基于区间相离度的异步航迹抗差关联算法
2019-12-10杨卫国
周 威,衣 晓,杨卫国
(海军航空大学,山东 烟台 264001)
在雷达组网系统中,由于雷达开机的异步以及雷达采样周期不同,导致航迹是异步的;同时系统误差也会对算法性能造成一定程度的影响。因此,研究在雷达异步,带有系统误差的情况下,如何进行精准的航迹关联是有必要的[1-4]。
目前,异步航迹关联的一般算法是需要将异步航迹经过时域配准到同一时刻,再采用经典的航迹关联算法进行关联。文献[5]提出了基于最小二乘法的异步航迹关联算法;文献[6]提出了通过构造伪点迹来实现航迹同步化的算法;文献[7]提出了一种改进蚁群算法。上述的算法均是通过时域配准得到估计值,而由于估计而带来的误差在这一过程中是无法估量的。文献[8]提出了一种基于OSPA距离的算法,但只能解决航迹生命周期不同情况时的异步航迹关联问题。文献[9]提出了一种无须配准的基于区实序列的异步航迹关联算法,但需要预知雷达采样频率比。文献[10-11]提出了将系统误差对航迹的影响看成是航迹的旋转和平移,利用傅里叶变换理论对航迹进行补偿,进而实现航迹关联。文献[12]将系统误差对航迹的影响用灰区域来描述,并提出了一种基于区间相离度的航迹灰关联算法。
针对雷达采样异步、系统误差的影响等问题,本文以灰关联理论为基础,综合分析目标机动的性能,提出了一种无须时域配准,抗系统误差的航迹灰关联算法。
1 模型建立
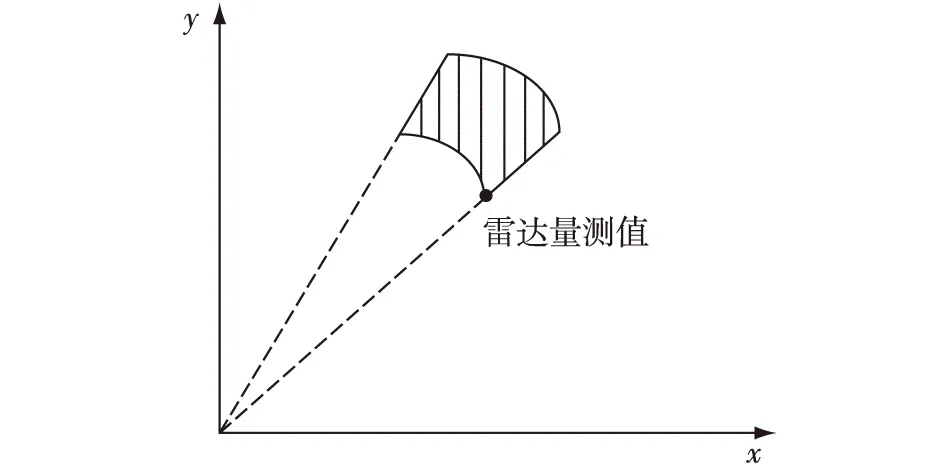
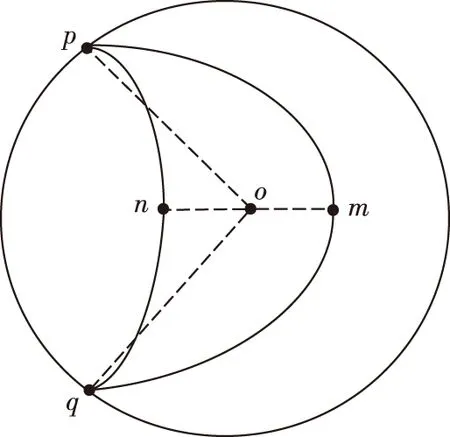
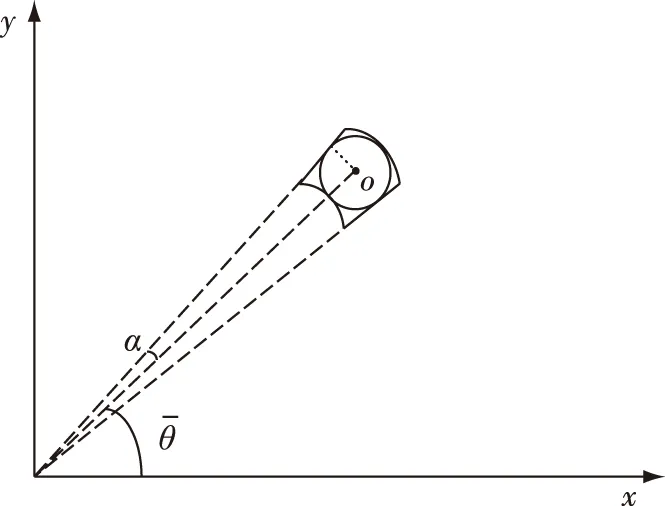
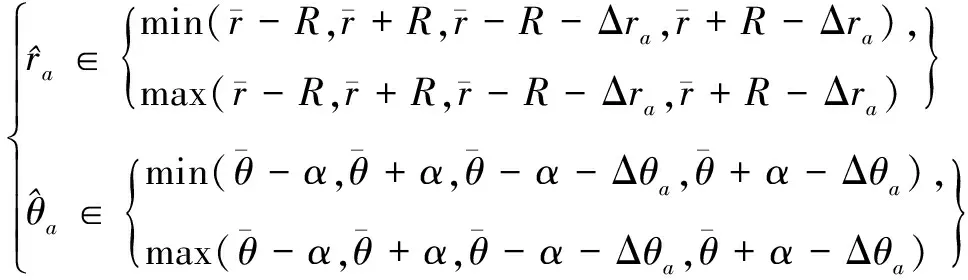
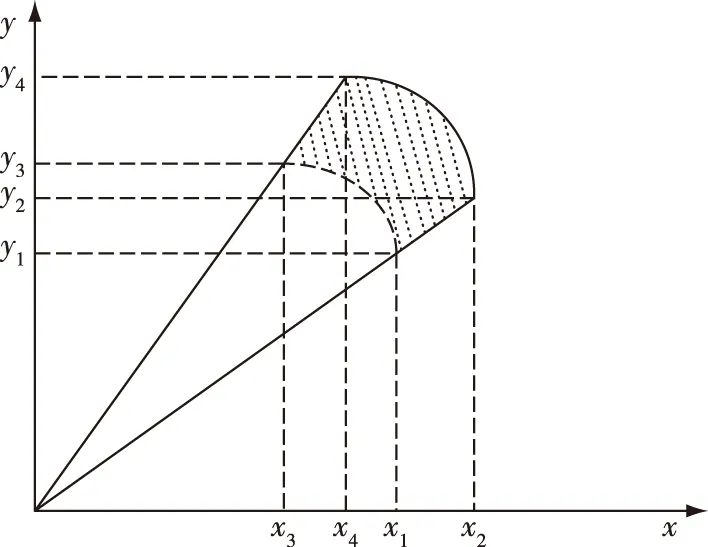
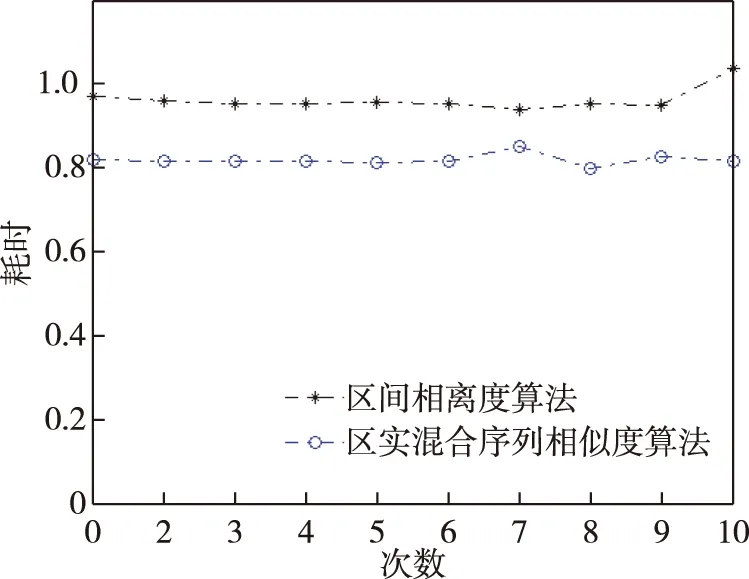
假设异地配置的两部2D雷达A、B同时对目标区域进行监测。以雷达A为原点建立笛卡尔坐标系,雷达B的坐标为(xs,0)。雷达A的探测周期为Ta,雷达B的探测周期为Tb,且Ta 雷达A探测目标区域形成的航迹集合为Γb(k),即 (1) 雷达B的目标航迹集合为Γb(h), (2) 图1 航迹异步示意图 以探测周期较大的雷达B的量测值为基准,推算出雷达A的目标航迹量测值在雷达B探测时刻的目标位置区域。