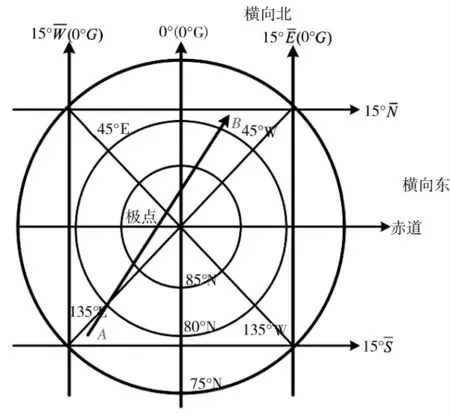
图2 北极区域横向坐标系俯视图
与本文统一的格网坐标系为格林尼治格网坐标系[8-9],格网坐标系本质上是一种地理坐标系,其北向定义为平行于格林尼治子午面的格网平面与当地水平面的交线。由横向坐标系定义可知,横向北相切于横向经度圈,且北极地区位于横向赤道与横向本初子午线相交的区域。在极区范围内,横向经度圈的切线近似平行,由此格网北与横向北本质上是统一的,两个坐标系天向一致,故在极区横向地理坐标系与格林尼治格网坐标系近似统一。
从图1 中仅观察北极区域的横向地理坐标系,可作出图2 所示的北极区域横向坐标系俯视图,发现横向地理坐标系正好是一个格网坐标系,此时横向经纬线近似构成格林尼治导航格网。由此结论再结合横向坐标系的惯导编排就可以为解决北极地区定位和定向上的问题提供理论依据。
2 坐标系转换
2.1 地球坐标系、地理坐标系与横向坐标系之间转换关系
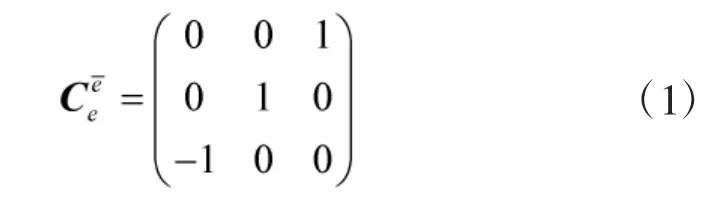
根据以上定义过程,可以写出从地球坐标系到横向地球坐标系间的变换矩阵为
横向地理坐标系可由地理坐标系绕Ozg轴旋转一个σ 角度得到。可以写出地理坐标系到横向地理坐标系的变换矩阵

从地球坐标系到横向地理坐标系的变换可以先从地球坐标系变换到横向地球坐标系再变换到横向地理坐标系,其转换过程由式(3)表示。

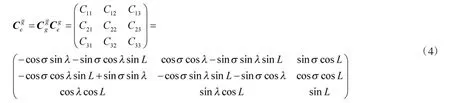
同理该变换也可从地球坐标系变换到地理坐标系,然后再变换到横向地理坐标系而得,其转换过程由式(4)表示。
2.2 Donald 极区坐标系与横向坐标系间的转换
