尹公洲单向控制段会船沟通平台建设的探讨
2020-01-03郑立新车前程曹金海
郑立新 车前程 曹金海


摘 要:探讨受控船舶在尹公洲单向控制段的会船沟通机制,对改善受控船舶在该水域的沟通联络和通航效率有着重要意义。尹公洲单向控制段作为长江下游著名的狭窄航段,大型船舶在该水域航行时需要单向通航,产生了会船通信的需求。目前,受控船舶间的会船通信主要在甚高频的公共频道上进行,易受干扰且效率较低,同时还占用信道资源影响其他正常通信,并影响VTS的正常工作。本文通过对现行会船通信机制进行分析,了解存在的问题和产生问题的原因,并针对性的提出改善建议。
关键词:尹公洲;单向控制段;会船通信;平台
长江尹公洲航段以其航道弯曲狭窄而为世人所知,素有“老虎口”之称。船舶航经该航段时,需经历两个90度的弯道和一个狭窄航段,这给船舶的通航安全带来很大影响,大型船舶尤为明显。为改善该水域船舶的航行安全,海事部门将部分航段划定为单向通航航段。但随着船舶大型化的加剧和12.5米深水航道的开通,来往的大型、超大型船舶的增多,带来会船通信量的越来越大,已出现会船联络机制越来越不能满足实际使用需求的情形,给船舶通航安全带来潜在隐患。为了解决现有问题,本文探讨其他可行的通信途径,来弥补现行通信机制的不足。
1 现状
随着12.5深水航道的开通和船舶的大型化,尹公洲单向控制段的受控船舶越来越多,现行的会船协商机制成为通航发展的制约因素,研究尹公洲航段特征、船流规律和会船协商机制成为改善制约的基本需求。
1.1航段特征
受地形和水流量影响,长江尹公洲航段(长江100号浮至长江105-1号浮)呈现“Z”形,整个航段内有两个90度的弯道和一个狭窄航段。为保障船舶在该航段内的通航安全和通航秩序,主管机关将上、下端航段设定为单向控制航段,即100-101号浮和104-105~1号浮,实施单向通航管理;同时,在航段中段的90度弯道处,对受控船舶施行避免会船的要求。如图1所示。
1.2船舶流量特点
尹公洲航段为京杭运河与长江的交汇航段,每日间大量的船舶航经该水域,既有国外的大型海轮,也有运河的船队,水上交通十分繁忙。VTS作为水域的监管中心,承担着信息传递交换、交通组织等工作,每日间大量的船舶在VTS工作频道上进行动态报告和通信对话,2020年1-6月以来镇江航段的船舶流量统计,如表1所示。
从表中可以看出,2020年上半年以来,镇江辖区日均通航船舶数约1341艘次,其中向VTS中心进行动态报告的船舶约140艘次,占通航总数的10.46%。VTS中心接报的船舶数中,在尹公洲航段通航尺寸范围内(110~230米)的受控船舶数约有82艘次,占VTS接报总数的58.69%。
1.3会船通信机制
目前,受控船舶间在尹公洲单向控制段前的会船通信主要在甚高频(VHF)上进行,根据实际可将会船通信机制分为识别发现和通信协商两步骤,如图2所示。
現行的识别发现途径有:①驾引人员通过在VHF公共频道上的值守和AIS信息;②驾引人员在VTS工作频道上询问VTS值班人员来获取相关受控船舶信息和动态;③VTS的值班人员根据受控船间的会遇态势,主动对相关船舶进行信息服务、交通组织,并提醒相互间开展会船通信。
受控船舶间识别发现后,需要对通行单向控制段的顺序进行沟通,会船沟通的特征有:①基本在VHF频道上进行,常见于VTS工作的09频道、长江公共的06频道或者双方约定的频道;②通信协商的内容会涉及到动态、意图的表达和交换,并协商会船地点和通行顺序;③完整的协商通信是一个过程,需要多次成功的通信对话,而其中困难者需要多次通信协商。
2 问题
随着受控船舶在VHF上通信沟通的常态化和船舶通信总量的增多,现行的会船通信机制在实际使用过程中,也带来了诸多问题。
