基于BP神经网络PID控制在船舶阀门遥控系统中的应用
2019-12-13陈瑜
陈瑜
摘要:船舶阀门遥控系统是一个非线性、时变的控制系统。常规的PID控制由于局限性,不能较好地控制阀门开度,于是提出了BP神经网絡PID控制方法来控制船舶阀门开度,增强阀门遥控系统的性能。本文在介绍了常规PID控制的基础上,通过对其重要参数采用神经网络PID调控,可以使系统获得更好的调节效果。
关键词:船舶阀门遥控系统;BP神经网络;常规PID控制
中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2019)09-0009-01
0 引言
在现代船舶工业中,控制船体平衡是一个重要课题。船只在装卸货物时肯定会出现载荷不平衡的状态,此时必须通过调节液舱或压载舱的液体来达到船体平衡。传统的PID控制器构成的船舶阀门遥控系统不能很好地控制船舶各液舱及压载舱的平衡。本文将各液舱及压载舱压力、液位、温度等信号引入到控制系统中,通过BP神经网络决策,使船舶液舱或压载舱在突然产生变化时,预先调节阀门开度,同时把流量信号引入到控制系统。大大地降低了各液舱或压载舱液位的超调量,优化了控制系统的调节能力[1]。
1 BP神经网络PID控制在船舶阀门遥控系统中的应用
1.1 BP神经网络
作为目前各领域应用最广泛的神经网络之一,BP(Back Propagation)神经网络拥有其独特的学习能力。它通过逆向传播和前反馈训练,存储并学习大批次的输入、输出模式关系。
1.2 BP神经网络的船舶阀门PID控制器
BP神经网络的船舶阀门PID控制器主要由两种控制器组成,一种是常规的PID控制器,另一种是神经网络控制器NN。传统PID控制器对船舶液舱、压载舱采样控制,三个参数、、根据船体平衡度状态变化在线整定。神经网络控制器包含NNI网络识别器和NNC网络控制器。它根据阀门遥控系统的运行参数变化状态不断学习,微调系数、从而整定PID的三个重要参数,达到控制性能的最优化[2]。
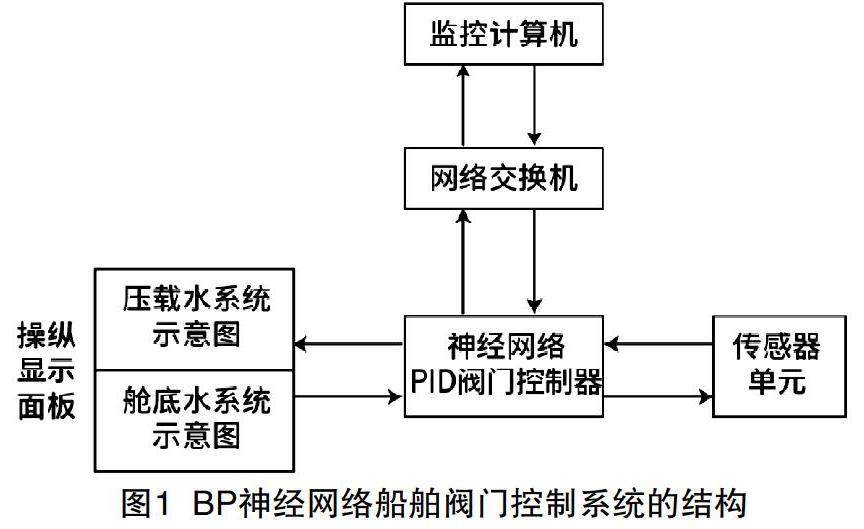
1.3 基于BP神经网络的船舶阀门控制系统的结构组成
基于BP神经网络PID控制的船舶阀门遥控系统如图1所示分三层结构:传感器单元、神经网络PID阀门控制器、显示操作单元。各个单元相互协作,先通过传感器单元接受各类信号,后经神经PID控制器运算,输出控制继电器远程控制阀门状态。并通过网络在监控计算机和操纵显示面板上显示出相关所有状态参数。
1.3.1 传感器单元
传感器单元检测各个液舱或者压载舱的状态信号,包括液位、温度、压力和船舶吃水状态等。传感器单元先将它们统一转换为4到20mA电流信号,然后送入神经PID控制器,作为控制器的输入信号。
1.3.2 神经网络PID阀门控制器
控制器获取各类传感器信号,诸如阀门、泵的状态信号和压载舱或液舱液位、温度、压力信号等。通过神经PID运算,输出控制继电器远程控制阀门状态。神经PID控制器一方面通过网络交换机与监控计算机建立通信,将接收到的信息发送给监控计算机。另一方面,通过神经网络神经元,向操纵显示面板发送信号,点亮压载水或舱底水示意图的相关指示灯,并且反映出阀门和泵的实时状态。
1.3.3 显示操作单元
同时,通过网络向监控计算机以及操纵显示面板传送各阀门的关闭、阀门开度以及泵运行指示灯信号。
1.4 神经网络PID阀门控制器硬件组成
