一种新的基于SCM-ANFIS的加速度计温度建模与补偿方法*
2020-01-02付红坡温云同苗风海王晓东
付红坡,温云同,苗风海,王晓东
(北京航天控制仪器研究所,北京 100039)
石英挠性加速度计(以下称加速度计)因其体积小、响应快、灵敏度高等优点,在我国国防军工与民用领域得到了广泛应用。作为捷联惯性导航系统的关键敏感元件之一,其输出直接影响到导航系统的精度[1]。在加速度计研究与应用中,温度漂移是目前影响加速度计精度最主要的因素之一,成为高精度加速度计研究与工程应用的难题。
目前解决温度漂移的系统级措施主要有两种:温度控制和温度补偿。温度控制:增加温度控制系统,使加速度计工作在温度相对稳定的环境中,以抵抗外界温度变化的影响。但是温控系统启动时间长、功耗大,不能满足惯导系统快速启动、低功耗的应用需求。温度补偿:在导航计算机中写入温度补偿程序,然后根据加速度计实时温度对输出进行修正,从而提高加速度计的精度。该方法实现简单、启动快、无功耗,适合要求快速启动、体积重量小、功耗低的应用领域,但是软件补偿难点在于建立准确度高的加速度计温度漂移模型[2]。
在对温度补偿建模的研究中,文献[3]中利用比力差分与最小二乘法进行数据拟合建立加速度计温度漂移模型;文献[4]用多项式插值法建立加速度计温度漂移补偿模型;文献[5]建立基于神经网络的加速度计温度漂移补偿模型;文献[6]将最小二乘向量机用于加速度计温度效应建模与补偿;还有模糊算法[7]、智能算法[8]等用于温度补偿。上述方法在加速度计温度漂移建模方面取得比较好的效果。但是经常存在两个问题:分别对零偏与标度因数建模补偿,容易造成重复误差;采用单一方法建模导致模型简单不能详细描述加速度计复杂的温度漂移。
对于前者,本文设计一种整体式的温度补偿模型结构,可以消除重复误差;对于后者,将模糊推理系统与神经网络相结合,并融合减法聚类算法建立温度模型,能够更详细的描述的加速度计复杂的温度漂移,并进行高精度的补偿。经过实验证明,该方法能够对加速度计温度漂移进行高精度的建模,并进行有效的温度补偿,相比于之前精度提升1到2个数量级,具有一定的应用价值。
1 石英挠性加速度计温度漂移分析
1.1 基本模型
石英挠性加速度计是一种机械摆式加速度计,主要由表头与伺服电路组成,原理图如图1所示。

图1 石英挠性加速度计工作原理
当外部有加速度作用时,摆组件发生微小偏转,则差动电容传感器的电容量发生变化。伺服放大器检测到这一变化并转换成相应的输出电流反馈给力矩器。在电路中接入读出电阻,可以测出电压信号。
在重力场中石英挠性加速度计的简化数学模型为:
U=K0+K1a+K2a2+Kipa
(1)
式中:U为加速度计输出,K0是零偏,K1是标度因数,K2二次项系数,Kip是静态交叉耦合系数,a是输入加速度。从式(1)中可以看出,由于K2与Kip量级很小,对加速度计的输出影响非常小,因此K0与K1是影响石英挠性加速度计输出值的主要参数。
1.2 温度漂移机理分析
经过分析得到,在加速度计工作工程中,造成零偏温度漂移的主要因素为:温度引起的表头结构热变形、信号传感器零位偏移、电容检测器热增益、电容极板间隙变化。造成标度因数温度漂移的主要因素为:石英摆片的线涨系数、磁钢的温度系数、线圈的温度系数。但由于石英摆片的线涨系数在10-6/℃以下,因此不考虑石英摆片的热性能的影响。
1.3 温度漂移实验
为研究加速度计的温度漂移特性,设计如下多位置全温域标定实验:测试平台分度头寻零完成之后,分别在-40 ℃到70 ℃之间每隔5 ℃选取一个温度点作为温控箱温度设定值,温度变化0.1 ℃~0.5 ℃,每个温度点通电保温半小时。在每一个温度点下,进行24位置翻滚测试,得到加速度计在24位置下全温域测试输出。
加速度计正常测试温度为55 ℃,为了能够表现加速度计的温度漂移,以输入加速度与实际温度为变量,以实际输出相对于加速度计55 ℃时的输出相对误差为因变量,得到图2所示加速度计温度漂移图形。

