基于无人机高光谱遥感技术的河流溢油监测
2019-12-24许德刚邢学文李煜婷王晨唐丹叶汇燕
许德刚 邢学文 李煜婷 王晨 唐丹 叶汇燕
1.中国石油集团安全环保技术研究院有限公司 2.石油石化污染物控制与处理国家重点实验室 3.中国石油勘探开发研究院 4.中国石油西南油气田公司天然气研究院
随着我国长输油气管线运行时间的增加,因腐蚀、自然灾害和第三方破坏等因素导致石油管线在河流穿越处发生穿孔、破裂事件时有发生,进入河流的溢油油品对河流及其沿线造成大范围环境污染,尤其是溢油随着河水流向更远水域,会造成河流生态灾害。
溢油事故突发性强,第一时间了解灾害现状及发展趋势是所有应急决策的基础。而遥感卫星是按照基本固定轨道、固定时间飞行,很难快速获取溢油事故现场影像,无法为决策部门提供实时信息。无人机遥感是无人驾驶飞机与遥感技术的结合,综合利用先进的无人驾驶飞行技术、遥控技术和遥感应用等技术,快速获取国土资源与环境等空间遥感信息的应用技术。作为一种低空遥感技术,无人机遥感具有低成本、高安全性、高机动性和高分辨率等特点,在环境保护领域具有优势,是未来环境监测的方向[1]。
无人机遥感溢油信息监测的关键是确定油膜在电磁波谱段的响应特征。目前,国外采用较多的方法是通过航空照相的方式获得水面油膜颜色,根据波恩协议油膜颜色与厚度的对应关系表获得油膜厚度,结合监测获取的面积估算溢油量[2-3]。此外,Jan Svejkovsky等[4-5]利用多光谱传感器开展了油膜检测和厚度模型研究,Magnus Wettle等[6]研究了hymap和quickbird传感器对油膜厚度的敏感性。国内近年来也开展了大量油膜厚度的遥感光谱特征分析和反演建模研究,赵冬至等[7]应用安徽光机所生产的VF921-B地物光谱仪对辽河原油、轻柴油和润滑油进行了光谱测量和分析;刘旭拢等[8]开展了水面浮油光谱测量及光谱特征分析;臧影[9]开展了高光谱溢油图像波段选择在油膜厚度估算中的应用;兰国新[10]开展了海上溢油遥感光谱信息挖掘与应用研究;肖剑伟等[11]开展了基于生物光学模型的水面薄油膜厚度的高光谱反演实验研究;孙鹏等[12]应用AvaSpec光谱仪开展了高光谱油膜厚度估计模型分析,利用曲线拟合、神经网络和基于SVD的迭代方法构造响应函数,建立了多个基于高光谱指标的厚度模型;刘丙新[13]开展了海上不同油膜厚度高光谱遥感波段敏感性研究。以上研究大多是基于实验室环境开展的油膜厚度与光谱指标的相关性研究,在真实溢油环境下则不适用。
