卫星天线捷联式稳定平台构建分析
2019-12-11
(南京熊猫汉达科技有限公司,南京 210000)
1 引言
和传统天线平台式稳定系统相比,捷联式天线根据光纤陀螺角速率进行积分对各轴向做反作用力,消除扰动,保持天线姿态的稳定。在此基础上,配合水平传感器、北斗/GPS、信标跟踪等辅助措施加强天线稳定平台的可靠性。在实际应用场景中,若天线位于遮挡过程中,可以利用卫星信标信号快速实现稳定平台的切换,在恢复遮挡过程中,仍可以利用卫星信标实现捕获跟踪,克服陀螺自身漂移的特性。
2 天线稳定三轴结构设计
天线结构的合理设计可以使天线有很好的的支撑和定向作用。不同用途的天线有着不同的结构形式和相应的稳定跟踪方式。为了使天线能够有效隔离俯仰、横滚以及轴向角运动的影响,设计了三轴结构的天线的结构平台。也即在方位-俯仰两轴天线结构的俯仰轴的几何中心增加了横滚轴。该三轴经数字伺服信号控制下能够将来方位、俯仰、横滚方向的干扰有效地隔离,保证天线对星指向相对稳定。
3 三轴稳定平台抗扰动分析
在方位-俯仰-横滚三轴型天线结构的基础上,构建天线稳定平台,有效隔离载体的角运动,能够产生逆向转矩抵消载体运动产生的干扰力矩,使被稳定结构不产生相对惯性空间运动。
3.1 三轴稳定平台原理
图1为三轴稳定平台等效示意图。根据三轴惯性空间运动的方位、俯仰、横滚轴的角速度选取速率测量陀螺,按所对应转轴坐标系正交安装。三个转矩电机Ma、Mp、Mr则分别与方位、俯仰、横滚三个环架转轴直联或通过减速装置连接,输出解耦的比例控制转矩,以抵消因载体运动引起的环架之间的相互作用力。
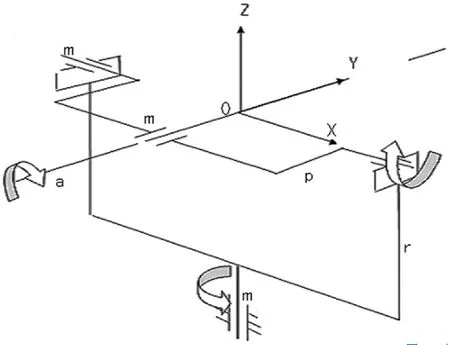
图1 三轴稳定平台等效图
根据图1,以原点分别建立载体、俯仰轴、方位轴、平台、电机坐标系:
载体坐标系,外环即俯仰轴的支撑结构坐标系、内环即俯仰环坐标系,平台负载坐标系、电机坐标系。
三轴平台受到载体姿态变化引起的扰动时,产生在各轴系之间相互作用力的传递,如图2所示。其中,图2a为b系绕Yb轴正向转动θr角度到r系;图2b为r系绕Xr轴逆向转动θp角度到pi系;图2c为pi系绕Zp轴逆向转动角度θa到p系。
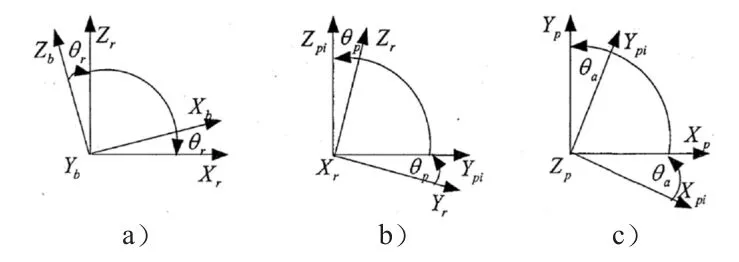
图2 坐标系变换关系图
3.2 三轴稳定平台扰动传递过程分析
装载在载体上的三轴平台,会因载体姿态变化产生三轴系间相对惯性空间运动,要抵消这样的相对惯性空间运动,使三轴能够产生相对于上述作用力的逆向运动就可有效隔离载体角位移对其平台的干扰,实现三轴平台的相对稳定。平台负载(天线)相对位置变化是由三轴系间的刚性约束和摩擦约束传递的,在运动状态下保持天线稳定,就得设法消除刚性约束和摩擦约束在轴系间的传递。