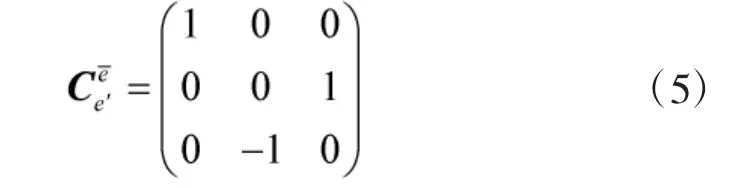
本文提出的Donald 坐标系为Donald R Watlan提出的极区坐标系[2,10],横向地球坐标系绕负轴旋转90°可以转换为Donald 极区地球坐标系。
Donald 极区坐标系到横向地球坐标系的变换过程可以写出从地球坐标系到横地球坐标系间的变换矩阵为
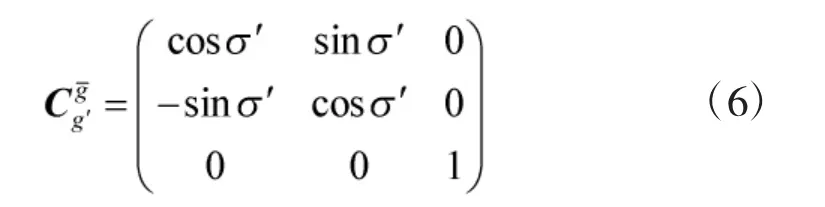
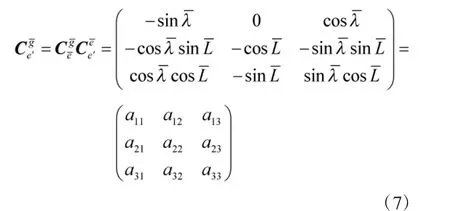
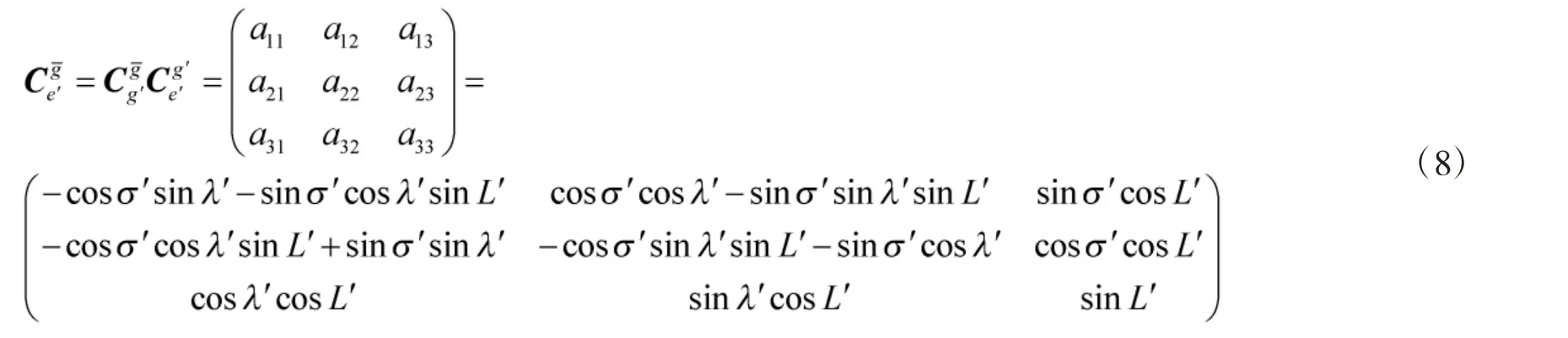
对比Donald 极区地理坐标系和横向地理坐标系,发现横向地理坐标系可由Donald 极区地理坐标系绕Ozg'轴旋转一个σ'角度得到。可以写出地理坐标系到横向地理坐标系的变换矩阵
使用两种变换关系可得式(7)和式(8)。
3 导航参数转换
3.1 地球坐标系和横向坐标系的导航参数转换
结合式(3)和式(4)可得传统坐标系和横向坐标系的导航参数转换关系。
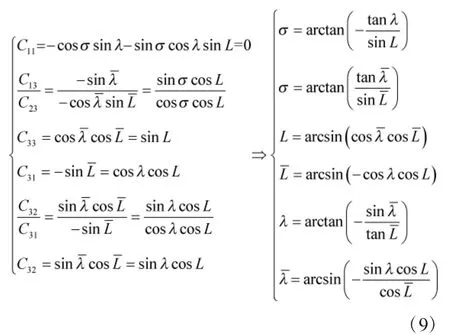
3.2 Donald 极区坐标系和横坐标系的导航参数转换
结合式(7)和式(8)得Donald 极区坐标系和横向坐标系的导航参数转换关系。
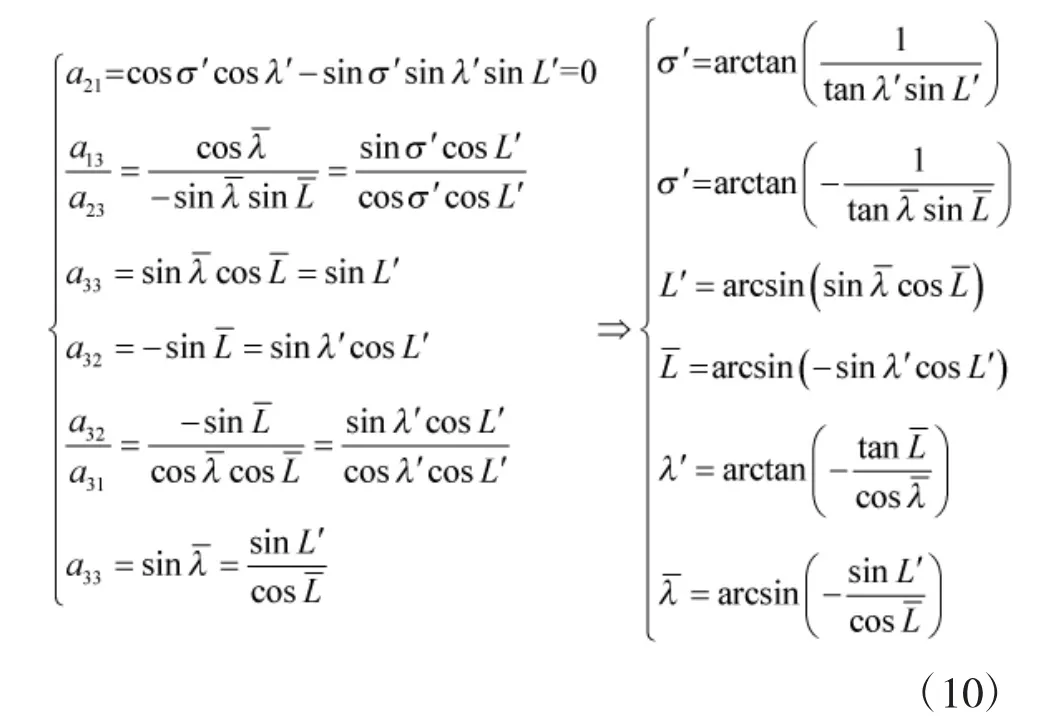
根据上面给出的转换关系,可以将其他的极区横向坐标系的定义方式转换到本文所提出的坐标系中,使得坐标系有更广泛的应用和较强的适用性。
3.3 航向转换关系

根据航向的转换关系和航向与东向速度和北向速度的关系,可以进一步推导出东向速度VE与横东向速度、北向速度VN与横北向速度的转换关系
