VSM交直流混合微网控制
2020-01-03矫德强
矫德强, 赵 宪
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
0 引 言
随着微电网技术的发展,交直流混合微电网引起了人们的注意[1],交直流混合微电网(混合微网)的运行结合了交流微网和直流微网的优点。混合微网由交直流子系统通过电压源变换器(Voltage Source Converter, VSC)互联组成,混合微电网有两种不同的运行模式,即并网模式和孤岛模式,保持交流子网的频率和直流子网的电压在可接受的标准范围内运行是最重要的问题。可再生能源(Renewable Energy Sources, RES)的高穿透性影响混合微网内的频率和电压,从而影响其稳定性,双向变换器(BC)控制通过子网之间双向功率的合理分配是保证混合微网稳定运行的关键。起初,电力电子接口是集成不同类型分布式能源进入不同微网运行模式的重要组成部分,由于电力电子接口的诸多优点和它所提供的优越性能,功率转换器已经成为一种实用的可再生能源接口方式。文献[2-3]提出了外特性为电压源的电压控制型虚拟同步发电机(Virtual Synchronous Generator, VSG),其本质主要考虑了有功-频率、无功-电压的关系,为系统提供稳定的频率和电压支撑,在渗透率较高的电网环境下应用广泛。然而,不同于同步电机(SM),RES接口的功率转换器因缺乏支持交流系统频率和电压控制所需的惯性,对改善系统稳定性无效。因此,高渗透水平的VSC也会导致稳定性问题并影响系统动态稳定[4]。
独立的微电网被认为是一个弱系统,因为交流侧没有频率支持,直流侧没有直流电压支持,因此,交直流子微网之间功率的合理分配对微电网的稳定性至关重要,发电或负载条件的变化会导致大的频率偏差,可能会使系统不稳定[5]。文献[6]指出,增加交流微电网的负荷会使主导系统极点移到一个不稳定的区域。