本研究选择六旋翼无人机为搭载平台,高光谱成像光谱仪(400~1000 nm)为传感器,采集河流环境下不同原油油膜厚度的高光谱影像,进而开展油膜特征响应光谱段分析、油膜厚度估算建模,以期实现无人机高光谱遥感在河流溢油监测中的定量应用。
1 实验部分
1.1 实验材料及数据采集设备
实验材料包括用于溢油油膜模拟的新疆原油(140 mL)、用于定量原油的注射器以及用于圈住水面油膜的圆形泳圈(内径45 cm,泳圈为硬塑料材质,对原油基本无吸附);遥感数据采集设备包括DJI大疆M600 Pro无人机、稳定云台和Headwall Micro-Hyperspec高光谱成像光谱仪(400~1000 nm)、检测合格的10 nm间隔漫反射标准参考板,光谱仪基本参数见表1。实验区河水比较清澈、流速慢,水面平静。
1.2 水面油膜模拟及无人机数据采集
本次飞行实验的目的是获取不同原油油膜厚度的Headwall高光谱数据,具体步骤如下。
将5个圆形泳圈放置于河流中,用注射器从北向南依次注入1~5 mL原油,圈内油量依次为1 mL、2 mL、3 mL、4 mL和5 mL,待圈内油膜基本扩散,从北向南、从南向北各采集一条航线高光谱数据;之后再往5个泳圈中分别加入5 mL原油,圈内油量依次为6 mL、7 mL、8 mL、9 mL和10 mL,待油膜扩散开,同样从北向南、从南向北各采集一条航线高光谱数据;继续前面的实验方式,共获取8条航线高光谱数据,去掉无效数据,最终获取了30个不同原油厚度的高光谱数据,对应油量1~20 mL,应用体积法(h=v/πr2)估算原油厚度大致为6.29~125.82 μm。数据采集前仪器进行暗电流校正。
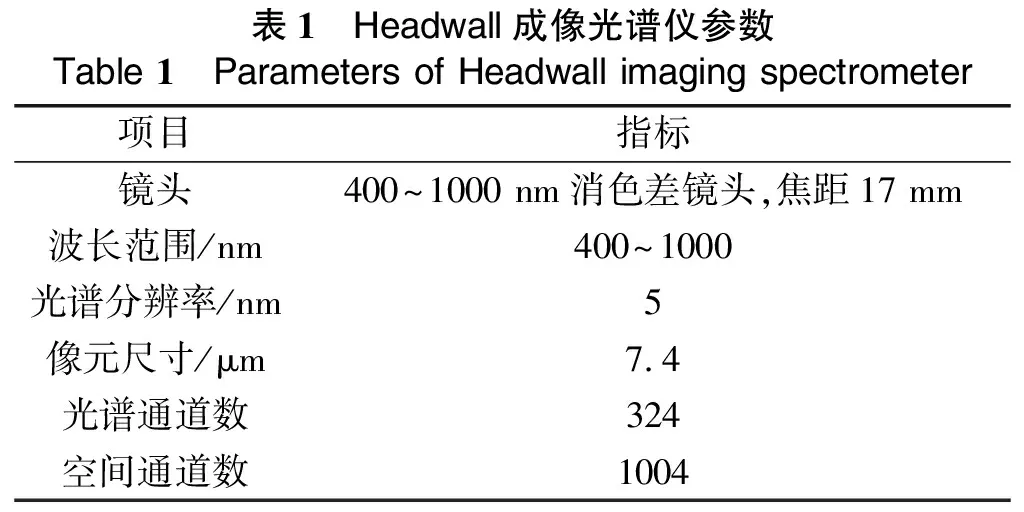
表1 Headwall成像光谱仪参数Table 1 Parameters of Headwall imaging spectrometer项目指标镜头400~1000 nm消色差镜头,焦距17 mm波长范围/nm400~1000光谱分辨率/nm5像元尺寸/μm7.4光谱通道数324空间通道数1004
为了保证泳圈范围能够获取足够的油膜像元,无人机飞行高度控制在45 m,空间分辨率2.8 cm。采集的Headwall高光谱影像及图像如图1所示,红色泳圈处为实验位置。

2 水面油膜高光谱特征指标
2.1 原油油膜水面光谱