2.1存在遗漏
长江镇江段内每日间通航船舶数量大,仅VTS接报的受控船舶就约82艘次,其中含有大量的受控江船。然而江船与海船之间在船用设备、法规遵守、人员素质等方面的差异,以及单向控制段上会船意识的淡薄,都可造成受控江船不参与会船协商通信,产生遗漏。
2.2占用通信资源
江中船舶间的通信主要通过甚高频,由于高频信道总数和时段资源的有限性,造成可供通信资源的有限性。目前,尹公洲航段受控船舶间的会船通信主要集中在VHF06和09频道上,占用了信道上大量的时段资源,造成会船通信在通信资源的占用比例过高的现象,影响到频道上的其他通信。
2.3增加VTS负担
单向控制段的会船通信机制中与VTS存在交集的情况:①识别发现环节中,为获得相关受控船舶的数据和动态,驾引人员常会通过询问VTS中心来获取;②后续会船协商中,当出现两船会船意图难统一的情形时,VTS中心会被请求或者主动介入,协调两船间的会船顺序。上述情况中与VTS相关的工作,非属VTS的本身职责,是额外的工作,增加了VTS的工作量。
2.4易受干扰
由于受控船舶间识别发现中对VTS的过分依赖,当VTS出现设备故障、人员疏漏以及处理更重要的事务时,都会影响VTS的“桥梁”作用,从而影响后续的通信。同时,由于船舶间的通信过于依赖甚高频,当甚高频信道上嘈杂或其他通信介入时,都会对正常通信造成干扰。
3 原因分析
尹公洲单向控制段现行的会船通信机制下产生的诸多问题,根源在于船舶间发现、通信等方面的路径太过单一,造成对VTS和甚高频的过分依赖。
3.1发现难
受控船舶间发现难的主要原因有:
(1)工作量程小。长江镇江段船舶密集,航段条件复杂,船舶通常在使用雷达、电子海图、船E型、船讯网等设备系统时,为方便观察周围情况,会选择较小的工作量程,很难跨过尹公洲航段进行观察。
(2)AIS辨识度低。现行的A、B两类AIS设备,受控船舶中均有使用,无法通过终端显示符号进行区分;同时,混在密集船流中的受控船舶AIS信息,筛选识别十分困难。
(3)主观能动不足。实际观察发现,受控船舶中仅有极少量的船舶会主动表明自身动态意图,来寻求相关受控船舶联系,其余大部分都依赖于询问VTS、VTS提醒和他船联系,主观能动性不足。同时,受岸线和船流的影响,受控船舶很少主动使用大量程去发现。
(4)VTS依赖大。当视距外的受控船舶很难通过AIS进行分辨时,VTS的“桥梁”作用最为有效,成为受控船舶间识别发现的首选。尹公洲航段岸线弯曲、视线的受阻、AIS筛选的困难,造成会船沟通中对VTS的过分依赖。
3.2通信难
受控船舶间通信难主要受以下因素影响所致。
(1)途径单一。VHF因在超视距、近距离上通信的优势和船舶强制值守的优点,成为船舶间通信、呼叫的首选,而其他通信方式在陌生人间使用的困难,最终导致VHF通信成为受控船舶间会船通信的主要选择。同时,船舶值守频道的集中,更造成会船通信集中于有限的几个频道上,极易互相干扰,影响通信效率。
(2)通信需要过程。受控船舶间的会船协商通信常需要经历船舶识别、信息交换、会船协商等诸多过程,而每一过程都需要时间,成功的会船通信是建立于大量有效的通信基础上。
(3)VHF工作模式。船用甚高频通信不同于电话通信,其工作模式是单工状态,即收发不同步,通信对话是对答模式,需要占用更多的通信时间。
(4)通信量大。尹公洲航段受通航环境限制,分别在上、下两端设定单向控制段,受控船舶在整个尹公洲航段时需要分别对两个控制段的会船顺序进行通信协商,通信量翻倍。
3.3等让难
尹公洲航段独特的通航条件,使得受控船舶间的会船地点需要避开单向控制段和中段90度弯道处,导致可供船舶操纵的空间被进一步压缩,给船舶的等让带来很大不便。