文献[7]对微电网中功率波动时的 VSG 储能单元进行设计,保证了直流母线电压的稳定。因此,混合微电网的稳定性不仅依赖于交流微电网,还依赖于直流微电网。此外,通过双向转换器供电或吸收电能,不仅影响交直流子网的动态和性能,还可能导致整个混合系统的不稳定运行。关于功率分配,文献[8]引入虚拟阻抗,并提出一种改进的下垂控制,提高了并联转换器有功均分效果,但无法实现无功均分。文献[9]针对孤岛运行的交直流混合微电网提出一种功率协调控制策略,研究了混合微网的自主运行。文献[10]提出了应用双向转换器(BC)合理分配功率的概念。
文中通过应用结合VSC和SM特性的虚拟同步机(VSM)控制器的概念来解决上述问题。电力电子转换器的VSM控制算法可以添加到转换控制器中,使其像SM一样工作。该算法将虚拟惯性和虚拟阻尼引入到接口变换器的回路控制器中,在SM的实际操作中,VSC没有物理惯性质量。文中主要创新点是提出了一种新的控制算法,使双向转换器作为同步电机来支持孤岛运行模式下交流子网电压和频率以及直流子网的电源。文中还将基于VSM的双向转换器自主功率分配作为第二创新点,所提出的控制器由内环电流和外环电压两个控制器组成,电流控制环的优点是对转换器的保护,使其免受过流的影响。该控制算法也适用于双环电流控制器的不平衡混合系统,所讨论的系统基于平均VSC模型,显示混合微网的配置及其参数;应用PSCAD进行仿真,将提出的控制算法与传统电流控制器算法进行对比,揭示其优势,给出了仿真结果和分析;最后给出结论。
1 交直流混合系统配置和控制结构
文中使用的交直流混合微电网配置如图1所示。
交流侧由风能发电与柴油发电供电,电流先通过整流器进行过滤,再通过逆变器将电能供给交流负载,存在一块电池板为交流侧后备电源。直流侧由光伏阵列与电池板供电,电流通过整流器过滤后直接配送给直流负载,交流子微网与直流子微网通过双向转换器连接。