图2 加速度计输出温度漂移
由图2可知,输入一定时,相对于标准温度,由于温度的变化造成的加速度计输出漂移最大达到了5 mV(相当于5 mgn),而高精度导航系统要求加速度计的温度稳定性量级为1 μgn。因此可知加速度计的温度漂移严重影响了惯导系统的导航精度,因此必须进行加速度计的温度补偿。
2 石英挠性加速度计温度漂移模型设计
2.1 模型分析
2.1.1 零偏温度实验
设计恒温零偏实验:测试平台分度头寻零完成之后,分别从-40 ℃到70 ℃之间每隔5 ℃选取一个温度值作为温控箱温度设定值,温度变化0.1 ℃~0.5 ℃,每个温度点通电保温半小时。保温完成之后在每一个温度点下,进行0°与180°位置测试,计算得到加速度计的零偏温度数据。得到如图3(a)所示的零偏随温度变化与图3(b)所示的零偏温度漂移曲线。由图3(a)可知,零偏随着温度的变化一直在改变;由图3(b)可知,相对于55 ℃时的零偏,由于温度的变化造成的零偏漂移达到了1.7 mg,漂移程度较大。

图3 加速度计零偏温度曲线与温度漂移
由分析可建立式(2)所示的零偏温度漂移模型:
K0=fK0(T)
(2)
2.1.2 标度因数温度实验
设计和1.3节一样的多位置全温域实验。得到在-40 ℃到70 ℃的24位置的加速度计输出。然后再用2.1.1中的零偏结果计算全温范围内的标度因数。计算公式如下:
(3)
式中:U(T,a)是温度为T,输入加速度为a时的加速度计输出。
利用式(3)计算得到各温度各输入加速度下的加速度计标度因数随温度变化与标度因数的温度漂移曲线如图4所示。从图4(a)中可以明显看出标度因数值不仅与温度有关,而且与输入角速度有关。从图4(b)中可以知道,相对于55 ℃时的标度因数,由于温度的变化造成的标度因数漂移达到了6 mV/gn,漂移较大需要进行温度补偿。而且可知标度因数温度漂移不但和温度有关,还和输入的加速度有关。

图4 加速度计标度因数温度曲线与温度漂移
根据以上分析可以建立式(4)所示的标度因数温度漂移模型:
K1=gK1(T,a)
(4)
2.2 模型设计
2.1节中分别建立了零偏与标度因数的温度漂移模型,如果以此来进行温度建模与补偿,就会两次引入建模误差,对建模精度有一定的影响。因此本文设计一种整体温度补偿模型。具体如下:
由式(2)、式(4)可以得到加速度计的输出模型为:
Ua=U-K2a2+Kipa=K0+K1a=fK0(T)+
gK1(T,,a)=h(T,a)
(5)
式中:Ua为除去二次项与交叉耦合系数影响之后加速度计实际输出。对加速度计进行温度补偿的目的是使其输出只与输入角速度有关系,不受温度变化的影响,由于加速度计正常测试时的温度为55 ℃,因此设温度补偿完的加速度计输出为:
Nc=K0c+K1ca
(6)
式中:Nc为55 ℃时的石英挠性加速度计输出,K0c,K1c为55 ℃时的零偏与标度因数常数。
由2.1节实验结果与式(5)可知,加速度计的输出同时受温度与输入加速度的影响呈现非线性,为降低温度变化对加速度计输出的影响,提高加速度计输出的精度与温度稳定性,本文基于加速度计内部传感器提供的温度数据、测试条件下的输入加速度以及加速度计的实际输出,建立加速度计工作温度与实际输出到理想输出的映射模型:
Nc(a)←t(T,N)=t[T,h(T,a)]
(7)
3 温度漂移建模方法
3.1 自适应神经模糊推理系统(ANFIS)
ANFIS是将模糊推理系统(FIS)与自适应神经网络(ANN)相结合一种神经网络结构,它综合了FIS的模糊推理能力与ANN的自适应学习能力,广泛应用于解决非线性系统建模与控制问题[9-10]。ANFIS结构是基于T-S型模糊系统,if-then模糊规则如下:
Rule:ifxisAandyisBthenz=f(x,y)
式中:A和B分别是输入变量x,y的模糊集,z是一个去模糊化的输出变量。本文设定ANFIS为二输入单输出结构,输入隶属度函数为Gauss函数,输出隶属度函数为Liner函数,模糊推理规则如下所示:
Rule1:ifxisA1andyisB1thenf1=p1x+q1y+r1
Rule2:ifxisA2andyisB2thenf2=p2x+q2y+r2
(8)
式中:Ai和Bi分别是输入变量的模糊集,pi、,qi,ri是结论参数。
本文的ANFIS网络结构如图5所示,该系统包含五层,每层包含由节点函数描述的若干节点。
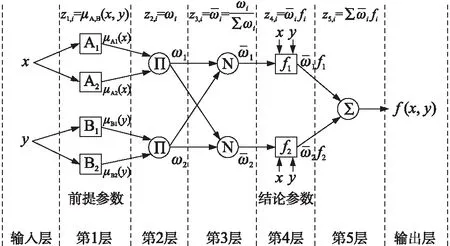
图5 ANFIS网络结构
各层功能描述如下:
第1层:输入层。该层的节点执行模糊化操作,把数值输入转化为模糊子集的隶属度值。输入层隶属度函数为Gauss函数,如下所示:
(9)
式中:ci、di,σi,ηi是前提参数,他们定义了输入变量隶属度函数的形式。
第2层:规则层。节点执行各输入变量的隶属度函数相乘,如式(10)所示。其中节点i的输出ωi称为激活强度,表示规则i的数值变量的激励强度。
z2,i=ωi=μAi(x)μBi(y)
(10)
第3层:正规化层。正规化规则层的输出激励强度。该层节点i的输出可以作为规则i的输出在最终输出中的比重。
(11)
第4层:结论层。该层节点计算每条规则的输出,节点函数为:
(12)