目标在运动时,受到机动性能的限制,可以推断目标位置下一时刻可能存在的区域。 飞机转弯过程较为复杂,本文简化考虑飞机转弯过程,大体上飞机转弯的飞行状态可分为三种,依次为:进入状态、匀速盘旋状态、改出状态。 分析飞机机动时受力情况,如图2所示。 图2 飞机受力示意图 图2中,L是飞机飞行的升力,W是飞机本身的重力,γ是飞机升力与地面垂直线的夹角。 飞机处于匀速盘旋时,此时飞机的受力处于平衡状态,如式(3)所示: (3) 式中,P是飞机推力,D是飞机阻力,v是目标运动速度,r是目标转弯半径,m是目标重量。 飞机油门产生的推力与阻力、飞机本身重力与拉力在垂直线上的分力相互抵消,仅剩拉力水平方向的分力为飞机转弯提供向心力。此时飞机做匀速圆周运动。 飞机处于转弯进入状态时,飞机增大油门,速度增大,同时飞行坡度不断增大,随之升力与垂直线的角度不断增大,提供飞机转弯的向心力不断增大。此时飞机飞行速度不断变大,飞机转弯半径不断减小。 飞机处于转弯改出状态时,飞机减小油门,速度减小,同时飞行坡度不断减小,随之升力与垂直线的角度不断减小,飞机转弯的向心力不断减。此时飞机飞行速度不断减小,飞机转弯半径不断增大。 在T时刻,雷达B探测到目标,而雷达A探测的时刻距T最近为T-Δt时刻。根据目标本身性能,推断T时刻雷达A探测目标位置区域。在这Δt时间内,目标运动可能处于匀速飞行、加速、减速、转弯等情况。如图3所示。 图3 目标位置区域示意图 图3中,m为飞机以最大加速度直线运动到达的点,n为飞机以最大减速度直线运动到达的点;而p、q为飞机已经处于稳定状态,以最小转弯半径转弯所能到达的点。 边界pmq上的点是飞机处于进入状态,马上进入平稳盘旋状态所到达的位置,处于进入状态时间越长,越靠近m点;边界pnq上的点是飞机脱离平稳盘旋状态,已经处于改出状态所到达的位置,处于改出状态时间越长,越靠近n点。 飞机处于进入状态时,飞机的速度不断增大,并且提供转弯的升力分支还比较小,因此飞行路线必定在飞机直线行驶路线的附近,如图3中线fs。 当飞机处于改出状态时,飞机的速度减小。因此其运动轨迹与处于稳定转弯状态下的运动轨迹相比,必定在最小转弯半径路径以内,如图3中线fh。 (4) (5) 根据目标机动性能以及雷达A的航迹集合Γa(k)与雷达B的航迹集合Γb(h),推算出同一时刻雷达A探测目标的灰区域集合Γa(h),即 (6) 雷达在探测目标时,存在系统误差以及随机误差等多种误差。