直流子系统逆变器的控制结构是基于级联电压和电流控制,如图2所示。
交流子系统和双向变换器的控制结构基于电流和电压控制器同步参考框架如图3所示。
BC控制器只包括电流环和电流基准,由下垂控制器控制[11],参考数据见表1。
1.1 交流微网
交流子微网中的分布式发电(Distributed Generation, DG)单元由直流电源供电的三相电压源变换器(VSC)组成,无论是用直流电压源表示的可调DG或非可调DG均由传统下垂方案控制,每个DG单元根据预定义的下垂增益提供负载。因此,当系统参数对称时,为了使所有DG单元具有相同的功率分配,下垂增益也应该是相同的。此外,DG单元之间的平等功率共享为系统提供了稳定裕度[12]。DG机组必须满足交流子网有功电源的供电要求,每个DG注入的总功率之和必须等于共同的交流负载功率之和

(1)
式中:PACload——总交流负载功率;

n——变量,连接到AC微电网的DG单元数。

图1 交直流混合微电网结构
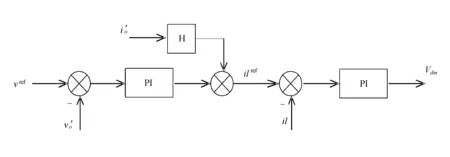
图2 直流DG机组的级联电压和电流控制
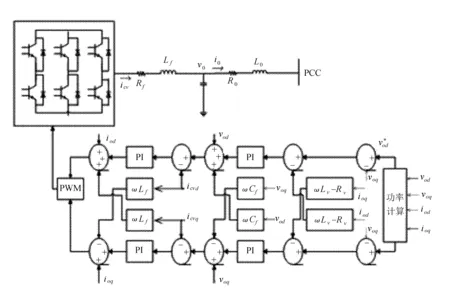
图3 包含虚拟阻抗级联电压和电流控制器的控制块
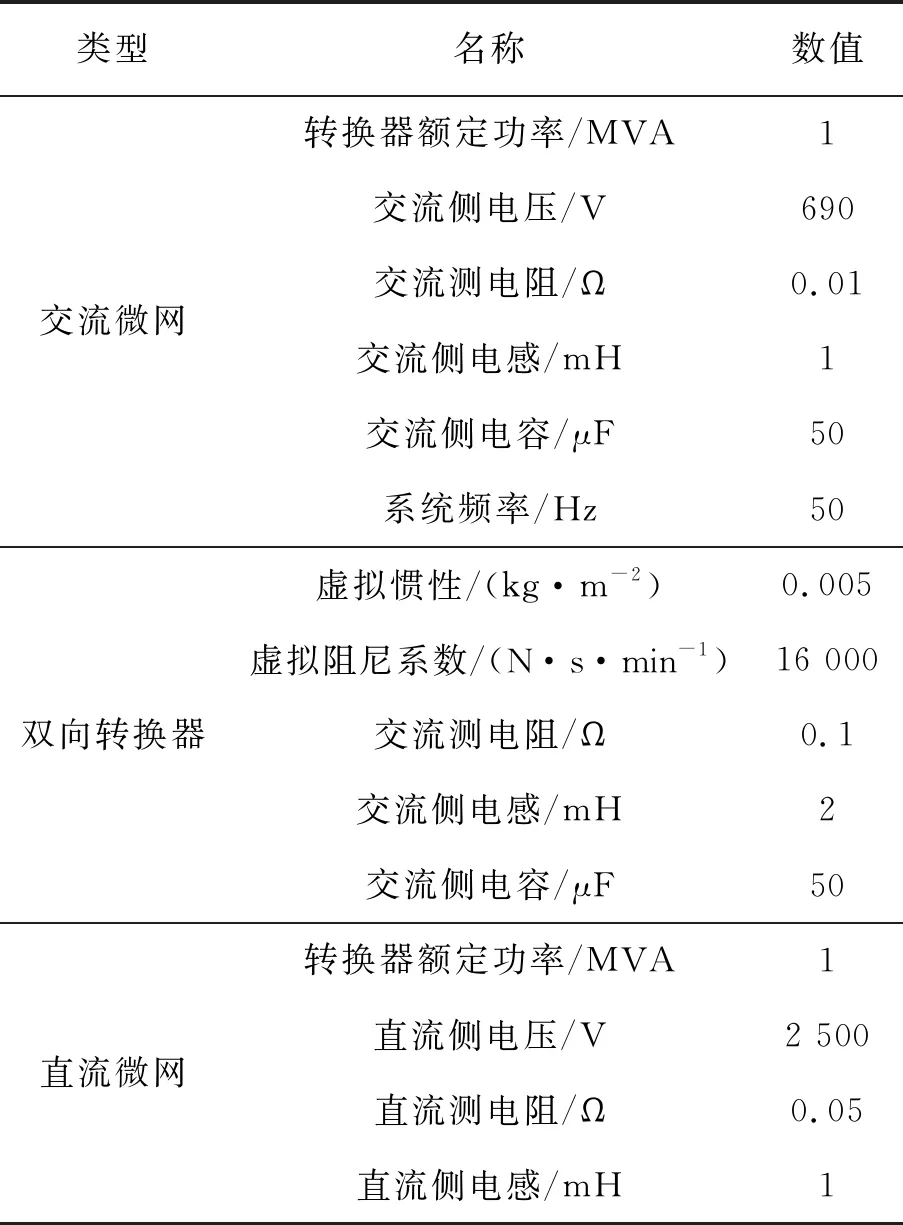
表1 交直流混合微网的参数配置
1.2 直流微网
每个DG单元在直流子微网中由来自直流电源供能的半桥DC-DC变换器组成,直流子网中的直流母线电压是基于下垂控制的DG单元,下垂控件与AC子网类似,每个DG单元根据预定义的下垂增益提供负载。每个DG单元注入的总功率之和必须等于共同的直流负载功率之和

(2)

1.3 混合微网的自主控制