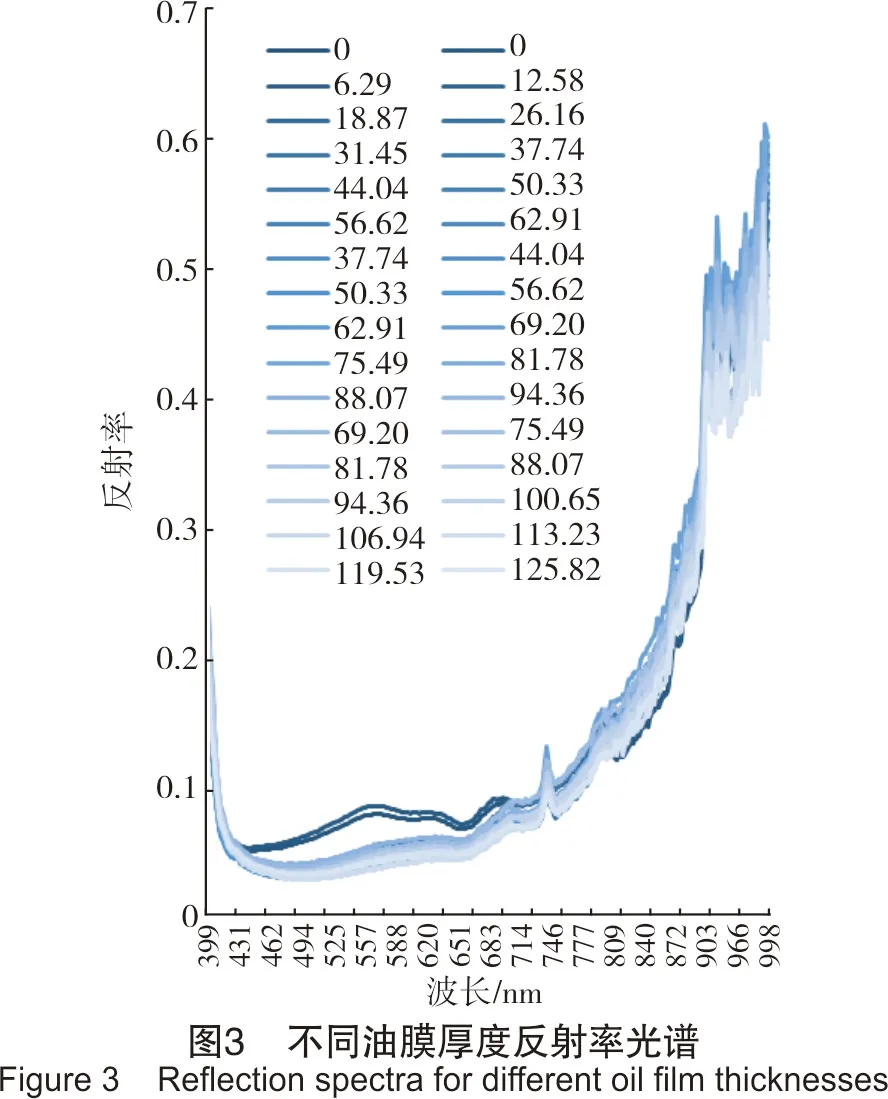
高光谱影像中,红色泳圈内部是不同厚度原油油膜,应用ENVI软件,根据现场阳光照射角度及泳圈内阴影遮挡面,在泳圈内部圈定无阴影区域(见图2),统计各谱段反射率均值,得到相应油膜厚度为400~1000 nm谱段范围的光谱曲线(见图3)。
河水光谱曲线为深蓝色,之后随着厚度的增加,蓝色色调逐渐变淡。总的来看,油膜与河水光谱比较相似,在可见光部分油膜反射率小于水体,近红外部分反射率大于水体(见图3)。与室内纯水实验谱线差别较大,这主要与河水水体浑浊、成分复杂、水体深度较浅有关。

2.2 油膜厚度光谱响应指标及拟合模型
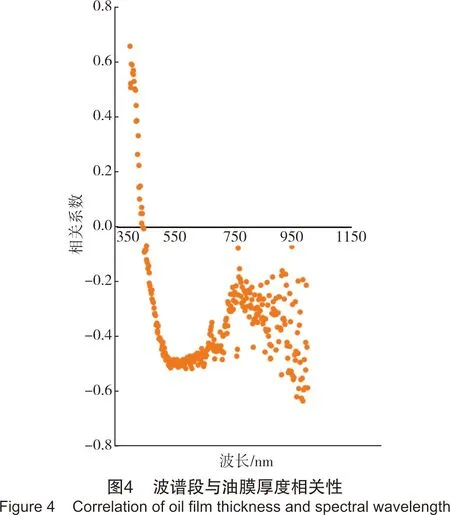
不同厚度油膜的反射率光谱是油膜在不同波谱段最直接的响应特征。从图3来看,不同厚度光谱曲线互相交织在一起,很难确定最佳的响应谱段。通过计算不同谱段反射率与油膜厚度的相关系数,发现399 nm和984 nm附近的谱段反射率与油膜厚度相关性最好(见图4)。
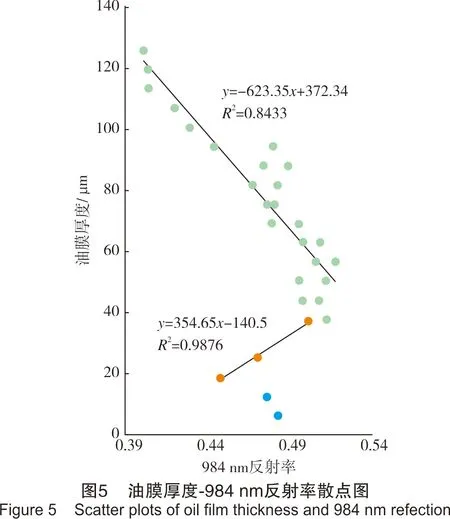
曲线拟合结果显示984 nm谱段反射率与油膜厚度建模效果较好(见图5)。其中,6.29~12.58 μm,油膜太薄,没有规律;18.87~37.74 μm,反射率随着油膜厚度增大而增大,相关系数0.987 6;44.04~125.8 μm,反射率随着油膜厚度的增大而变小,相关系数0.843 3。根据现场应急监测实际需求,结合散点图总的分布规律,选择984 nm谱段在大于44.04~125.8 μm厚度范围进行检测原油油膜模型验证。44.04 μm油膜厚度以下由于本次现场实验获取数据相对较少,且在现场较难控制进行重现,因此未继续进行模型验证。
2.3 模型检验
984 nm是对油膜厚度响应最好的波段,随机选择5组数据用于验证,剩余19组数据用来建模,模型为y=-624.84x+373.39,相关系数R2为0.825 0,模型验证结果见表2。

表2 油膜实际厚度与预测厚度对比Table 2 Comparison of actual and predicted oil film thickness实测值/μm预测值/μm绝对误差/μm相对误差/%56.61757.9641.3472.37950.32654.2293.9027.75481.78081.8980.1180.14475.49073.5511.9382.568100.653105.5474.8944.862
