面向全过程的机载预警雷达效能评估技术研究
2019-12-23诸四海
段 蕾,诸四海
(南京电子技术研究所,江苏 南京 210039)
0 引 言
现代战争一般采用体系作战模式,具有作战范围广阔,任务环境复杂多变的特点。预警机作为作战体系中的一个中心节点和重要的武器装备,其主要使命是在复杂环境下实现对空中目标、高速导弹和海面舰船的远距离预警探测。能否充分发挥雷达的预警探测作用不仅关系到任务执行的好坏,而且有可能影响局部战争甚至全局战争的成败。
为了提升预警雷达的作战效能,需要对雷达使用过程中的各项能力进行分析和评估。一般的方法主要着眼于预警机雷达作用距离和情报质量的评判[1-2],或者针对复杂环境对雷达抗干扰能力进行分析[3],缺乏雷达使用前不同环境下的预案规划,使用后电磁干扰和情报质量的综合分析以及抽象评判机制的有机结合。本文提出一种面向全过程的机载预警雷达效能评估技术,在整体性和协同性原则框架下,采用数学和仿真建模方法定量估计雷达不同指标参数条件下的能力,并基于训练数据,采用试验研究和抽象评判相结合的方法,任务前仿真规划,任务后分析评估复杂环境下预警雷达工作情况,最后进行综合评分,使雷达系统发挥最大效能,进一步提高装备作战使用能力。
1 机载预警雷达作战效能评估体系架构
武器系统的效能指标是衡量武器系统在特定条件下完成规定任务的尺度,一般分为解析法、统计法、仿真法、多指标综合评价法等[4]。预警机作为一种复杂的武器系统,包括雷达、敌我识别、电子对抗、通信、导航和综合显示等分系统,其中雷达为主要情报源,是预警机系统的核心装备。预警机工作演练是按任务要求设计训练课题,按实战条件构建复杂战场环境,全要素配编体系力量,完成“侦察、控制、打击、评估”的作战流程。
机载预警雷达作战效能不可简单地以单一的、局部化的评估方法实现,考虑到雷达及任务、环境的复杂性,要在定量分析与定性分析相结合的离散多目标决策分析方法[5]基础上结合专家系统和模糊综合评判[6],并采用面向全过程的方法来建立评估体系架构,进而检验武器装备的综合作战效能。机载预警雷达作战效能评估体系主要分为数据采集和分析评估两部分,其架构如图1所示。

图1 机载预警雷达作战效能评估体系架构
数据采集系统主要负责记录、采集雷达训练数据和相关情报数据,作为效能评估的数据基础。分析评估系统主要负责雷达效能评估,包括数据处理、静态、动态评估和态势重演模块。数据处理模块将效能评估所需要的数据进行预处理、分类和抽象。静态评估模块属于任务前规划和评估,将雷达的任务要求、功能、特性和环境参量作为输入,定量仿真评估雷达在复杂环境下完成规定任务的潜力,包括探测威力、覆盖范围、跟踪精度、最小检测速度、抗干扰能力等。动态评估模块属于任务后评估,针对各种训练和仿真数据,评价雷达在实际使用条件下发挥出来的能力。动态评估包括雷达工作参数适应性、航迹质量、目标的定位和跟踪能力、探测精度、杂波和电磁环境影响、动态综合效能总结评估等。态势重演模块评估雷达对战场态势情报的掌握能力,通过对雷达探测情报和其他传感器融合情报的动态重演,实现对雷达探测目标总体情况的人工评判,包括情报的覆盖范围、地理分布、航路的清晰性、航迹的连续性和光滑性等。
2 机载预警雷达作战效能评估方法
机载预警雷达效能评估需要从工作预案出发,涉及工作实施到工作总结各阶段。另外,受到任务角色、使用环境、操作方法等多种因素影响,雷达综合效能存在不确定性,不能完全通过定量方法进行描述。为了尽量准确、全面地评估雷达作战效能,本文采用面向全过程的层次分析法、专家系统和模糊数学工具相结合的武器效能评价的系统工程方法。
2.1 面向全过程
面向全过程的复杂环境下雷达效能评估以训练预案为起点,通过事前方案规划、仿真,事后演练数据统计、评估和总结来实现,具体表现为静态评估、动态评估和态势重演指标。静态指标评判雷达在不同条件下的固有能力,适用于战前预案规划,使我方雷达处于最有利空域并进行最佳参数设计,便于雷达发挥最大工作效能。动态评估和态势重演指标利用训练数据评判雷达在实际使用中表现出的能力,适用于战后武器装备的评估、总结和提高。面向全过程的评估流程如图2所示。