实际应用中系统误差的范围是可知的,可以通过量测值和系统误差反推出目标真实位置存在的区域。 假设雷达B的测距和测角系统误差范围为(0,Δrb),(0,Δθb),量测值距离和角度分别为rb、θb。 (7) 由此可以反推出雷达B量测值的目标真实位置灰区域,即 (8) 目标真实位置灰区域如图4所示。 图4 目标真实位置灰区域示意图 (9) (10) (11) 覆盖圆灰区域如图5所示。 图5 目标位置区域覆盖圆示意图 根据覆盖圆灰区域相对雷达A的位置以及自身的形状,将其放大表示为扇形区域: (12) (13) (14) (15) 放大扇形灰区域如图6所示。 图6 扇形灰区域示意图 假设雷达A的测距、测角系统误差范围为(0,Δra)、(0,Δθa)。根据目标位置灰区域和雷达系统误差范围,可以推算出目标真实位置灰区域。 (16) 二度放大灰区域如图7所示。 图7 二度放大灰区域示意图 图7中,阴影区域表示目标真实位置灰区域,T时刻目标的真实位置必定在该灰区域内。 航迹异步和系统误差对算法性能的影响随着时间的推移不断扩大。对此,以基准航迹为准,根据本文上述对目标机动性能的分析,推算下一时刻雷达探测得到的目标位置所在区域;然后根据系统误差对航迹的影响,将航迹推算得到系统误差灰区域。通过这种方法减小由于时域配准而带来的误差以及由于系统误差造成的航迹位置偏移给算法带来的影响。 以雷达B的航迹集合Γb(h)为基准,根据雷达A的航迹集合Γa(k),推算出航迹Γa(k)在航迹Γb(h)时刻的目标所在位置灰区域,即将Γa(k)转化为Γa(h)。 按上文算法,推算出航迹集合Γa(h)、Γb(h)的目标真实位置所在区域,并将目标真实位置灰区域分解到x、y轴上,转化为两个区间(min(Xa),max(Xa))、(min(Ya),max(Ya))。如图8所示。 图8 灰区域分解示意图 雷达A:Γa(h)经过二度放大得到的灰区域四个点坐标为 Xa=Ra·Φa1、Ya=Ra·Φa2 (17) 雷达B灰区域分解与雷达A灰区域分解相似,这里不再赘述。 从雷达B集合Γb(h)中选取一条航迹作为待识别航迹,将雷达A的航迹集合Γa(h)作为已知航迹,判断航迹集合Γa(h)中哪条航迹和待识别航迹来自同一目标。 