低速风洞飞行器模型编队飞行绳系并联支撑机构
2019-12-09吴惠松林麒彭苗娇柳汀冀洋锋王晓光
吴惠松,林麒,彭苗娇,柳汀,冀洋锋,王晓光
厦门大学 航空航天学院,厦门 361102
风洞试验是获取飞行器气动参数的重要手段。在风洞中实现飞行器模型编队飞行对获取飞行器编队飞行时的气动参数具有重要的工程意义,对飞行器设计及编队飞行具有指导价值[1]。
飞行器编队飞行可以克服单架飞行器执行任务时所不能克服的问题, 具有较好的发展前景[2]。传统的飞行器模型编队飞行的风洞试验支撑平台主要以硬式支撑为主,刘志勇等[3]采用了尾式支撑方式对2组飞行器模型编队飞行进行风洞试验,分别为2架翼身组合体模型和2架飞翼模型,研究后机受前机尾涡流的影响情况。William和David[4]研究并比较了飞翼模型编队飞行前后机干扰效应的理论预测和腹式支撑的风洞试验结果。Hwankee等[5]采用尾式支撑方式对2架固定翼战机模型编队飞行气动特性进行试验研究,Bangash等[6]采用腹式支撑方式研究了固定翼飞机编队飞行气动特性的风洞试验结果,此外,美国NASA的Ronald等[7]还对2架F/A-18编队飞行的阻力和燃油性能进行了空中飞行试验研究,验证了理论预测和真实试验结果的一致性。
传统的风洞试验支撑方式因硬式支架对流场产生干扰而影响试验结果[8-10]。基于并联机器人技术的绳牵引并联软式支撑机构可以克服传统硬式支撑的不足[11-12],且可以同时完成多种姿态试验,具有刚度高、工作空间大等诸多优点而使其研究及应用成为热点[13-15]。
目前绳牵引并联支撑方式主要应用于低速风洞试验,如法国国家航空研究局支持的“SACSO”项目,其已将绳牵引支撑方式应用于立式风洞测力试验[16-17]。美国佐治亚理工大学的Lambert等[18]采用8根绳牵引的六自由度机构对钝体模型进行了风洞试验,并研究了该套支撑下的模型流动控制。Huang等[19]研究了绳牵引并联支撑系统的刚度等重要问题,文献[20-23]构建了一套8根绳牵引的六自由度并联支撑系统WDPR-8(Wire-Driven Parallel Robot with 8 wires),并成功地应用于低速风洞试验,获得飞行器模型的气动参数和动导数,研究了系统的刚度。文献[24-26]对柔索驱动并联机构的工作空间问题及其优化进行了研究。文献[27-28]研究了六自由度绳系并联机器人的绳系时变结构,建立了单自由度时变运动方程。
本文以双绳牵引并联机构作为飞行器模型编队飞行的风洞试验支撑平台,基于可移动滑轮与飞行器模型编队飞行协同运动,通过绳系之间、绳与模型之间干涉分析和反馈,实现飞行器模型编队飞行的位姿调整,并解决飞行器模型之间相对位置的保持问题。相比传统飞行器模型编队飞行的硬式支撑机构,该机构能实现六自由度运动控制,且采用绳牵引支撑方式能减小支撑对流场的干扰。本文的飞行器模型编队飞行支撑机构不是单架飞行器模型绳牵引并联机构支撑的简单迭加,而是一个基于设计的可移动滑轮的双绳牵引并联机器人与编队飞行的飞行器模型协同运动的复杂并联机器人系统。文中以直升机为例,设计了一种用于直升机编队飞行风洞试验模型的双绳牵引并联支撑机构,对该机构进行相关的运动学建模,最后对机构进行刚度分析,研究系统的稳定性并对机构进行了运动干涉分析。该机构能实现模型的六自由度运动控制,有效解决前后机的相对位置保持问题,可模拟直升机编队在有限空间通道中的飞行与着陆,便于通过风洞试验研究前后机之间的气流影响。
1 绳牵引并联支撑机构设计
1.1 牵引机构组成及参数
绳牵引并联机构中,由于绳受单向拉力,若要实现牵引控制需要采用冗余约束机构,对于n自由度机构需要n+1根绳来牵引[29]。本文为实现2架直升机模型编队飞行的六自由度运动,设计了双绳牵引并联支撑机构,每个支撑机构都是一个WDPR-8,其原理样机如图1所示。
图1中直升机模型尺寸参照合金仿真模型摆件,重2.5 kg,机身含旋翼总长550 mm,机身宽60 mm,机身含旋翼高100 mm,旋翼外圆直径为480 mm,不考虑尾桨,参考长度为391 mm,迎风参考面积为32 062 mm2。根据上述模型参数,选用直径为1 mm的Kevlar绳(弹性模量为43.9 GPa)。
模型姿态调整范围以前后(纵轴,沿x方向)、左右(横轴,沿y方向)、上下(立轴,沿z方向)3个方向的平动和绕立轴的偏航为主,模型在俯仰和滚转2个自由度下只能在小范围内变化,以模型质心为参考点,上下方向位置变化范围约3倍机身高,前后方向位置变化范围约3倍机身总长,左右位置变化范围约3倍机身宽,俯仰、偏航、滚转角的变化范围均为±15°。2架直升机编队飞行,间距为一个机身总长,相对位置可调整,且直升机模型距离两侧障碍物为一个旋翼宽度。若按模型运动范围确定试验段最小尺寸,长×宽×高为3 850 mm×1 620 mm×400 mm,则堵塞度约为4.9%。
为模拟直升机双机编队飞行在有限空间通道中的飞行与着陆,模型需降落在假想地面上,机架具体结构参数需根据直升机着陆周围障碍物、直升机模型外形和运动规律进行设计。