交流子微网的自主运行主要是基于下垂控制,其供电功率是有功还是无功取决于系统的频率和在公共耦合点(Point Common Coupling, PCC)上的交流电压[13],增加交流负载降低了系统的频率,使DGS提供更多有功功率的标志,反之亦然。另一方面,降低PCC点的交流电压是DGS提供无功功率的标志。因此,采用矢量控制可以实现独立的有功控制和无功控制。
直流子微网的自主运行类似于交流子微网,直流电压水平决定所需的注入功率,直流电压的变化是DGS通过注入有功功率来维持直流电压的主要信号。由于电阻线的压降,直流微电网中所有具有相同下垂系数的DGS并不能分配相同的功率。与交流和直流微电网相比,基于下垂控制的双向转换器的自主运行有很大不同,BC基于下垂控制可以自主控制,这是通过测量其交直流终端的交流子网频率和直流子网电压电平和来确定的。因此,控制基准由与交流微网频率相关的交流下垂和与直流微网直流电压相关的直流下垂之和组成。BC的交直流组合下垂特性的数学表达式如下:

(3)

(4)
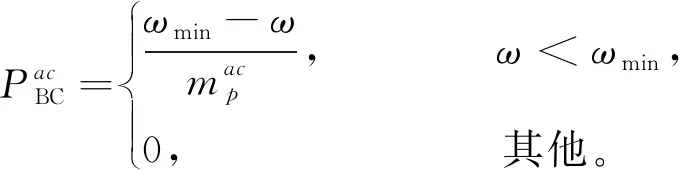
(5)
当BC功率基准由式(3)确定后,在只使用电流控制器回路的情况下,通过将电源基准除以电压大小可以找到输入电流控制器的电流基准。
2 仿真结果及分析
研究中使用的系统模型由在PSCAD/EMTDC中构建的平均VSC模型组成,文中的研究主要集中在从直流到交流和从交流到直流的功率交换。此外,还将基于新型VSM控制器和传统电流控制器回路的混合微电网进行了对比分析。
在这种情况下,两个混合微电网具有相同的操作条件,在欠载条件下两个子系统的负载功率变化特性仿真如图4所示。
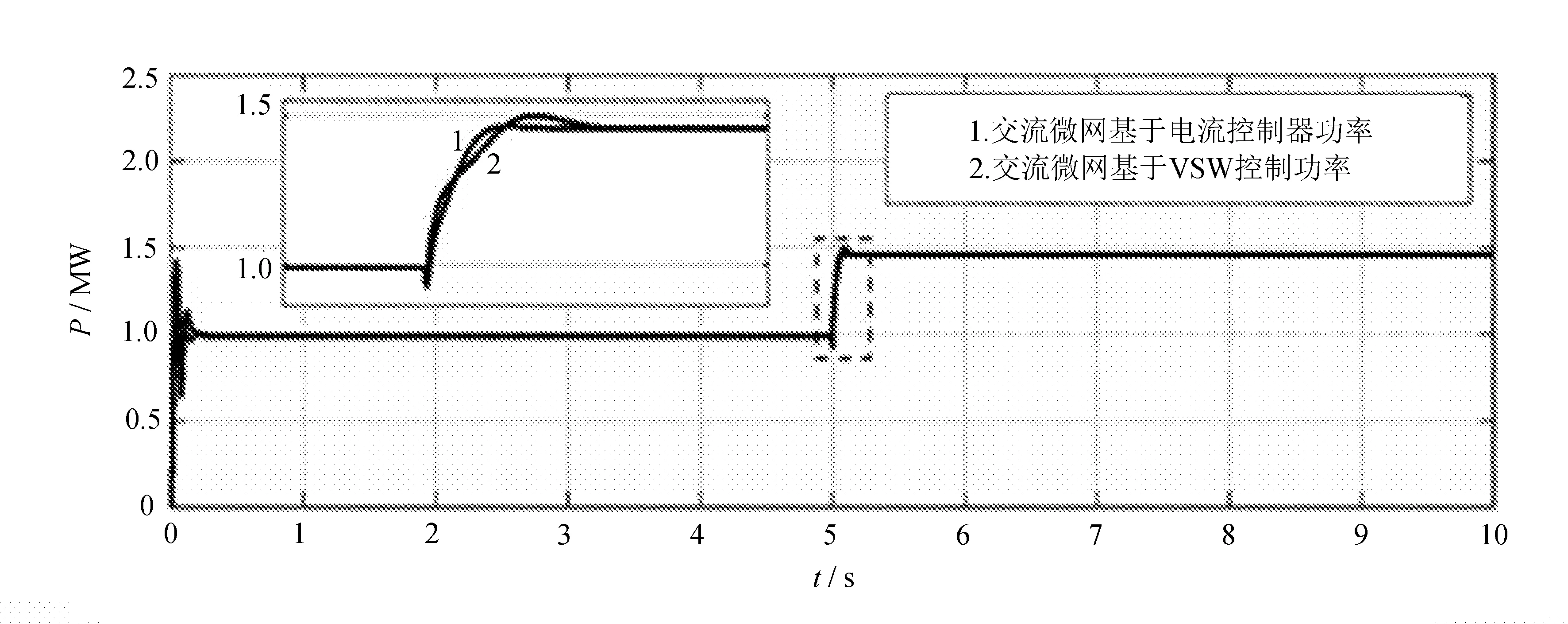
图4 交流微网在欠载条件下的负载功率变化
最初交流子系统为交流负载提供功率1 MW,而直流子系统提供0.8 MW,在t=5 s时,交流负载功率增加到1.5 MW。