极区导航系统中常用的海图投影方式有极球面投影和横向墨卡托投影,根据不同的投影方式可以定义不同格网坐标系,分别为基于极球面投影的椭球面格网坐标系和基于横向墨卡托投影的椭球面格网坐标系。下面将对本文坐标系确定的横航向与基于极球面投影的椭球面格网航向、基于横向墨卡托投影的椭球面格网航向之间的转换关系进行讨论。
1)横航向与基于极球面投影的椭球面格网航向的转换关系

其中,l 表示投影图上的经度,sign(·)为符号函数。
2)横航向与基于横向墨卡托投影的球面格网航向的转换关系
4 基于横向坐标系的惯导编排
4.1 姿态微分方程
姿态微分方程由式(15)确定


4.2 速度微分方程
速度微分方程由式(16)确定
4.3 位置微分方程
位置微分方程可由式(17)确定

在姿态、速度和位置的微分方程中,当采用传统地理坐标系时,极区地理纬度L 趋于90°时,计算三角函数会出现计算溢出现象,当采用新定义的横向坐标系时,极区区域横向地理纬度在0°~15°,在惯导编排中,不存在三角函数溢出的问题,即新的横向坐标系可以解决在北极区域出现奇异点的问题,新的横向坐标系在极区适用。
5 仿真分析
为了验证本文所定义坐标系在极区导航中的可行性,本文基于横向坐标系的惯导编排进行仿真试验,在中低纬度横向坐标系与传统地理坐标系均适用的区域进行仿真,对比横向坐标系与传统地理坐标系的仿真误差,验证低纬度横向坐标系的正确性。另外,在极区区域分别对横向坐标系和传统地理坐标系进行仿真试验,验证并说明横向坐标系在极区的适用性。
5.1 中低纬度横向坐标系与传统地理坐标系编排对比仿真结果