3 实验区水面原油油量估算
无人机飞行实验最后获取的高光谱影像记录的信息是撤掉泳圈后原油油膜完全扩散,在水面形成大面积厚度约为1 μm的蓝色甚薄油膜。由于甚薄油膜没有建立厚度模型,这里尝试应用海上溢油常用的波恩协议进行溢油量估算。
波恩协议是一个关于北海沿岸国家和欧共体处理北海溢油和其他有害物质的国际性协议,已经有30年历史,取得了卓有成效的成绩。该协议对溢油量的判断理论依据为:凡是能够造成水色差异或引起海水浑浊度变化的油污染物,均对水体的光谱反射率和发射率有影响。即从可见光至远红外至微波波段,均可获得不同程度的油污染探测效果。油膜可以在可见光内获得,随着油膜种类与厚度的不同,其光谱反射率特征将发生变化,在可见光成像图中,油膜表面颜色呈现从灰色至蓝褐色的不同颜色。根据颜色的不同判断油膜的厚度,进而估算溢油量(见表3)。
3.1 河道信息提取
河道范围是溢油油膜扩散的主要区域,外围植被、土壤和建筑物部分不仅增加了高光谱数据大小,影响数据后期处理速度,而且还会影响油膜信息提取的效果,需要将河道水体作为感兴趣区域提取出来。NDWI(Normalized Difference Water Index,归一化水指数)是基于绿波段与近红外波段的归一化比值指数,是目前比较常用的水体指数,用遥感影像的特定波段进行归一化差值处理,以凸显影像中的水体信息。其表达式为:
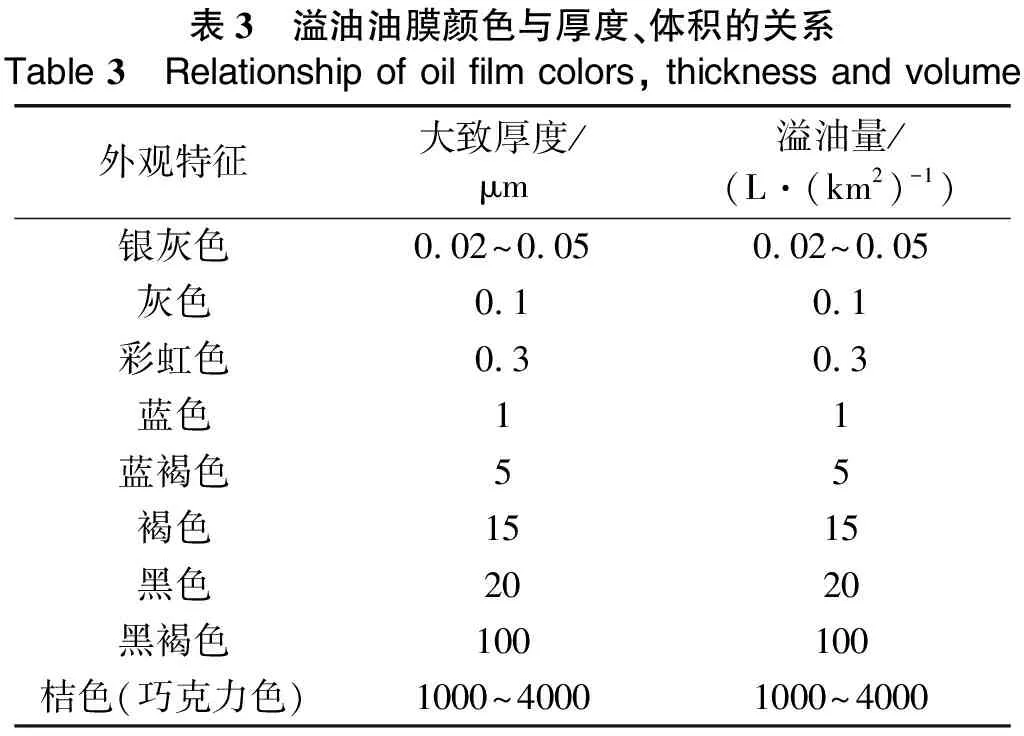
表3 溢油油膜颜色与厚度、体积的关系Table 3 Relationship of oil film colors, thickness and volume外观特征大致厚度/μm溢油量/(L·(km2)-1)银灰色0.02~0.050.02~0.05灰色0.10.1彩虹色0.30.3蓝色11蓝褐色55褐色1515黑色2020黑褐色100100桔色(巧克力色)1000~40001000~4000
(1)
式中:ρ(Green)为绿光波段反射率;ρ(NIR)为近红外波段反射率。
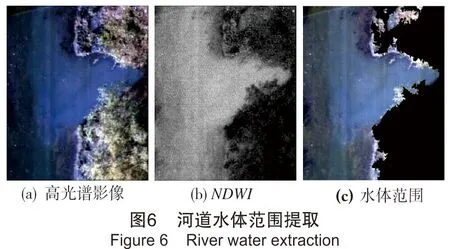