图2 面向全过程的评估流程
2.2 层次分析
层次分析法(AHP)是一种离散多目标问题的决策方法,特别适合于具有复杂层次结构的多指标决策问题[5]。本文重点描述系统层次划分和重要性权值计算。预警雷达综合效能评估层次结构如图3所示,文中设定总指标因子集合为E,分指标因子用Es、Ed等表示,并归纳入不同的层次结构。

图3 综合效能评估层次结构
重要性权值计算是确定各评价指标对应于上一层指标的相对重要性权值,主要包括构造判断矩阵、计算权向量和一致性检验等[7]。对同一层次的各指标要素关于上一层次中某一准则的重要性进行两两比较,结合专家系统采用1~9标度法[8]构造判断矩阵A=(aij)k×k,其最大特征值λm对应的特征向量归一化处理后,得到第i层的权重向量Wi,最终得到总权重向量W。由于事物的复杂性和人员认识的多样性,判断矩阵不可能具有完全一致性,当判断矩阵一致性率CR<0.01时,判断矩阵的一致性达到满意效果[9]。
2.3 模糊综合评判
复杂环境下机载预警雷达效能评估有定性和定量两种表示方法。雷达在不同的使用环境中承担的角色不同,对指标的要求不同,指标的量纲和关系也不尽相同。为了进行作战效能模糊综合评估,需要对指标规格化,使变量无量纲,并离散为[0,1]之间的数值。
对于定性指标,由专家评判系统建立模糊评价集V={V1,V2,V3,V4,V5}[10],分别代表“优秀,良好,较好,一般、差”五级评语,并规格量化为{1,0.85,0.70,0.60,0.50}。对于定量指标,本文采用越大越优型,即
(1)
式中yi表示在第i项评价因素下的指标属性值,ymax和ymin分别表示指标所期望的理想最大值和最小值,Vi越大表明第i项因素的评价越优。评价矩阵为R=(rij)m×m,rij表示指标因素Ei被评为Vj的隶属度。机载预警雷达作战效能D可表示为式(2),式中wi表示各因素的权重向量。
(2)
3 典型要素因子评估模型介绍
3.1 探测距离评估模型
雷达作用距离方程可表示如下:
(3)
式中,Pt是雷达发射功率;Gt是发射天线增益;Gr是接收天线增益;σ是目标雷达截面积;tf是相参积累时间;λ是波长;Ft、Fr分别是发射和接收路径的方向图传播因子;k是波耳兹曼常数;Ts是系统噪声温度;Dx(n)是N个脉冲有效检测因子;L是系统损耗因子[11]。
自由空间目标检测在雷达机内热噪声背景下进行,雷达作用距离主要由发射功率、天线收发双程增益、系统损耗、相参积累时间等因素决定。实际上雷达系统不可能在理想的自由空间工作,预警机在高空巡航时雷达探测易受地杂波和电磁干扰的影响。在山区、城市等强杂波和复杂电磁环境下,雷达接收系统的噪声功率会抬高,进而降低雷达的探测能力。通过建立目标反射截面积、地物杂波和电磁干扰的不同参数模型来评估雷达目标探测能力。
目标的反射截面积与其类型、姿态角、雷达视角、雷达工作频率、极化方式等因素有关。在已知目标规定参数,例如截面积为σ0和最大距离为Rmax0,当其他条件不变时,截面积为σ的雷达目标的最大探测距离Rmax可表示如式(4)。目标的RCS越大,雷达回波越强,对目标的探测距离越远,反之则探测距离下降。当目标截面积减少50%,则雷达作用距离下降16%。不同类型目标的RCS典型值如表1所示。
(4)