假设载体初始地理位置为(60°N,125°E),地理速度为15 m/s,地理航向角为0°,横摇角设置为0.3°sin(πt/4)rad,纵摇角设置为0.3°sin(πt/4)rad,仿真周期为48 h。在轨迹发生器中将3 个陀螺的常值漂移0.01 °/h,随机漂移为0.01 °/h,3 个加速度计零偏为10-4g,随机强度误差为10-4g。仿真结果如图3 所示。
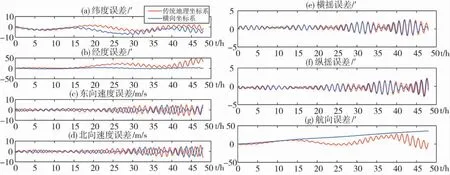
图3 中低纬度横向坐标系编排与传统地理坐标系编排对比仿真结果
分析图3 结果可知:经纬度误差均在8′以内,东向速度、北向速度误差不超过8 m/s;横、纵摇误差不超过3′,航向误差不超过40′;横向坐标系和传统坐标系在中低纬度可以满足一般导航精度要求。可以说明横向坐标系在中低纬度性能与传统地理坐标系差异不大,从而验证横向坐标系的导航编排正确性。
5.2 极区区域横向坐标系与传统地理坐标系编排对比仿真结果
将载体初始地理位置改为(80°N,125°E),其余仿真条件不变。仿真结果如图4 所示。
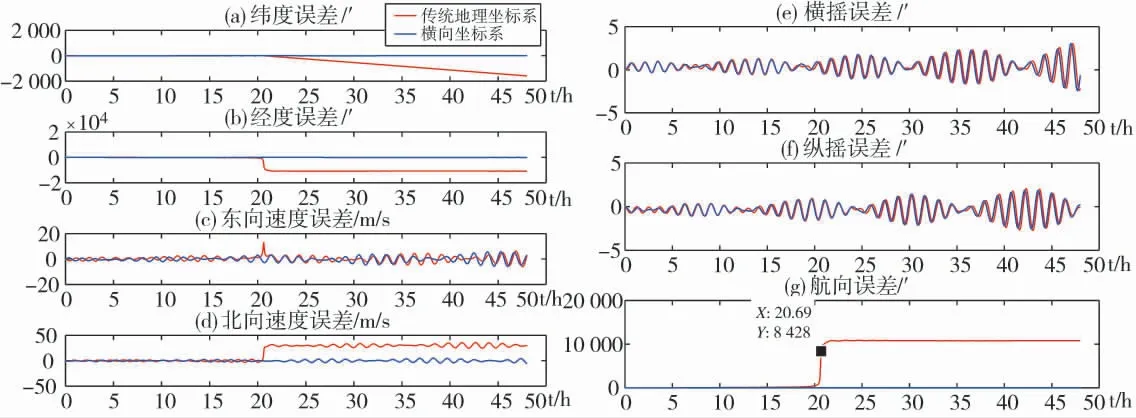
图4 极区横向坐标系编排与传统地理坐标系编排对比仿真结果
分析图4 极区横向坐标系编排与传统地理坐标系编排对比结果表明:1)在轨迹的设定中载体在20.69 h 后到达理想轨迹北极点;2)传统地理坐标系在极点处已经不适用于极区导航,而横向坐标系编排基本不受极点影响,可应用于极区导航。
6 结论
本文针对当前极区导航坐标系存在的问题,提出一种与格林尼治格网坐标系相统一的横向坐标系定义方式,并给出其导航参数的准确定义及与其他坐标系系统的转换关系,使得本文提出的坐标系有更广泛的应用和较强的适用性,同时,通过基于横向坐标系惯导编排的推导进行仿真实验,证明该坐标系在极区的适用性。