一种机载塔康终端单站定位技术
2019-12-24徐盼盼王玉林
孙 超,徐盼盼,王玉林
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
战术空中导航系统是美国1955年研制并投入装备的近程无线电导航系统,简称塔康(TACAN)。该系统由塔康地面设备(也称作塔康信标)和机载设备组成,为以地面设备为中心,半径370 km范围内的飞机(高度10 km)提供导航服务[1]。与有源定位方法相比,无源定位方法具有作用距离远、隐蔽接收、不易被对方发觉的优点,是现代一体化防空系统、机载对地、对海攻击以及对付隐身目标的远程预警系统的重要组成部分,对于提高系统在电子战环境下的生存能力和作战能力具有重要作用,同时在航海、航空、宇航、侦察、测控、救援和地球物理学研究中也扮演着重要的角色。传统无源定位方法没有充分利用信号源发射信号的隐含信息,而且对快速移动目标的高精度单站定位仍然是传统无源定位的薄弱环节[2]。
本文在深入研究塔康系统的信号特征后,充分利用塔康系统导航信息,基于询问应答脉冲对匹配原理,提出了一种针对空中目标的快速的单站定位算法,通过测量询问和应答信号到达时间差以及询问信号方位,实现对空中目标的定位。该方法可以降低系统复杂度,实现对目标的实时定位和跟踪[3]。
1 塔康工作原理
1.1 塔康定位原理
塔康系统是用极坐标方式定位的,如图1所示。图中已知O点为塔康信标,B点为装载了机载设备的飞机。在B点,以磁北N为参照方向,测量出顺时针方向的θ角和OB的距离,即定出了飞机(B)相对于信标(O)的位置。

图1 塔康原理
塔康系统是通过计算信标台信号包络的相位信息来确定方位的,该信号不仅受到15 Hz的调制,还受到 135 Hz的正弦调制,塔康系统天线方向图是九瓣心脏形,如图2所示。如果使这个正弦信号的相位与飞机在空间中的方位角相对应,那机载设备通过测量这个信号包络的相位,就可以得到飞机在空中的方位信息。

图2 旋转的心脏形方向图用于方位测量
借助基准脉冲标识N方向与15 Hz正弦包络0°相位对应,而处在E、S和W方位上的飞机,所接收到的指北基准脉冲串则分别处于15 Hz包络的90°,180°和270°相位上,处于其他方位上的飞机,指主基准脉冲所处的15 Hz正弦信号的相位也正好与其方位角对应,由此可解算出飞机的方位,如图3所示。

图3 塔康系统方位测量
辅助基准脉冲与135 Hz包络有类似的方位——相位对应关系,只是15 Hz正弦波调制信号一个周期对应空间 360°方位,而135 Hz一个周期对应于方位空间 40°。在这种体制下,机载设备先测量15 Hz正弦波的相位,初步判断飞机处于哪个40°方位角区域内,在通过测量135 Hz正弦波的相位,来确定飞机所在的准确方位[4-6]。
1.2 测距询问应答脉冲
不同模式下,测距应答和询问脉冲对的编码特征如图4所示。

图4 不同模式下测距询问和应答脉冲对示意图
X模式下,询问和应答都是编码12 μs的脉冲对;Y模式下,询问脉冲对编码36 μs,应答脉冲对编码30 μs[7-8]。
2 定位原理
2.1 对信标台的定位
信标台为了给塔康作用范围内的飞机提供导航时的方位信号,塔康信标以较高功率全向发射信号。而且在不同方位接收到的信号能够很好地反映方位角。主辅基准的到达时刻分别对应零初相的15 Hz和135 Hz的零相位点,视频脉冲幅值点对应的外层包络是15 Hz和135 Hz正弦信号的叠加,可以从接收到的信号中判断出15 Hz和135 Hz正弦波的零相位点,比较2路正弦信号同主辅基准脉冲的到达时刻之间的时延,通过2个时延可以计算出2路正弦波的初相,从而得到飞机至信标台相对于正南的方位[9]。
因此,可以不借助测向的方法,只是通过有效的处理塔康发射的方位信号,就可得出飞机相对于信标台的方位信息。如果有一架侦察机处于塔康导航的作用范围以内,那么,侦察机就可以实时地测量出相对于信标台的方向角。实际中,信标台的设置有2种情况,一种是固定的地面信标台,另一种是装备在慢速航空母舰之上的信标台。无论哪种信标台,在侦察机飞行的位置和航迹明确的情况下,都可采用单站对固定目标或慢速目标的无源定位方法来确定信标台的位置,如图5所示。
侦察机在A点和B点的三维坐标位置确知,考虑到信标台架设天线的高度一般远小于侦察机的高度,所以可以认为信标台的三维坐标高度坐标为零。因此,根据已经得到的2个方位角θ1和θ2就可以确定出信标台的位置。
上述定位思路,有别于传统的无源定位,关键是方位角的获得并不借助于测向设施,而是充分利用塔康信号本身蕴藏的信息。由此可见,对信标台的定位是切实可行的[10-12]。