横滚环、俯仰环、方位环三轴系间由摩擦约束造成绝对运动角速度向量为:设由载体运动使横滚环r、俯仰环p、方位环a的绝对运动角速度分别为ωir、ωip、ωia,其中角速度ωir在r系上的分量为,角速度ωip在p系上的分量为。
载体角速度运动向r环的传递。平台的r环轴可通过摩擦约束隔离载体角速度分量,但该分量不能通过刚性约束的方式传递到r环。而载体角速度的另外两个分量、、则以刚性约束方式传递向外环传递,根据图2a有如下:

角速度运动向p环的传递。通过p环以摩擦约束方式隔离r环角速度的分量。角速度分量、通过刚性约束传递到内环,图2b可得如下关系:

a环对于对于来自p环角速度运动的传递。a环轴则通过摩擦约束隔离p环角速度的分量。的另外两个分量、可通过刚性约束传递到内环,根据图2c可得如下关系:

将式(1)~(3)综合整理,得到从载体到天线平台的刚性约束传递矩阵为:


电机轴转动角速度到天线平台的传递。力矩电机产生的环架角速度是以摩擦约束方式向天线平台的传递。设由力矩电机产生的r环、p环、a转轴转动的角速度向量为,由环架转动形成的摩擦约束途径向天线的传递矩阵为,传递到天线形成的天线角度在p系上的分量为,则有:


通过对三轴稳定平台各轴系的扰动传递和传递方式可以看出,天线方位经轴系间扰动传递的转矩可以由转台电机的转矩进行位置补偿,因载体侧倾引起天线水平方向的扰动可由横滚轴驱动电机转矩和方位轴驱动电机转矩来实现隔离。即依据侧倾角的实际变化量来分配各转矩的协调关系。载体侧倾角的大小决定了天线平台与横滚轴和方位轴两轴系解耦其协调动作的幅度。
载体运动中对天线平台的扰动引起各轴系间方向和速度的变化可由光纤陀螺进行测量,控制系根据陀螺数值经数字信号处理系统(DSP)进行积分运算,输出针对各轴进行控制的转矩的大小,消除载体运动对天线平台的扰动。
3.3 捷联稳定平台设计方案选型
由于捷联式系统是由数字化传感器和数字伺服等数字硬件搭建的稳定平台,按照不同的应用领域捷联式稳定系统在硬件配置上会有不同的选择方案:
第一种是以测量磁场变化作为感应载体姿态变化,以数字罗盘与北斗/GPS相结合的方案。北斗/GPS提供载体地理坐标信息完成对星,数字罗盘测姿数据为伺服单元提供位置补偿信息保持平台稳定。由于数字罗盘存在固有的迟滞性和零点温漂、以及受地理环境、载体铁磁性质的材料的影响,不利在复杂环境下使用。
第二种是以测量角位移和角速度作为载体测姿的惯性导航元件(IMU)与北斗/GPS结合的方案。测出载体位置信息,再根据测量出反应载体变化的的三轴的角位移、加速度值,经DSP伺服系统解析运算输出信号对载体姿态变化实时修正维持平台稳定。
第三种高稳定度捷联式系统,采用动力调谐陀螺(Dynamic tuned gyroscope)、激光陀螺、高精度的测量载体姿态的传感器独立或组合使用,其瞬态响应、控制精度、零点漂移等性能指标都大大优于前两种,但因其成本高目前只用于飞行器导航、战术导弹的制导系统。
上述三种方案,第二种方案以性价比、应用层面、卫星通信系统的日趋小型化、机动灵活性等诸因素考量较为合适,进行捷联式系统稳定性的架构。
4 结束语
基于天线载体稳定平台构建,结合捷联式辅助姿态融合修正,可以提高天线载体的瞬态响应,有效隔离因信标跟踪滞后带来的指向误差,提高了天线的跟踪精度。随着MEMS惯导的应用与发展,其低成本优势,捷联式天线稳定系统平台模式将更好地实现其工程价值。