表1 常见作战飞机和导弹的RCS值
(5)
其中Rm是自由空间最大作用距离,C/N是杂噪比,J/N是干噪比。杂波强度在不同的地形地貌下起伏很大,C/N也随之变化,当干扰很强时,雷达作用距离主要受到干噪比的影响。当C/N=0 dB,J/N=33 dB时,雷达作用距离下降约85%。
3.2 目标最小径向速度评估模型
机载预警雷达采用脉冲多普勒体制, 利用静止目标和运动目标的回波频率偏移差异产生的多普勒效应,在频域上滤除主杂波、提取运动目标。目标的径向速度是其速度矢量在雷达波束方向上的投影,由于预警机平台运动导致主杂波展宽,低径向速度目标落入主杂波区后无法检测,存在低速探测盲区。盲区大小主要取决于雷达载机的飞行速度、雷达波束宽度等,载机速度越大、雷达波束越宽则速度盲区越大。主杂波宽度计算公式如下:
(6)
其中Δf0为主杂波宽度;θB为天线主波束水平方向波束宽度;V为预警机飞行速度;θ0为天线主波束扫描方位角;φ0为俯仰角;λ为波长。定义雷达未落入速度盲区的最低径向速度为最小可检测速度。
目标进入预警雷达探测速度盲区情况见图4。