将k时刻的来自雷达B的一条待识别航迹与雷达A的所有航迹组成决策矩阵Ψ,即 (18) 式中(min(Xb),max(Xb))j、(min(Ya),max(Ya))j为雷达B的第j条待识别航迹,(min(Xa),max(Xa))、(min(Yb),max(Yb))为雷达A的所有航迹集合,即已知航迹。 将第Ns+1行与前Ns比较,分别求其航迹灰关联度,即 (19) (20) (21) 区间相离度表示两个区间的相对距离远近,区间相离度越小,两个灰区域越近,同时两个航迹点来自同一目标的概率也就越大。ρ为分辨系数,这里取0.5。 设阈值σ=0.97,若航迹对关联正确且γij≥σ,则认为关联正确;若航迹对关联正确且γij<σ,则认为漏关联;否则认为关联错误。 为了方便评估算法的性能,引入航迹正确关联率,即 (22) 式中N是每次仿真的目标数,M是蒙特卡洛仿真次数,Eci(k)是每次仿真正确关联的航迹对数。 雷达A的坐标为(0,0),雷达B的坐标为(100 km,0)。假设目标的起始速度方向和大小分别为0~2 πrad、200~400 m/s,起始区域位为40 km×40 km的矩形区域,目标批次为20。假设目标最小转弯半径为700 m,最大转弯角速度为 21.7°/s,最小最大加速度均为5 m/s2。 算法性能受很多因素影响,包括密集度、系统误差、距离、方位角等方面,下面就上述因素对本文算法与文献[9]算法进行比较分析。 场景一:雷达A的测距系统误差、测角系统误差为100 m、0.5×π/180 rad,雷达B的测距系统误差、测角系统误差为-100 m、-0.5×π/180 rad;两雷达均具有50 m、0.5°的量测随机误差。目标在40 km×40 km的矩形区域内做匀速直线运动,目标的运动速度在200 m/s~400 m/s之间。 场景二:雷达B的测距系统误差、测角系统误差为200 m、1.5×π/180 rad,雷达B的测距系统误差、测角系统误差为-200 m、-1.5×π/180;两雷达均具有50 m、0.5°的量测随机误差。目标在40 km×40 km的矩形区域内做变速直线运动,目标的运动速度在200 m/s~400 m/s之间。 图9 场景一下两种算法航迹正确关联率对比 图10 场景二下两种算法航迹正确关联率对比 通过比较分析图9和图10得,在系统误差较小的情况下,本文算法以及区实混合序列算法都有较高的正确关联率,在20步时正确关联率均能达到95%以上。