为确定绳牵引点在模型和机架上的位置,在原理样机中分别建立全局静坐标系OXYZ和2个局部动坐标系Pxyz,P′x′y′z′,P和P′分别为2个动坐标系的原点。全局坐标系与机架固连,2个动坐标系分别建立在2架直升机模型质心上,质心P和P′在全局坐标系OXYZ下的坐标分别为(0,0,-150) mm和(-1 100,0,-150) mm,长机模型上牵引点布局如图2所示,2架直升机模型上牵引点和滑轮铰点具体坐标见表1。

图2 模型上的连接点Fig.2 Joint points on model
1.2 牵引绳布置方法
为分析上述建立的绳牵引机构,本节详细介绍牵引绳系结构的设计方法。
根据单机模型尺寸和飞行任务要求,设计牵引绳系结构既要保证能够对直升机模型进行运动控制,又要保证牵引绳与模型不发生干涉。由于模型具有转动旋翼,且旋翼的转动平面较大,而机身高度相比较小。为研究分析方便,将旋翼及其工作空间视为一个刚性圆盘。盘的直径即旋翼的旋转平面直径(如上所述,为480 mm),厚度参照桨叶的厚度及旋转的工作特点,取为2 mm。
采用8根牵引绳系结构,且以模型的对称面对称布置。为了使模型实现各方向的平动,设计8根绳的绳系结构中,4根绳向上牵引模型,4根绳向下牵引模型,使其运动稳定可控。因此绳系结构的设计方案如图2所示,图中蓝色线条表示牵引绳。
1.2.1 向上牵引的4根绳布置

如图4所示,在模型侧面投影方向上,绳与模型旋翼产生干涉时的最大角度α2为13°,为满足直升机模型上升所需高度要求和防止绳与模型旋翼产生干涉,在保持α2不变的前提下,将滑轮铰点Bi沿着绳索方向延长线进行布置。通过计算,当模型运动到所需极限高度时,滑轮铰点Bi比模型上绳牵引点Pi在z方向高出46 mm,能满足直升机模型上升3个机身高度所需要求。

图3 模型正面投影方向尺寸说明Fig.3 Dimension description of model frontal projection

图4 模型侧面投影方向尺寸说明Fig.4 Dimension description of model side projection
如图5所示,在模型俯视投影方向上,模型向前(或向后)运动到极限位置时,绳与机身的夹角α3最小,为28°,说明绳与模型机身不产生干涉,此时模型被向前(或向后)牵引且两侧对称的2根绳接近平行横轴线,绳拉力很大,所以在模型前后极限位置的基础上各预留一个机身的长度,使向前(或向后)拉的两根绳成一夹角α4。