图4 目标出入预警机低速盲区示意图
当给定目标地速和雷达最小可检测速度后,可计算出目标速度盲区和目标穿越盲区的时间,用于预警机航线的优化设置,分析航迹中断原因,调整航迹生命周期门限,提高对预计目标的探测能力。假设目标位于300 km处,地速为300 m/s,最小可检测速度为30 m/s,则速度盲区夹角为11.48度,目标穿越低速盲区约需200 s。
3.3 抗干扰能力评估模型
机载预警雷达工作过程中,各种有意、无意的干扰信号构成了复杂的电磁环境。雷达采用相控阵体制、超低副瓣天线、高功率发射机、脉冲多普勒体制、频率捷变、旁瓣消隐、脉冲压缩、空时二维自适应处理等技术抑制干扰。常见的有源干扰类型有噪声压制式干扰和欺骗式干扰,噪声干扰又包含自卫干扰和支援干扰。本文主要采用静态和动态模型对雷达抗干扰能力进行评估。
抗干扰能力静态评估模型,重点关注雷达自卫干扰距离、支援干扰距离、干扰抑制比等方面。自卫干扰作用距离是雷达在自卫干扰条件下对目标的探测能力。在抗干扰能力评估时,可根据干扰机参数计算雷达能发现目标的自卫距离,如下式所示:
(5)
其中D0是雷达识别因子,即最小检测所需信杂比;Pj是干扰机输出功率;Gj是干扰机天线增益;Bj是干扰机输出信号总带宽;Lj是干扰信号发射路径损耗,Ls是雷达系统损耗。式(5)表明,雷达自卫距离是干扰机等效干扰功率谱密度PjGj/Bj的函数。
支援干扰作用距离是雷达受到支援式干扰时对目标的探测能力。根据雷达、目标和干扰机的相对位置不同,当目标和干扰机在雷达的同一视线上时,为主瓣支援干扰;当雷达主瓣观察目标,干扰机处在雷达副瓣视线时,为副瓣支援干扰。在作战规划中,根据支援干扰距离,合理安排预警机雷达的位置,可实现对前沿战场态势的有效探测。对于采用噪声压制式的支援干扰,当雷达受主瓣远距干扰时,在方位上的雷达探测距离可用式(6)表示:
模拟时段设定:本次模拟自废渣填埋场建成开始运营起,总共模拟7 200 d(20 a),时间步长为50 d,总共144步,模拟得出污染物浓度时空变化过程。
(6)
其中Rj为干扰机至雷达的距离。当雷达受旁瓣远距干扰时,雷达探测距离可用式(7)表示:
(7)
其中GSLJ为相对于主瓣的旁瓣增益。支援干扰作用距离与干扰等效功率谱密度的关系如图5所示,支援干扰压制比仿真估计如图6所示。
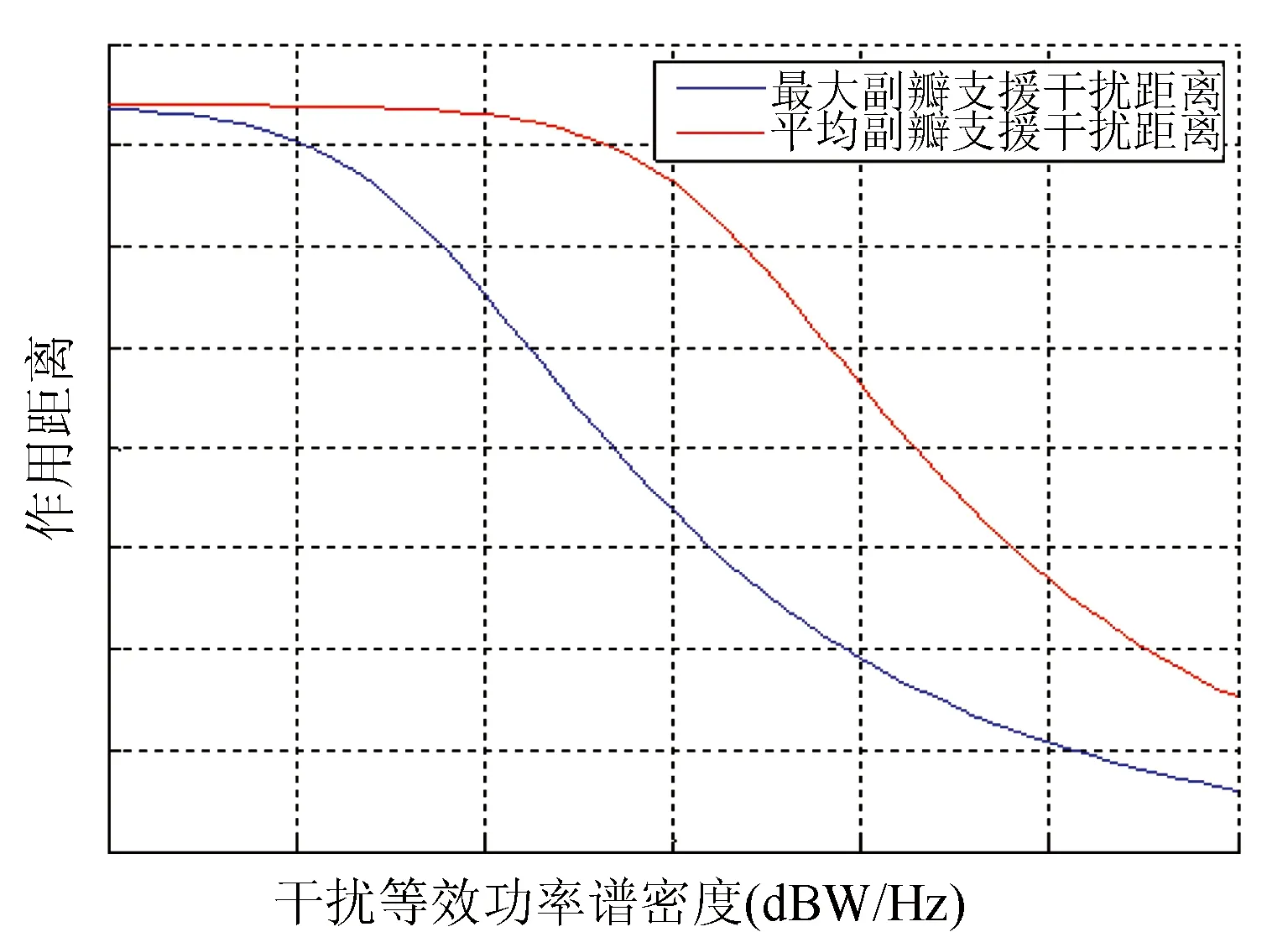
图5 支援干扰距离与干扰等效功率谱关系