当系统误差变大时,本文算法性能变化较小,其抗差性能较好;区实算法亦对系统误差具有一定抗性。 算法性能亦可能受到方位角、距离等因素的影响。目标区域中心以两部雷达连线的中垂线以北为0°,逆时针旋转180°,观察航迹正确关联率随角度变化的影响。目标区域中心位于两部雷达连线中点,此时记距离为0 km,不断向北移动目标区域,观察其随着距离增加航迹正确关联率的变化。 图11 场景一下距离对两种算法正确关联率的影响对比 通过综合分析图11得,距离对区间相离度算法影响较大,而其他两种算法受距离影响较小;随着距离的增大,目标真实位置灰区域不断变大,由此导致错误关联的概率增大;区间相离度算法的正确关联率下降,在100 km时正确关联率为90%。 图12 场景一下方位角对两种算法正确关联率的影响对比 通过分析图12得,方位角对本文算法的性能影响较大,随着方位角变化,正确关联率有一定程度的减小,在90°时灰关联算法的正确关联率最低,约为80%左右;而区实混合序列相似度算法受方位角影响不大。 分析表1得,在任意周期比情况下,本文算法均能保持很高的正确关联率;随着目标运动速度的增大,正确关联率减小。 表1 不同雷达采样周期、目标速度大小对算法性能的影响 仿真采用蒙特卡洛方法,下面就每次算法关联过程耗时进行仿真分析。 图13 场景一下两种算法耗时对比 分析图13得,本文算法与区实混合序列相似度算法相比,算法耗时有一定程度的提高。 本文研究分析了雷达采样时间差以及雷达系统误差对航迹量测值的影响,结合对目标机动能力的分析,提出了一种无须时域配准且具有一定抗差能力的异步航迹关联算法。并将本文算法与文献[9]中的区实混合序列算法就系统误差、密集度、距离、方位角、算法耗时等方面进行了仿真比较分析,得到以下结论: 1)在抗系统误差方面,本文算法与无须时域配准的区实序列相似度算法相比,更为优异,在大系统误差时,本文算法仍能达到95%。 2)区实混合序列相似度算法需要预知雷达采样速率比,导致算法适用性较低,而本文算法无须预知速率比,在任何情况下均可适用。 3)本文算法耗时较长,稍高于区实混合序列相似度算法,这也将是下一步研究的重点。



2 航迹异步分析
2.1 目标运动特性分析


2.2 目标位置灰区域描述




3 系统误差表示
3.1 航迹点系统误差表示

3.2 目标机动区域系统误差表示








4 算法步骤






5 仿真分析





6 结束语