图5 模型俯视投影方向尺寸说明Fig.5 Dimension description of model vertical projection
1.2.2 向下牵引的4根绳布置
考虑模型需完全降落到假想地面上,在不改变飞行环境周围障碍物空间结构条件下,向下牵引的4根绳的滑轮铰点Bi需布置在假想地面与障碍物相接处。
因模型前后运动范围较大,向下牵引的4根绳的滑轮铰点Bi若布置在模型的前后运动范围之外,向下牵引的4根绳的合力很难克服直升机升力使得模型完全降落到假想地面上,且在双机编队时2架直升机之间的绳索很容易产生干涉现象。


图6 向下牵引的4根绳布置Fig.6 Arrangement of 4 wires to pull down
1.2.3 双机编队绳系结构布置
双机编队同姿态飞行不仅需要满足单架直升机模型姿态运动范围,还需满足2架直升机模型间的绳索互不干涉。若按上述单架直升机模型的绳牵引布置形式和本文编队飞行工况要求,以模型质心为参考点,模型质心间距需为1 100 mm,但此时长机模型的后端2根绳W3和W4刚好与僚机模型的前端2根绳W′2和W′1交叉干涉,如图7所示。
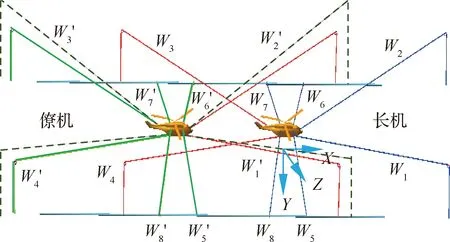
图7 双机编队飞行绳系布置形式Fig.7 Wire arrangement form of two helicopter models in formation flight
为避免上述绳索干涉,在保证牵引绳不与直升机模型旋翼干涉的条件下,将僚机模型的牵引绳上的滑轮牵引点沿机架上的X和Z方向移动一定的距离(Y方向受两侧障碍物间距的约束),使得原先互相干涉的绳(W3与W′2,W4与W′1)有一定的间距。
2 系统运动学模型
2.1 单机系统运动学建模
在风洞试验中,直升机模型的位置和姿态角的调整是通过改变各牵引绳的长度变化来实现的。通过建立牵引绳长度与直升机模型位置姿态之间的运动学关系,实现对直升机模型的运动控制。
单机系统运动学关系示意图如图8所示。模型(图中抽象为十字架)由2组牵引绳牵引实现六自由度运动,第1组牵引绳(W1~W4)连接于机架上的固定万向滑轮(图中蓝色Bi点),第2组牵引绳(W5~W8)连接于丝杆组件上的可移动万向滑轮(图中绿色Bi点),可移动万向滑轮由电机驱动沿滚珠丝杆移动,与直升机模型从t=0 s的P(0)到P(t)协同运动(t表示>0 s的某一时刻)。

图8 单架直升机模型系统运动学关系示意图Fig.8 Kinematics relation schematic of single helicopter model system
Li=XP+Rri-Bi
(1)
式中:R为模型上局部动坐标系到全局静坐标系的旋转变换矩阵。
第2组绳长矢量Li(i=5,6,7,8)仍满足式(1),根据可移动万向滑轮铰点Bi沿滚珠丝杆与直升机模型协同运动规律,铰点Bi满足:
(2)
式中:XBi(t)为铰点Bi的运动规律;XP(t)为直升机模型在任意时刻t时,质心P点在全局静坐标系OXYZ中的X坐标;Δd为模型质心P与可移动铰点Bi沿X方向的固定偏差。假设直升机模型做任意自由度运动时,均满足|XBi(t)|=|XP(t)|±|Δd|,使得可移动滑轮与直升机模型协同运动。

(3)

