电动舵机鲁棒干扰补偿控制
2019-12-19孙立伟钟宜生姜雨石
孙立伟,钟宜生,姜雨石
(1. 哈尔滨建成集团有限公司,哈尔滨,150030;2. 清华大学,北京,100084;3. 哈尔滨工业大学,哈尔滨,150001)
0 引 言
舵机是精确制导武器制导控制系统设计中的必要组成部分。在实际工作中,电动舵机部分参数会随工况变化,且受不稳定载荷的影响,导致舵机控制精度和鲁棒稳定性下降。因此,如何提高电动舵机鲁棒性受到越来越多的关注。樊泽明[1]等设计了电动舵机混合灵敏度H∞鲁棒控制器,吴春[2]等完成了基于障碍Lyapunov 函数的输出有界全局收敛鲁棒控制,两种方法有效提高了对象对参数摄动的鲁棒性,但是保守性强,结构复杂;张月玲[3]和孙章军[4]等基于滑模变结构原理分别设计了舵机滑模控制器,有效提高了舵机的动态品质,但在实际应用中存在高频抖振。周林阳[5]和林大鹏[6]等针对电动舵机设计了自抗扰控制器,有效保证了舵机的鲁棒性,但未对该方法的鲁棒稳定性进行分析与证明。杨书生[7]等针对永磁同步电机调速系统,应用信号补偿的鲁棒控制方法,该方法取得了较好的控制效果。
本文针对电动舵机,提出了一种基于鲁棒信号补偿的控制方法。将实际受控对象视为由一标称受控对象加上参数摄动,针对标称受控对象设计了一阶滤波的PID 控制算法,针对参数摄动项,设计了鲁棒干扰补偿控制器对参数摄动项引起的“等价干扰”进行精确补偿,并给出了算法鲁棒稳定性的证明过程。
1 电动舵机模型及不确定性分析
1.1 舵机模型
受控对象为带减速器的直流无刷电机。忽略粘性摩擦的影响,无刷直流电机动态方程可表示为

式中ud为电枢电压;e 为电机反电势;R 为电枢回路总电阻;id为电枢电流;L 为电枢回路总电感;Te为电磁力矩;TL为负载总力矩;GD2为折算到电机轴上的飞轮惯量;n 为电机输出转速;Ce为反电势常数;Cm为转矩常数。
定义下列常数:电枢回路的电磁时间常数,T1=L /R,电机的机电时间常数Tm=GD2R/375CeCm。
电动舵机的结构框图如图1 所示。
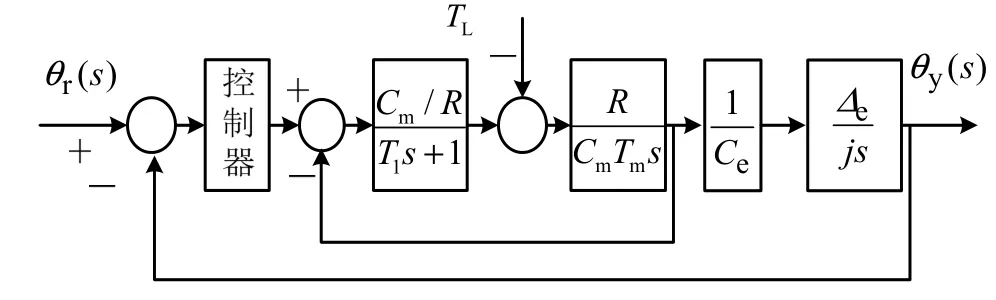
图1 电动舵机闭环控制系统结构 Fig.1 The Structure About Closed-loop Control System of Electric Actuator
1.2 不确定性分析
在实际工作中,电机参数会随着温度、转速等条件的变化而改变。空载时受控对象模型为