实验河道区域的高光谱影像如图6所示,淡蓝色甚薄油膜覆盖了大部分水域,沿着河道边沿也吸附了不少油膜,油膜外围水体比较清澈,水底沉积物信息特别明显。应用NDWI提取河道水体,河道范围水体大致为灰白色区域,河道外围植被、土壤为深色区域。油膜与水体的光谱曲线基本一致,不影响河道水体信息的提取。根据直方图结合真彩色影像确定阈值,对栅格影像二值化后转换为shape格式,应用ARCGIS中的eliminate命令消除细小斑块,应用dissolve命令融合相同属性的斑块,最终形成二值化矢量图。根据矢量图提取水体部分高光谱影像。
3.2 河道油膜厚度估算
由于油膜模拟实验的厚度范围为6.29~125.82 μm,建立的油膜厚度估算模型仅适用于模拟实验点,扩散后形成的甚薄油膜需要参考波恩协议来估算。
实验选择的新疆原油油量为140 mL,这一油量很难在河道中形成类似溢油事故的污染规模。图6为实验区真彩色影像,油膜从北向南漂移,前缘明显,大部分区域呈现蓝色色调,泳圈实验位置油膜大部分为蓝褐色-褐色油膜。根据波恩协议油膜颜色与油膜厚度对应关系(见表3),蓝色色调厚度大致为1 μm,蓝褐色-褐色色调为5~15 μm。
选择对油膜敏感的蓝波段(531 nm)影像,参考真彩色影像中油膜分布,应用阈值法确定油膜的分布范围,确定蓝色油膜像元数为84 925个,最小像元大小为2.8 cm,因而油量大致为66.6 mL(2.8 cm × 2.8 cm × 1.0 μm × 84925 个)。蓝褐色油膜区像元数为8195个,油量大致为32.1 mL(2.8 cm × 2.8 cm × 5.0 μm × 8195 个)至96.3 mL(2.8 cm × 2.8 cm× 15 μm × 8195 个)。最终,水面估算总油量大概为98.7~162.9 mL,实际油量140 mL位于这个区间,因而波恩协议对河流溢油甚薄油膜厚度检测同样适用。
4 结论
(1)搭载Headwall传感器的六旋翼无人机不受场地地形限制,可以快速地获取河流区域高光谱数据,其真彩色影像直观展示溢油污染范围、油膜扩散前缘,可以为溢油事故决策提供宏观支持信息。
(2)Headwall高光谱数据谱段多,包含了大量反应油膜、河道、外围地物特征的光谱信息:根据归一化水指数(NDWI)可以快速提取河道范围;根据与油膜相关性较好的蓝波段,可以快速提取河道内油膜范围;根据油膜反射率估算模型,可以获取油膜厚度信息。
(3)本次飞行实验是无人机搭载高光谱传感器进行河道溢油检测的一次探索,还存在很多需要解决的问题,比如溢油模拟中泳圈内油膜扩散问题、同一厚度南向、北向两次飞行拍摄角度变化引起的光谱差异问题,这些都需在以后的研究中解决。