神经网络PID阀门控制器硬件主要由A/D转换芯片、神经元芯片、D/A转换芯片组成。传感器单元采集的各液舱液位、压力、温度、流量信号时模拟信号,需要转换成数字信号后才能由神经网络芯片TMPN3150进行处理。
1.4.1 A/D转换芯片
AD7888是一种多通道高精度A/D转换器。它通常在单电源状态下工作,效率高且低耗能。它包含8个模拟量输入通道。每个模拟量输入通道可单独工作[3]。
1.4.2 神经元芯片TMPN3150
TMPN3150含有3个高效CPU。1号CPU是访问控制处理器,它驱动硬件并且执行神经网络算法。2号CPU是网络处理器,它处理网络变量、控制网络通讯端口,负责发送接受数据包。3号CPU是执行处理器,它执行用户创建的代码应用程序。
1.4.3 D/A转换芯片
TLV5616是一种数字模拟转换器。它拥有4条独立的串行接口,能够将各个串行口无缝连接。它的数字量电源及模拟量电源分别独立供给,电源电压范围在2.7V至5V之间。
1.5 基于BP神经网络的PID船舶阀门控制系统软件组成
系统软件主要包括初始化子程序、数据收集子程序、神经网络自适应控制子程序、参数发送和显示子程序。软件功能为先进入初始化子程序,然后实时采集各液舱和压载舱温度、压力、液位等信号。在船舶载荷变化产生舱位不平衡工况时,根据神经网络自适应控制算法,通过控制阀门开闭及阀门开度进行系统控制,最终实现各舱位平衡。
2 结语
本文提出了一种基于BP神经网络PID控制的船舶阀门遥控系统。在船舶载荷突然产生变化、液舱或压载舱出现不平衡时,基于BP神经网络PID控制的船舶阀门遥控系统比传统控制系统具有更好的控制效果,在更短的时间内平衡船体,且比传统控制方式超调量更小。控制系统硬件、软件结构简单,比较容易实现,应用前景较为广阔。
参考文献
[1] 靳占光.多功能船舶阀门系统微机系统控制方案[J].海洋技术,2014,23(03):130-133.
[2] 舒怀林.PID神经网络及其控制系[M].北京:国防工业出版社,2006.
[3] 阎石.数字电子技术基础[M].北京:高等教育出版社,2003.
Abstract:The ship valve remote control system is a nonlinear and time-varying control system. Due to the limitation of conventional PID control, the valve opening cannot be well controlled, so the BP neural network PID control method is proposed to control the valve opening of the ship and enhance the performance of the remote control system of the valve.In this paper, based on the conventional PID control, through the neural network PID control of its important parameters, the system can obtain better regulation effect.
Key words:ship valve remote control system; BP neural network; traditional PID controller