此外,舵机推动舵面时要承受较大铰链力矩,其变化势必引起舵机动态特性的变化。因此含有参数摄动和力矩扰动的实际受控对象可描述为

令受控对象的标称模型为

则实际受控对象可描述为

定义向量θy(t)为

a)假设1:TL及其微分均为分段连续时变且一致有界的函数,且其幅值已知;受控对象参数不确定界已知。
b)假设2:θr是已知分段连续时变且一致有界的函数。
从假设1、假设2 及式(7)可以得到:

c)假设3:式(8)中的正实数δk满足δk<k0。
2 控制器设计
考虑到传感器信号含有噪声,针对标称受控对象,设计一阶滤波PID 控制器。在此基础上设计鲁棒补偿器,抑制等价干扰对闭环系统的影响。控制系统的结构框图如图2 所示。

图2 基于信号补偿的鲁棒控制系统 Fig.2 Block Diagram of Robust Control System Based on Signal Compensation
图2 中,GK为针对标称受控对象设计的PID 控制器,有:

由此可得标称系统闭环传递函数如下:

为抑制等价干扰q,期望鲁棒补偿器输出为

由于v*中包含了输出θy(t)的微分,在实际系统中不可实现,故引入鲁棒滤波器构成鲁棒补偿器如下:

式中F(s)为鲁棒滤波器。为消除v*中的微分项,鲁棒滤波器的相对阶需大于或等于3。本文考虑如下所示的鲁棒滤波器:

式中f 和g 为鲁棒滤波器参数,为正常数。若f 和g充分大,则鲁棒滤波器带宽足够大,式(13)给定的补偿信号v 充分接近式(12)给定的期望鲁棒补偿信号,从而充分抑制等价干扰q 的影响。由式(13)和(14),有:

本文设计的舵机角度跟踪控制器为线性定常控制器,其阶次由标称控制器阶次和舵机模型相对阶确定。
对式(3)中受控对象,利用H∞方法,设计结果是保守的,利用µ综合方法,所得控制器阶次会很高。
3 鲁棒特性分析
用θym(t)表示标称闭环系统的输出,则,

定义角度跟踪误差、误差向量为

对于有界的θr,存在正实数χ 满足不等式:

从式(8)及(18)可得:

定理:若假设1~3 成立,则由式(9)及(15)构成的控制器可实现鲁棒角度跟踪控制,即对任意给定的正实数ε,存在正实数f *与g*及t*,若f≥f*,g≥g*以及f>>g 时,则
若初始条件满足Eθ(0)=0,则
证明:根据式(9)、(11)、(16)和(17)可得

式中eθ( s )为角度跟踪误差 eθ( t)的拉氏变换由式(20)可得:

式中Ai(i=1,2,…,5)是与误差初始状态有关的实数,若误差初始状态为零,则Ai(i=1,2,…,5)亦为零。
式(14)可改写为如下形式:

式中h 为任意给定的正实数。从式(18)可得:

其中
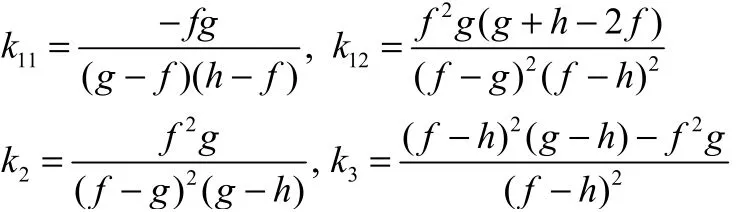
若f 与g 充分大且有f>> g>> h ,则|k11|、|k12|、|k2|和|k3|均小于一个与f、g 无关的正实数,因此下式成立:

式中γ1为与f 与g 无关的正实数。此外,

式中γ2为独立于f 与g 的正实数。因此有下式成立:

式中γ0=γ1γ2。
由式(21)及(25)可得:

相似地可以推导出:

综上,可得:存在正实数γ,υ 使下式成立:

从式(6),(9)及(13)可得

由式(19)和(29)有:


因此,

由假设2 可知,存在正实数ρ 满足如下不等式:

故有:

其中,

当g 充分大时,由式(28)和(34)有:

由式(21)、(25)、(34)及(36)可得:

从式(37)可知,对于给定的初始条件和任意给定的正实数ε,存在正实数f *与g*及t*,当f ≥ f*,g≥ g*以及f>> g时,若初始条件满足Eθ(0)=0,则证毕。
注3:由上述分析也可给出鲁棒滤波器参数整定过程:
a)取 g0> 0和 γ0≥ 1,令g = g0,γ = γ0, f= γg;
b)进行仿真或样机实验。若闭环控制特性满足要求,则转到d)步,否则,进行下一步;
c)增大g 的取值。若g 的值不是过大,转到b)步,否则,令g = g0;增大γ 的取值。若γ 的值不是过大,转到b)步,否则,进行下一步;
d)终止。
注4:当式(3)中的增益摄动∆k的模充分小时,可设γ = 1,即f = g(参考文献[8])。此时上述参数整定过程变得更为简单,只要单调地增大g 的取值即可。
4 仿真及样机实验
下面从仿真和样机实验两方面对舵机鲁棒控制效果进行分析。实验采用的舵机标称参数如表1 所示。
4.1 仿真验证
由表1 可得标称受控对象的传递函数为

首先针对标称受控对象设计标称控制器:

此控制器相角余量大于50°,标称闭环系统的带宽大于200 rad/s,满足舵机角度跟踪控制的快速性要求。
再按式(14)设计鲁棒补偿器。其模型如图3 所示。

图3 控制系统的仿真模型 Fig.3 The Simulation Model Disgram of the Control System
根据注3,通过仿真实验可以确定鲁棒滤波器的参数取值。现选取两组鲁棒滤波器参数进行对比实验,分别为f1=100,g1=20 和f2=300,g2=100。
为验证鲁棒控制器对负载力矩变化的抑制效果,进行如下仿真实验。参考角度为2°阶跃信号,0~0.4 s时间段空载运行,0.4 s 时在电机轴加0.03 N·m 的恒定负载力矩(相当于60%额定负载)。对两组鲁棒控制器及标称控制器3 种情况进行了对比仿真,结果如图4所示。
由图4 可知,0~0.4 s 舵机空载运行时,3 种情况输出曲线一致。在0.4 s 突加负载力矩时,均出现了不同程度的角度波动,其最大偏离误差和恢复时间情况见表2。
由表2 仿真结果可知,标称控制系统受到力矩干扰的影响最大,偏离的角度误差较大并且恢复时间较长。而鲁棒控制器控制的系统角度输出只是在力矩变化瞬间出现轻微抖动,并很快恢复到了期望值。对比两组滤波器参数,发现f 和g 较大的一组对力矩扰动抑制效果更好。
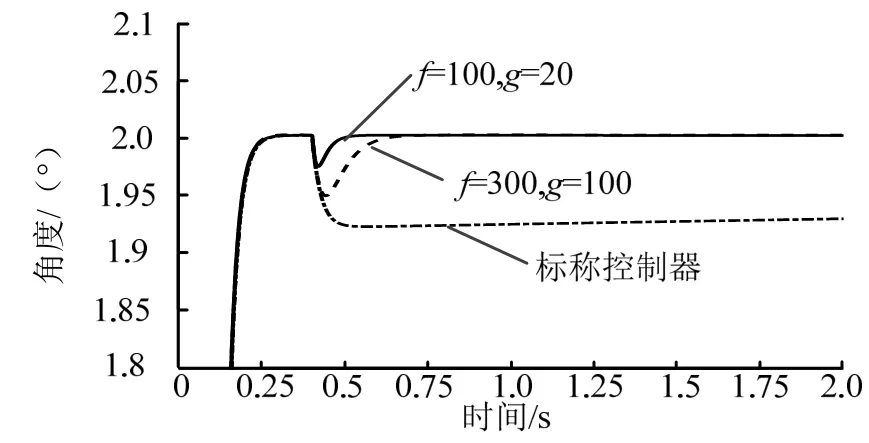
图4 3 种情况下舵机输出角度θy 对比曲线 Fig.4 Electric Actuator Output Curves θy for Three Cases