图6 支援干扰压制比仿真估计
抗干扰能力动态评估模型重点关注干扰噪声谱分布、干扰源定位和预警距离等。
机载预警雷达接收目标信号的同时也接收到了自然界噪声,雷达检测目标是在热噪声背景上完成的,外界干扰叠加在热噪声背景上,会导致检测基底噪声电平的抬高,最终影响雷达对正常目标回波的检测。通过分析预警机雷达基底噪声电平随时间的变化情况,可掌握雷达所处的外界电磁环境,定量统计分析出预警雷达探测距离受干扰压制的程度。例如通过统计基底抬高和干扰尖峰与基底的关系可评估干扰主瓣及近区副瓣和远区副瓣的功率大小,如图7所示。空时二维自适应处理(STAP)可良好地抑制杂波和副瓣干扰,计算360度方位上STAP处理后干噪剩余等指标可进一步评估雷达的抗干扰能力,如图8所示。

图7 干扰噪声谱分布

图8 雷达干扰抑制示意图
雷达天线具有较强的方向性,可通过载机运动进行交叉定位,根据强干扰的波束指向来估计干扰源位置。地面雷达位置固定不动,在载机运动的时间内,地面雷达干扰源可交叉到一点。对于飞机等运动干扰源,由于载机和干扰机的位置均随时间变化,干扰线可交叉定位为一个区域,如图9所示。

图9 干扰交叉定位示意图
干扰压制比反映雷达在干扰条件下的作用距离下降程度,由于机载预警雷达俯仰波束宽,波束高度覆盖范围广,因此仅考虑360度方位范围内雷达扫描波位的干扰压制比。干扰条件下某方向雷达作用距离可表示为R(θ)。
R(θ)=RCJ(θ)/R0
(10)
其中R0为无干扰时的作用距离;RCJ(θ)为干扰方向上的作用距离。雷达干扰抑制比也可描述为雷达威力图形式,如图10所示。

图10 雷达威力示意图
3.4 航迹质量评估模型
航迹质量评估模型主要包括空情态势、空情掌握率、航迹维持率、航迹生命周期、短航迹分布、航迹精度等。空情态势主要评估雷达情报的覆盖范围、航路的清晰性、航迹的连续性等,反映雷达对整体情报掌握能力。该指标用于事后评估,可重演战场态势,评估战场兵力配置、调度和指挥是否得当。
空情掌握率反映雷达在战场环境下对分配任务的情报掌握情况,可用PO=Nob/Ntr表示。PO是在特定时间内,雷达观测目标批数Nob与真实目标批数Ntr的比值。
航迹维持率表征雷达对指定目标的探测概率,反映航迹的连续性。航迹维持率η定义为指定目标航迹正确起始至正常撤销之间的观测点数Mp与雷达观测次数Q之比。航迹维持率表示为:η=Mp/Q。
航迹生命周期表征雷达航迹的持续程度及短航迹对雷达态势的干扰程度。航迹生命周期采用分类统计评估模型,将各航迹按照跟踪次数分为若干类,如N={N1,N2,N3,N4,N5,N6},其中N为航迹总数,N1N6分别为不同的航迹跟踪次数,输出形式为表格和饼状图。短航迹径向速度分布表征航迹因最小径向速度限制而导致中断的情况,距离分布表征短航迹在距离上的统计特征,参见图11。

图11 航迹生命周期统计和短航迹分布
航迹精度表征探测目标的各项测量值与真值的偏离程度,主要输出形式为系统误差、随机误差和均方根误差。系统误差是采样过程中保持恒定或按一定规律缓慢变化的误差,随机误差是各种不确定因素或随机因素引起的误差。通过建立系统误差修正模型可提高雷达航迹精度。航迹跟踪精度评估主要包括距离、方位、速度、航向、高度和位置等要素。在航迹精度评估时要对真值数据进行野值剔除、时间插值等预处理。图12为航迹速度精度误差示意图。

图12 航迹速度精度误差示意图
4 结 语
本文从机载预警雷达仿真设计和作战应用出发,给出了复杂环境条件下机载预警雷达效能评估指标体系,重点阐述了静态和动态作战效能评估指标因子模型。本文采用面向全过程的层次分析、专家系统和模糊评判相结合的方法对雷达效能进行综合评价,对机载预警雷达系统事前规划,事后评估、
总结和提高作战效能提供有力支撑,具有良好的工程应用价值。