欠载条件下的BC功率交换如图5所示。
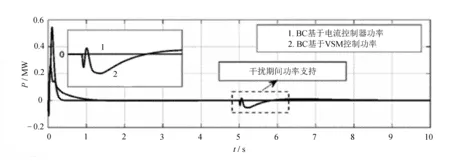
图5 欠载条件下的BC功率交换
图5中,在反应缓慢的过渡时期供电可能更可取,更好的情况是由控件提供的,仅基于电流控制器的BC没有显示这一特性。如图4和图5的开头所示,提出基于VSM控制改进了交流子系统中DGS的启动瞬变,减少了超调。
由于BC控制器中存在VSM,惯性的影响导致转换器功率受影响。直流微网在欠载条件下的负载功率变化如图6所示。
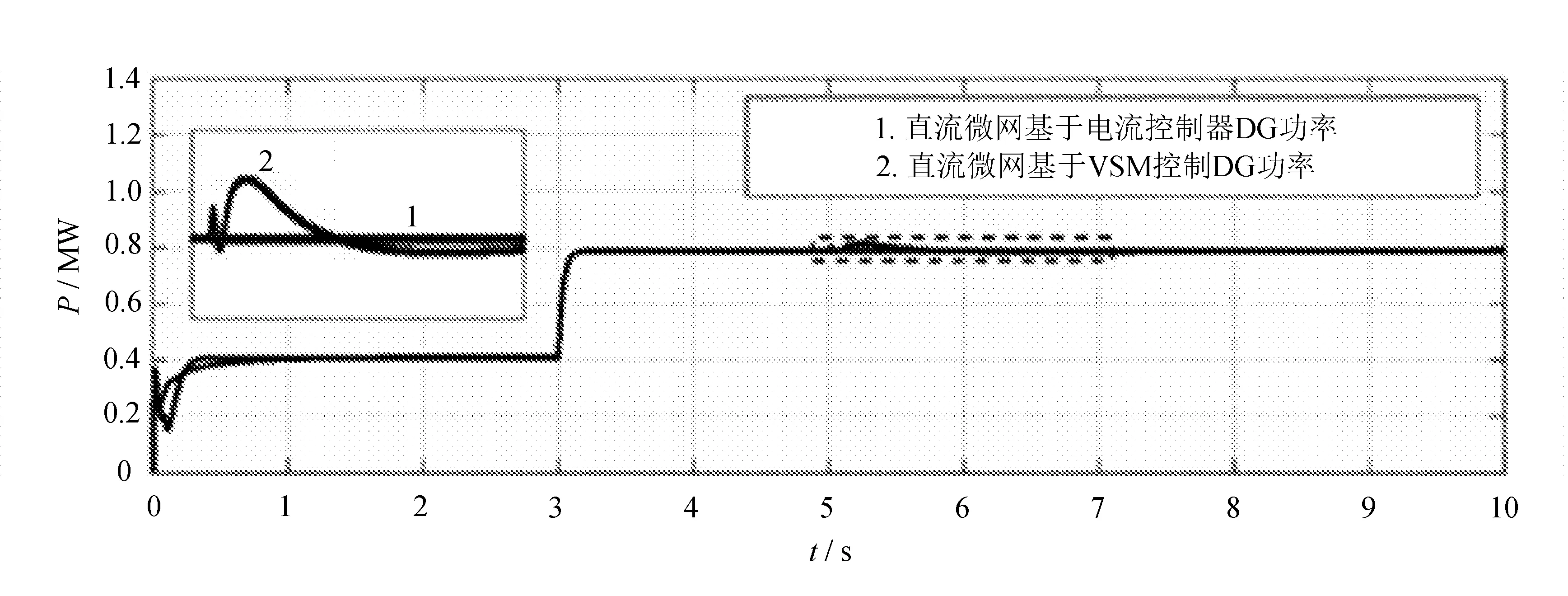
图6 直流微网在欠载条件下的负载功率变化
图6中,在t=3 s时,直流负载功率从0.4 MW增加到0.8 MW,因此,对交流子系统没有任何影响。在这种情况下,两个子系统都在欠载条件下工作,因此两个子系统DGS单元仍然可以提供更多的额外功率,相当于每个DG机组均分0.2 MW。
惯性是指由双向转换器提供的一段短时间内的功率,代表了频率变化过程中的旋转质量。从图5和图6中可以看到,在t=5 s时,由于直流子网的下垂控制特性,直流电压跟随VSM动作并且从直流微网到交流微网的功率转换用了很短的时间。此外,直流子系统中的DGS单元在暂态扰动下供电,因此直流DGS单元也跟随VSM动作,直流微网在欠载条件下的母线电压如图7所示。
图7 直流微网在欠载条件下的母线电压
3 结 语
介绍了交直流混合微电网中基于VSM的集成电路控制,VSM控制策略在不同的负载情况下,保证了交流和直流子网之间精确的双向功率潮流。
对基于BC的两种不同控制结构的混合微网进行了研究和比较,实验研究表明,在不同负载条件下,由于交流电压降低负荷,VSM算法比只使用电流控制回路更有效。仿真结果表明,所提出的控制策略提高了整个混合微电网的性能。通过在PSCAD/EMTDC环境下模拟测试系统,验证了VSM控制算法对混合微电网的影响。