图5 信标台和侦察机的相对位置关系
2.2 对空中目标的定位
在实际侦察中,侦察机、空中目标和信标台的位置关系如图6所示。通过无源定位的方式可以确定信标台的位置,而且明确侦察机的位置和运动状态。O点表示信标台,A点表示侦察机,B点表示空中目标,d1为空中目标到信标台的斜距,d2为空中目标到侦察机的距离,d3为侦察机到信标台的距离。用t1表示测距询问脉冲从空中目标到信标台的时间或是测距应答脉冲从信标台到空中目标的时间、t2表示测距询问脉冲从空中目标到达侦察机的时间,t3表示信标台发射的信号到达侦察机的时间[13]。

图6 侦察机、空中目标和信标台的相对位置关系
侦察机、空中目标、信标台之间的距离一般是200 km左右,飞机飞行高度一般是在10 km左右,在本文的定位方法中,不再考虑飞机的飞行高度,只考虑二维的地表平面定位问题,即认为空中目标位于地球表面,高度为零。
结合图6,提出空中目标的二维定位算法:
① 侦察机接收到信标台发射的信号,经过方位信号的处理得到方位角θ1;侦察机针对空中目标发射的测距询问信号测向,得到异于θ1的来波方向θ2。得到角度θ=θ1-θ2。
② 侦察机的位置确知,对方位信号的处理能够很准确地得到侦察机到信标台的方位角,因此侦察机在飞过一定的角度之后,就可以通过无源定位的方法确定信标台的位置。此时,三角形OAB的已知条件有:O(xo,yo),A(xA,yA),其中夹角θ已知。目的是确定B点的位置(xB,yB)。
③ 信标台的方位信号已经得到了充分的利用。考虑进一步利用测距询问和应答脉冲。假设B点于to时刻向O点发射测距信号,经t1,t2时间分别到达O和A。O点把测距询问脉冲延时Δt变频后形成应答信号转发。应答信号经过时间t2,t3分别达到B和A。
分析侦察机接收到的信号。利用方位信号的基准脉冲可以判定出采用X还是Y模式,从而得到固定延时Δt。对于测距脉冲,可以采用脉冲描述字的方式来存储到达的信息。然后通过测向和脉冲匹配的方式确定出针对同一空中目标的测距询问和应答脉冲对,即确保在侦察机中分析的脉冲信号是针对同一个目标的。这样就相当于关注A点的2个脉冲到达时刻:t0+t1,t0+t2+Δt+t3,其中Δt和t3已知,测距询问和应答脉冲到达各点的时刻关系如图7所示。
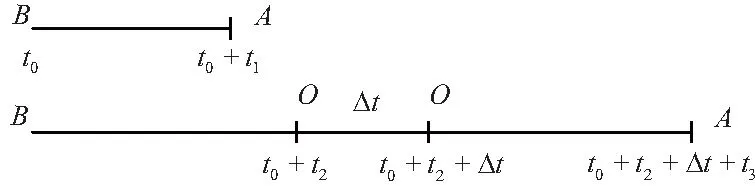
图7 测距询问应答脉冲到达时刻
记d=d1-d2=c(t1-t2),针对三角形OAB运用余弦定理。得到:
在直线AB方向已知的情况下可获得B的位置坐标[14-16]。
如果从正北顺时针到AB的夹角为θ2,A点的坐标为(xA,yA,hA),已经假设空中飞机的高度为零,即假设坐标B点坐标为(xB,yB,O),在不考虑高度的影响的条件下有:
3 定位误差分析
对信标台的定位采用测向无源定位。信标台位置误差有2个来源:一个是信标台的运动引起误差,另一个是方位角测量误差。
假设侦察机到信标台的距离为d3,侦察机以速度vp扫过30°,信标台的移动运动速度记为vb,且vb≪vp。侦察机的飞行时间段内,信标台的位置产生了变化。从正北顺时针旋转到侦察机-信标台连线的方位角,在10 dB的信噪比下,有1°的方位角测量误差。当方位角测量误差固定为1°时,侦察机距离信标台越远,定位的绝对误差就越大。
信标台定位误差分析如图8(a)所示。侦察机到信标台最大距离为塔康系统的最大作用距离370 km。在1°的测角误差下,如果信标台的真实位置在O点,受测角误差的影响,测量位置会分布在四边形ABCD内。vp=400 m/s,vb=20 m/s,10 dB的信噪比,信标台位置误差记为Δd3。
由仿真实验可知,采用脉冲匹配的方法,距离差的测量误差是1 km。假设信标台处于O点,侦察机处于A点(xA,yA),空中目标处于B点(xB,yB),如图8(b)所示,d=d1-d2=c(t1-t2)。