表2 仿真数据对比 Tab.2 Comparison of Simulation Datas
4.2 实验验证
采用舵机角度跟踪控制系统样机实验平台进行测试,以验证鲁棒补偿控制的实际效果,控制器参数与仿真实验相同。
4.2.1 负载力矩变化试验
舵机处于零位稳态时,分别对标称控制器和鲁棒控制器控制的系统突加额定单向恒定力矩,观察角度输出情况,测试曲线如图5 所示。
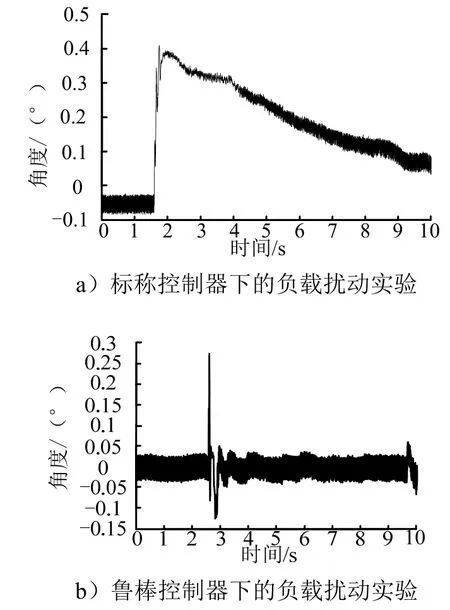
图5 舵机稳态负载扰动试验 Fig.5 Load Disturbance Tests for Steady State
由图5 可知,对于突加的力矩干扰,标称控制器控制的系统产生了0.45°的角度误差,在积分作用下需要一定的时间才能恢复到期望值。由于实际系统机械间隙,控制死区等因素其偏离角度绝对值大于仿真结果;而鲁棒控制器控制的系统在受到力矩扰动后0.3 s 即恢复到了期望值并保持稳定。表明鲁棒补偿的控制方法能够很好的抑制力矩扰动的影响。
4.2.2 恒定力矩试验
对舵机施加单向额定负载力矩,参考角度信号为频率1 Hz、幅值5°正弦信号,试验曲线如图6 所示。

图6 恒定负载力矩对比试验 Fig.6 Comparison Test of the Constant Load Torque
由图6 可知,舵机系统在标称控制器作用下其受恒定力矩方向存在约6%的输出角度误差,而带有鲁棒补偿的控制系统在相同条件下输出角度能够很好的跟踪角度指令信号。
4.2.3 高低温环境测试
在特定场合,要求舵机产品适应-45~60 ℃的环境温度。舵机机械阻尼及模型参数等会随温度变化而改变,用一组PID 参数控制难以保证全温度范围内产品性能均满足指标要求。下面在-45 ℃、60 ℃边界温度条件下进行舵机加载性能测试,指令为幅值2°的方波信号。实验曲线如图7 所示。
由图7 可知,对于标称控制器,低温状态下舵机在1.8 ~2°阶段上升缓慢,大约0.15°角度误差持续0.2 s;高温状态下舵机动态响应加快并出现了8%左右的超调,很难适应全部温度条件。增加鲁棒补偿后,有效抑制了由环境温度变化引起的系统参数摄动及模型不确定性对系统动静态性能的影响。
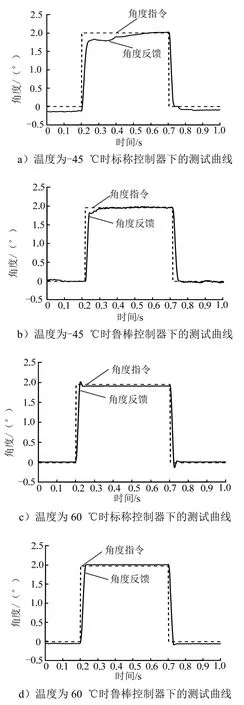
图7 不同温度下的对比试验 Fig.7 Contrast Test for Different Temperatures
5 结束语
电动舵机的复杂工作环境使常规PID 控制方法对于参数不确定性及外部扰动产生的影响难以很好抑制。本文采用基于信号补偿的鲁棒控制方法,将不确定性视为等价干扰,在标称控制输入的基础上叠加一个鲁棒补偿信号,抑制了等价干扰,同时实现鲁棒稳定性和鲁棒跟踪。实验和仿真表明了该方法的有效性。