考虑地球曲率情况下测向定位系统中的最优交会角
2019-12-24马燕飞刘晓丽
白 晶,马燕飞,刘晓丽
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081; 2.中国人民解放军93558部队,河北 石家庄 050081)
0 引言

本文在文献[2-3,10]的基础上,在考虑地球曲率的情况下,研究了不同量测误差条件和最小圆概率误差(CEP)准则下被动测向交叉定位系统中的最优交会角。
1 问题描述

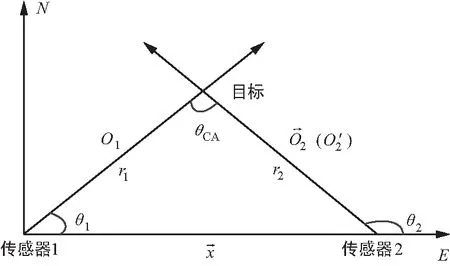
图1 NE平面内的测向交叉定位示意图
根据前面的假设和文献[13-14],得到
(1)
且

(2)
其中
(3)
为坐标变换矩阵且

(4)
其中
为地心固定坐标系到传感器1的局部NED坐标系的坐标转换矩阵。传感器i的地心固定坐标为:
(5)
其中
式中,Re为地球的长半轴,∈为地球偏心率。
从图1可得交叉定位方程
(6)
通过简单计算可得:
(7a)
和
(7b)
根据如图1,目标估计位置为:
(8a)
(8b)
利用式(8)可得:
(9)
其中
η2=cosφ1μ2/μ2,
η4=sinφ1μ2/μ2,
μ1=xNb11cosφ2+xNb12sinφ2-
xEa11cosφ2-xEa12sinφ2,
μ2=xNa12b11sinφ1+xEa11b12cosφ1-
xNa11b12sinφ1-xEa12b11cosφ1,
μ=b11cosφ1cosφ2+b12cosφ1sinφ2-
a11sinφ1cosφ2-a12sinφ1sinφ2。
那么,目标位置估计误差方差为:
(10a)
(10b)
2 最小圆概率意义下的最优交会角
一种常用的度量定位误差的指标是圆概率误差(CEP)。它是指目标落入内部的概率为50%的圆的半径。可表示为[1]:
(11)
其中
(12)
显然,最小化r0.5等价于最小化二元函数f(φ1,φ2)。式(12)两边分别对φ1和φ2求偏导并令它们等于零,可得:
(13a)
(13b)
其中
μ3=b11sinφ1cosφ2+b12sinφ1sinφ2+
a11cosφ1cosφ2+a12cosφ1sinφ2;


μ6=b11cosφ1sinφ2-b12cosφ1cosφ2-
a11sinφ1sinφ2+a12sinφ1cosφ2。
(14)
(15)
式中,jij(i,j=1,2)为函数fi(φ1,φ2)(i=1,2)对应的雅可比矩阵的元素。根据Fi(i=1,2)的符号可判断稳定点的极值性。
3 数值计算和仿真结果


表1 不同k值对应的数值计算结果

图2 最优交会角与方差比值k的关系
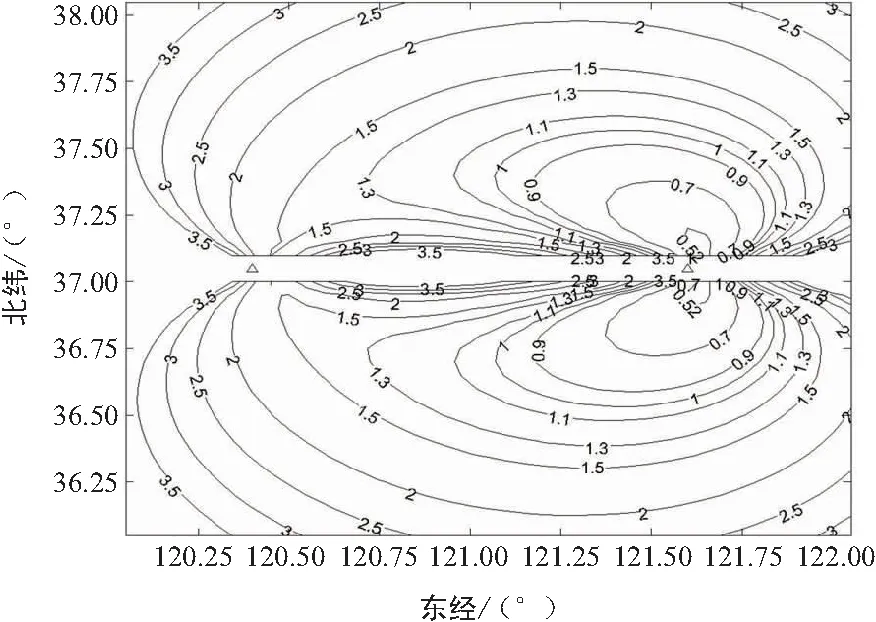
图3 圆概率误差等值线,

图4 圆概率误差等值线,
从图2~图4和表1,可以得出:
① 当k<0.5时,最优交会角近似等于90°。显然,此时CEP值达到最小值的目标位置,无限接近或位于2部传感器的基线上,且无法对目标进行有效测向交叉定位。如图3所示,此时的目标位置无限接近传感器2的位置。因此,此时可行的最优交会角不存在。
② 当k≥0.5时,存在可行的最优交会角,且其值随着方差比值k的增大而增大。对于给定的k,对应2个相同的最优交会角且CEP值达到最小值的2个目标位置对称于E轴。

4 结束语
通过理论分析和数值计算得到,考虑地球曲率时的测线交叉定位系统中的最优交会角与2部被动传感器的角度量测误差方差的比值有关。在实际工程应用中可根据被动传感器的测角误差方差之比,结合量测目标分布情况选择合理的布站方式,以得到高定位精度。文中得到的最优交会角是通过数值计算得到的,所以这里的“最优”不是严格意义下的最优,只是渐进或逼近意义下的最优。同时,为了得到具体的交会角值,前面只给出了几个典型k值对应的最优、次优交会角,这里试图给出一种解决问题的通用方法,可以扩展到任意k值对应的最优、次优交会角的求取。