图8 信标台定位误差分析
由上述分析可得:

>AB误差主要由d3和θ的测量误差引起。距离差d引起的误差可以当作为1 km。对空中目标B的定位主要是由>AB的测量误差引起。
对>AB求偏导,得到测量误差与d3和θ误差的关系式如下:
在最恶劣的情况下,d3的测量误差会直接叠加在>AB的测量误差上。此时>AB的测量误差为:
4 仿真分析
由上述分析可知,定位误差主要由测向误差和距离误差引起,距离误差又可转化为时间误差。下面通过MATLAB仿真来进行说明。
4.1 不同测向误差对信标台定位的影响
仿真条件:假设侦察机2次测向的位置为Loc1(113.91°E,37.99°N),Loc2(114.09°E,38.00°N),二者相距16 km。设测向误差分别为0.2°、0.5°,通过仿真对定位误差进行说明,如图9和图10所示。由图9可知,当测向误差为0.2°时,距离双站连线中心40 km处,相对定位误差达到1%;由图10可知,当测向误差为0.5°时,距离双站连线中心40 km处,相对定位误差达到2%。由分析可知,定位误差随测向误差的增大而增大。

图9 测向误差分别为0.5°定位误差图
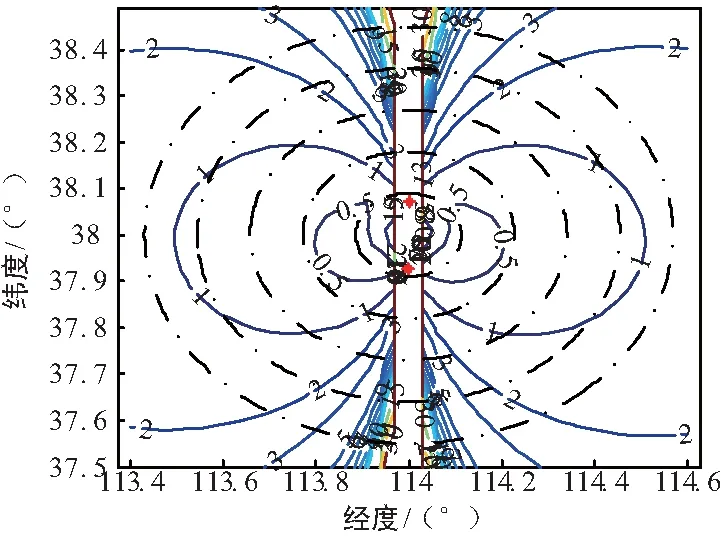
图10 测向误差分别为0.2°定位误差图
4.2 不同测时差精度和测向精度对空中目标定位的影响
仿真条件:假设某一时刻侦察机位置为Loc1(114.00°E,37.78°N),信标台定位得到位置Loc2(114.00°E,38.22°N),二者相距50 km。设测向误差分别为0.2°、0.5°,时差误差分别为20 ns、50 ns,对定位误差进行仿真说明,如图11~13所示。
由图11和图12对比可知,当测向误差为0.2°,时差误差值分别为20 ns和50 ns时,距离双站连线中心100 km处,相对定位误差分别为到2%和2.3%;由图11和图13对比可知,当时差误差为20 ns,测向误差为0.2°和0.5°时,距离双站连线中心100 km处,相对定位误差达到2%和5%。
综上可知,随着时差误差和测向的增大,定位误差均随着增加。但时差测量误差对定位结果影响相对较小,测向误差对定位结果影响较大。

图11 测向误差0.2°时差误差20 ns时定位误差曲线

图12 测向误差0.2°时差误差50 ns时定位误差曲线

图13 测向误差0.5°时差误差20 ns时定位误差曲线
5 结束语
通过理论分析,验证了单站无源定位体制的技术可行性,该体制以最小的设备量及系统复杂度实现对空域中的多个目标进行监视与跟踪,这对于在偏远山区以及离岸岛礁等复杂地理环境下部署对空监视系统具有重要意义。另外,文中考虑问题的时候,假设系统工作区域处于平面而且不考虑高度的影响,此外还忽略了多普勒频移的负面影响。因此,这些问题在今后的工作中需要进一步的研究。
