基于视频识别技术的船舶视觉盲区增强方法研究
2020-01-03谭志荣陈维王辉李辉
谭志荣 陈维 王辉 李辉


摘 要:船舶自身的装卸设备会对驾驶台的瞭望视野产生阻挡,从而引发了瞭望不全,导致驾引人员对周围通航环境不能及时全面掌握常引起判断错误和疏忽,进而引发事故。针对这一问题提出一种面向盲区的船舶视觉辅助瞭望方法,并设计了辅助驾驶信息可视化系统的总体框架。首先重复采集图像信息,直到搜索到正焦状态的位置,并利用视频识别技术进行识别;最后通过单目测距算法,测量出与目标船舶的距离以把握周围船舶动态。随后通过实验进行测试,结果验证了本系统能有效消除视野盲区、具有较强的适用性。
关键词:瞭望盲区;船舶碰撞;船距测量;视觉跟踪
1引言
船舶自身的货物及装卸设备会对驾驶台的瞭望视野产生阻挡,产生视觉盲区。2018年至2019年期间,长江江苏段发生了多起因视野受限而发生的典型追尾事故。王世彤[1]通过5G将视频信号传递到汽车驾驶室内来辅助驾驶员做出判断;彭同兴[2]设计了基于Arduino和GSM的弯道盲区可视化安全行车装置;刘武艺[3]建立增强现实辅助瞭望模型,并借助AR智能眼镜进行验证;潘亚彬[4]通过三角原理计算出船舶航行时的视野盲区。
2基于视频识别技术的辅助瞭望系统设计及分析
基于视频识别技术辅助瞭望系统设计流程图如图1所示。
船舶辅助瞭望的实现步骤为图像信息的采集、数据传输、图像数据提取和反馈。
3基于视频识别技术的单目测距
3.1单目原理
测距系统是根据光学成像系统在清晰成像时由高斯公式得到物体的距离,以点目标成像为例,基本的成像原理,如图2所示。
3.2基于图像处理的自动调焦过程
3.2.1测距系统基本原理
调焦系统的基本原理,如图3所示。
整个调焦过程仅有一种输入量:目标图像序列,图像处理单元担负核心功能。
3.2.2 聚焦深度法
聚焦深度法主要由图像预处理、构建调焦窗口、图像质量评价和搜索策略制定构成。工作流程是首先采集一帧图像,同时记录图像的位置信息和评价结果;然后改变镜头的位置,再次采集图像,进行图片清晰度的比对,重复进行,直到正焦。
4船舶瞭望盲区分析
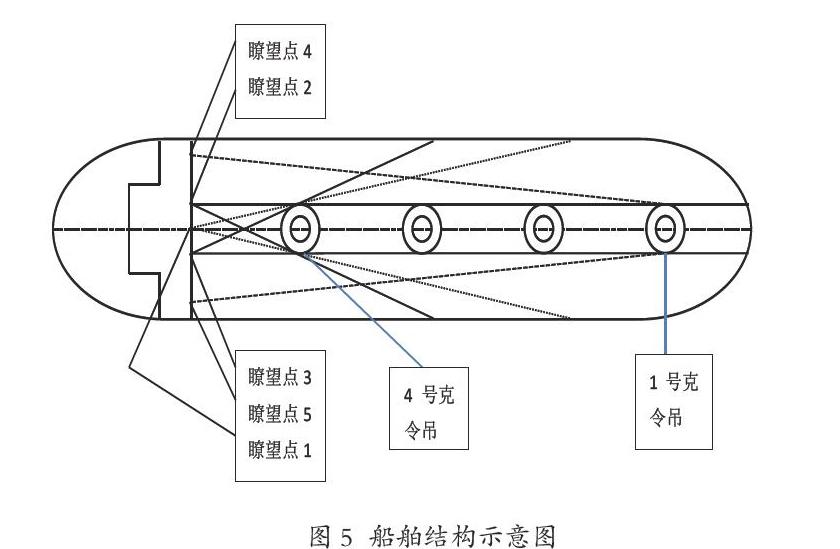
以一艘27000吨的灵便型海船为例,该轮全长157米,宽24米,驾驶台尾布局,沿船中线布局克令吊4座,如图5所示。
其中1号克令吊距离驾驶台110米,4号克令吊距离驾驶台25米,吊柱直径4米,在驾驶台布置5个瞭望点,瞭望点1居中,2、3号瞭望点取四座克令吊边线延长线,4、5号瞭望点取驾驶室两侧距离中线6米处。假设吊臂及支座沿船中安置,只考虑吊柱体对瞭望的影响,则粗略计算出各瞭望点被挡视角:
不考虑船舶平视盲区,仅考虑克令吊对船舶盲区的影响,则自该船驾驶台不同瞭望点的视野盲区如下图6:
在不同距离内,距各瞭望点的被阻挡盲区宽度如下表1:
5仿真算例
5.1图像测距
视频摄像机通过捕捉船舶,并获得相应的基础信息,传输到计算机,随后通过计算内置的测距,计算出目标船舶的距离。随后通过船载雷达获得船舶的实时方位,并结合船舶的方位,对所采集信息进行筛选,将筛选的信息通过计算机处理,生成虚拟信息。
5.2仿真结果分析
當检测目标船存在时,该系统可以实现船舶识别。实验中发现直接计算所得的位置显示增强信息,会使增强信息遮挡目标船,为达到较好的目标船与增强信息融合效果,在不影响目标船与增强信息配准的条件下,增强信息显示达到理想效果。
6结论
本文提出的一种面向盲区的船舶视觉辅助瞭望方法可以应用于船舶航行辅助瞭望。它通过实现虚拟图像与目标船现实场景的融合,使驾驶员在平视状态下获取目标船信息,快速做出船舶避碰决策计划,降低了船舶碰撞危险。
参考文献:
[1]马丽,苗露.无线传感网络覆盖盲区检测方法[J].信息通信,2020(07):54-55.
[2]王世彤,李书林,陈鑫鑫,崔素萍,王辛岩.应用5G来解决因视野盲区所引发交通事故的技术研究[J].科学技术创新,2020(27):81-82.
[3]彭同兴,王丙龙,林伟权,周滔,鲍向文,王灏荃.弯道盲区可视化安全行车装置设计与研究[J].山西电子技术,2020(04):77-79.
[4]刘武艺. 基于增强现实技术的船舶值班瞭望辅助系统研究[D].集美大学,2020.
[5]孙伟,杨一涵,王野,李亚丹.基于BEEMD的单目测距图像区间阈值降噪算法[J].电子科技大学学报,2020,49(04):563-568.