第5层:输出层。得到去模糊化后的系统总输出。节点函数为:
(13)
ANFIS是具有前向通道与反向通道的多网络层结构,任意两层间的连接权系数能够对数据对象进行训练操作来不断自我调整。ANFIS中的学习算法是一种梯度下降与最小二乘的混合算法。在前向通道中,输入输入向量,用线性最小二乘估计对模糊规则后件的结论参数进行估计,从而得出每一组输入量输出误差的大小;在反向通道中,采用梯度下降法,对前提参数进行估计,同时利用梯度下降法将训练误差从输出节点反方向传递至输入节点。然后反复训练,直到误差达到要求或者所设定迭代次数结束操作。
3.2 减法聚类算法(SCM)
在ANFIS模型中,每个输入变量的隶属度函数个数和模糊规则都是不确定的,多是依靠经验和不断尝试去确定,主观性强且步骤复杂和耗时耗力。然而采用减法聚类对样本数据进行聚类估计,以决定输入变量的隶属度函数个数和模糊规则可大大简化模型生成步骤,缩短时间,减少人为误差。
SCM是用于估算原始数据存在的聚类数目以及聚类中心位置的聚类算法,它仅仅依据原始数据就能够快速得到数据的聚类中心而无需事先设定聚类中心的个数。在训练集数据中的N个数xi=(x1,x2,…,xn)。因为任意数据点都是潜在的聚类中心,所以数据点处的密度的计算公式为:
(14)
式中:Di是数据点xi处的密度指标,ra是聚类半径。当得到所有数据点密度大小之后,将第一个聚类中心选定为密度值最大的数据点。在计算下一个聚类中心密度值时,需要去除第一个聚类中心的影响:设xc为选定的数据点,Dc为的密度值,那么第二个数据点的密度值计算公式为:
(15)
式中:rb是密度值显著减少的邻域半径。显然,靠近第1个聚类中心的数据点的密度指标在修改后显著减少,难以成为下一个聚类中心。常数rb通常大于ra,以避免出现相聚很近的聚类中心。修正密度指标后,选定下一个聚类中心,然后再次修正所有密度指标。经过不断重复后,直到产生期望得到的聚类中心数目[11-12]。
通过聚类中心的数目来确定模糊结构的模糊规则数量和隶属度函数数量,在ANFIS模型中,每个目标聚类中心表示一个if-then规则。因此模糊规则的个数、隶属度函数个数与聚类中心的数目成正比。因此决定聚类中心数目的SCM参数值是非常关键的参数,选取时必须谨慎,为了避免主观误差。本文采用改进鱼群算法(IAFSA)[13-14]对SCM参数进行寻优。

图6 IAFSA-SCM-ANFIS组合模型结构
4 温度漂移建模
加速度计温度漂移数据具有很强的非线性与随机性,为了更加准确的建立温度漂移模型。本文将模糊推理系统、神经网络、减法聚类和改进鱼群算法融合起来构建基于IAFSA-SCM-ANFIS的加速度计温度漂移组合模型。模型结构如图6所示。
在本文中选择五种指标来评估模型性能,分别为误差最大值(ME)、误差均值(AE)、最大绝对相对误差(MAXE)、平均绝对相对误差(MARE)、均方根误差(RMSE)。三种评价指标的计算式如下:
(16)