3.4其他原因
内河受控船舶驾驶员对单向控制段适用法规的不熟悉,以及沟通意识的淡薄,造成内河受控船舶在会船通信上参与度较低。此外,其他通信方式在陌生驾引人员间的应用困难,造成过于依赖于甚高频的现象。
4 改善建议
解决受控船舶尹公洲单向控制段内的协商通信问题,实质上是解决通信需求和容量间的矛盾。主要解决途径是减少对VTS和甚高频通信路径的依赖,建立更多的船舶识别和通信沟通路径。
4.1建立受控船舶数据库
为方便对受控船舶的识别和监管,降低临时识别的难度和AIS信息的依赖,管理机构可建立受控船舶数据库,来解决受控船遗漏和提高管理效率。管理部门可将受控船相关的船公司、船员单位和引航机构罗列组建管理数据库,同时将受控船舶、驾引人员统筹组建终端通信和管理数据库。
4.2宣传引導
对不参与尹公洲单向控制段会船沟通的受控船舶,主管机关应加大对其驾驶人员和船公司的宣传力度,告知单项控制端会船沟通的重要性,提高驾驶人员的安全意识和守法意识,引导他们主动参与会船沟通。具体可通过航行警告、航行通告的发布,微信、抖音、新闻媒体等平台的信息推送,资料的现场发放,会议传达等途径来宣传。
4.3开拓通信新路径
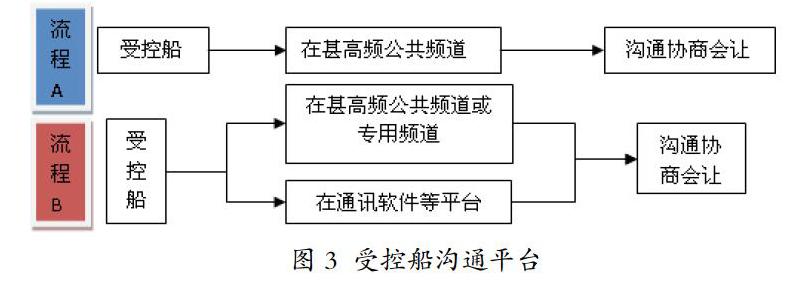
尹公洲单向控制段会船通信之所以满足不了通信需求,主要原因是船舶间的通信路径单一,形成通信路径“串联”化,极易造成信道拥堵。若提高通信效率和稳定性,开设更多的会船通信路径,将通信路径“并联”化,是有效的解决办法。如图3所示。
实现通信路径的“并联”化,可采取的措施有:①在VHF CH06、09等公共频道外,建立专用于尹公洲单向控制段受控船舶间的会船通信的频道,供船舶间会船通信使用。②利用长江航段离岸近,移动通信方便的优点,引入QQ、微信、钉钉等通信软件,将受控船舶的数据库与通信软件结合,将会船通信转至通信软件上进行,来释放甚高频资源。
4.4提高受控船舶识别度
提高受控船舶在会船前的自主识别发现,可有效降低对VTS的依赖,并减少高频资源的占用。具体可行的措施有:①在现行的船用船舶监控平台上,将受控船舶用独特符号或标志予以显示。如在船E行终端、船队在线HiFleet、船讯网等平台上将受控船舶用独特的标志显示,降低发现难度。②在受控船舶数据库的基础上,将数据库中的船舶在船讯网、船队在线HiFleet等船舶监控平台上,利用相互关注、船队管理等功能,来提高自主识别。③在AIS自动发送的信息码中,编制表明受控船舶的信息码,以在AIS设备接收端、电子海图上显示出独特性,方便识别。
4.5开发新平台
尹公洲单向控制段的会船通信需要经历识别发现和会船沟通两步骤,可开发集船位识别与通信功能为一体的平台或者APP,来改善受控船舶间会船通信。平台或者APP可设有船位自主报送,通信、船位跟踪、信息提醒等功能,以此来降低对VTS和VHF的依赖,提高会船沟通的自主性和效率。
5 结束语
尹公洲单向控制段会船通信上的弊端,通信需求和资源有限性的矛盾,都需要变革现有的会船沟通模式,引入更多的会船沟通平台,将路径“并联”化,降低对VTS和VHF的依赖性,来提高会船沟通的稳定性和效率。
参考文献:
[1]江苏海事局.长江江苏段船舶定线制规定(2013)[EB/OL]. https://www.js.msa.gov.cn/art/2019/6/19/art_842_141.html ,2019.
[2]江苏海事局. 中华人民共和国江苏海事局船舶交通服务系统安全监督实施办(2013)[EB/OL]. https://www.js.msa.gov.cn/art/2019/7/17/art_65_1124052.html,2019.