5 模型验证与温度补偿
在本文的ANFIS结构中,输入量是温度与加速度计实际输出量,输出量为加速度计55 ℃工作时的标准输出。ANFIS输入输出结构如图7所示。

图7 ANFIS输入输出结构
人工鱼群初始参数如表1所示。
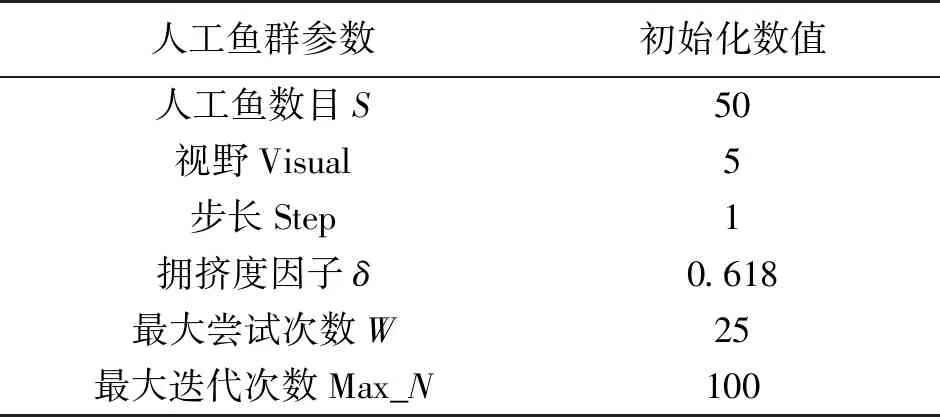
表1 人工鱼群初始参数值
初始化完成之后,从加速度计数据管理系统中导出某加速度计多位置全温域测试数据,并对其进行处理。根据加速度计各温度点各位置输出与温度信息构造样本数据[(T,N),Nc],并将其分为训练集与测试集。
5.2 模型适用性验证
通过IAFSA-SCM-ANFIS组合模型对样本数据进行训练,并将训练输出转化为加速度表示。待训练完成之后,进行模型测试。为进行模型性能比较,本文同时采ANFIS、FIS、ANN对同一样本进行训练,得到如图8所示的各模型输出残差。

图8 模型输出残差
由于从图8中不能精确的分析各建模方法性能,因此对各模型的输出进行模型评价指标计算,得到表2所示的模型误差分析结果。

表2 模型评价指标计算结果
综合图8与表2分析可知本文提出的方法建模的系统残差以及残差变化范围是最小的,而且各项评价指标相比于单一模型都大幅减小。在图10与表2中,相比于ANN模型结果的残差均方根(RMSE)0.138 mg、FIS的RMSE 0.101 mg、ANFIS的RMSE为0.034 mg,在SCM对数据样本进行聚类之后,并且经过IAFSA参数寻优之后,模型输出结果残差大小以及残差变化范围都明显减少,RMSE达到了0.004 mg(4 μg),相比于单一方法建模精度提高了将近两个数量级。验证了本文方法所建立的温度漂移模型的适用性与实用性。
5.3 温度补偿
根据5.2节的训练好的模型,对同型号同批次加速度计进行温度漂移补偿,补偿结果如图9所示。

图9 加速度计温度补偿效果
从图9中可以看到,补偿前后对比之后补偿效果明显。补偿前加速度计最大漂移为7.21 mg,补偿后最大漂移为9.3 μg,经过模型补偿之后温度漂移在1 μg量级,因此补偿之后温度漂移符合实际的应用要求。由此可见本文方法建模对加速度计温度漂移具有良好的补偿效果。
6 结论
经过石英挠性加速度计温度漂移建模与补偿研究之后,可以得到以下结论:
①基于多位置全温域温度实验数据,分析验证了石英挠性加速度计零偏漂移受温度影响而变化,标度因数漂移受温度和加速度计输入加速度共同影响而变化,导致石英挠性加速度计输出温度漂移呈现非线性与复杂性。
②为进行石英挠性加速度计温度漂移补偿,设计了温度与加速度计输出映射到加速度计标准工作输出的温度漂移模型结构,建立了基于减法聚类与自适应神经模糊推理系统的加速度计温度漂移模型。该建模方法对加速度计零偏和标度因数进行整体建模与补偿,有效减小了重复建模误差,降低了参数选取与模型结构设计的主观性误差。
③经过试验与数据分析,相比于单独使用神经网络与模糊推理系统建模,本文所建组合模型精度提高了1个~2个数量级,达到了1 μgn的实际应用要求。表明本文所建立的石英挠性加速度计温度漂移模型能够很好地预测精度与补偿精度。