(4)
式中:ui(i=1,2,…,8)为各牵引绳的绳长单位向量,定义为ui=Li/Li,Li=|Li|(i=1,2,…,8)。

2.2 双机编队飞行运动学建模
编队飞行主要是研究僚机受长机尾涡流影响致其气动性能的变化,本文编队飞行中的双机模型在三维空间中的相对位置和姿态角可以通过调整各牵引绳的长度来实现,如图9所示。

图9 双机编队飞行运动学关系示意图Fig.9 Kinematics relation schematic of two helicopter models in formation flight
双机编队飞行运动学建模是2套单机系统运动学的有效结合,其相对位置是以全局静坐标系OXYZ为基准参考,应用科里奥利方程可得
(5)
式中:XR为僚机动坐标系中僚机指向长机的向量;ωP′=[ωx′,ωy′,ωz′]T为僚机模型的角速度矢量。根据刚体绕定点转动原理,可得
(6)
在僚机坐标系中,两机在3个方向的距离变化率[2]为
(7)
式中:VP和VP′分别表示长机和僚机模型的速度;θP和ψP分别表示长机模型的俯仰角和偏航角。
通过式(7)可以描述两机编队飞行的相对位置运动学关系,一旦两机的相对位置偏离了预置值,可以通过调整绳长实现两机之间的纵向距离、横向间隔和垂向高度差的控制。假若给定僚机的运动学参数(速度、姿态角和3个方向的距离分量),通过式(5)~式(7)可求出长机的运动学参数(两机之间的理论相对位置参数),并将结果代入式(1)求解得出长机各牵引绳长,通过调整绳长实现两机之间相对位置和姿态角的改变,实现两机编队飞行的六自由度位姿的运动控制。
2.3 运动学仿真分析
为验证所设计机构的可行性,将直升机模型按预定轨迹路线进行编队飞行仿真,即按轨迹变化求出位姿变化,通过式(1)运动学逆解求出绳长变化量,并将其添加到ADAMS多体动力学仿真软件中绳长变化对应的滑块驱动中,实现直升机模型绳系支撑的编队飞行仿真。假设轨迹为:“前移至极限位置→右移至极限位置→下移至极限位置→偏航15°”,为简化分析,暂不考虑气流扰动引起的两机相对位姿变化,两机相对位姿按初始间距保持不变进行仿真,长机质心P为(0,0,-130) mm,僚机质心P′为(-890,0,-130) mm,初始姿态角均为(0°,0°,0°),长机模型上各牵引绳绳长变化量如图10所示,各绳拉力如图11所示(图中Wire 1~Wire 8表示对应的8根牵引绳)。

图10 长机模型按指定轨迹路线飞行时的绳长变化Fig.10 Variation of each wire length while lead helicopter flies according to a predetermined trajectory

图11 长机模型按指定轨迹路线飞行时的绳拉力变化Fig.11 Variation of each wire tension while lead helicopter flies according to a predetermined trajectory
向下牵引的4根绳W5~W8拉力随着模型的前移,绳拉力呈增大趋势,这是因为随着模型的前移,模型前端向上牵引的两根绳W1、W2与模型旋翼距离越来越近,绳拉力向上的分力越来越大,导致模型俯仰角呈增大趋势,且模型因为升力的作用,为保持模型平稳按指定轨迹路线飞行,向下牵引的4根绳W5~W8拉力势必增大。
3 刚度分析
3.1 系统静刚度分析
风洞试验中,直升机模型在来流的作用下,由于自身旋翼的旋转,机构的刚度是支撑机构安全稳定工作需考虑的重要因素。
对于本文的绳牵引并联机构,直升机模型所受的力螺旋平衡方程可表示为
(8)
式中:WR为作用在直升机模型上的力螺旋矢量;T为绳拉力矩阵。
直升机模型的位姿X=[XP,YP,ZP,φ,θ,ψ]T,当WR存在一个微小的变化量∂WR时,直升机模型对应有一个微小变化量∂X,基于微分变换原理,绳牵引并联机构的静刚度满足:
∂WR=K∂X
(9)
式中:K为静刚度矩阵。
当力螺旋矢量施加在直升机模型上时,绳长矢量L相应有一个微小的变化量∂L。根据虚功原理,∂L和∂X满足:
(10)
通过式(8)~式(10)的推导,可得到直升机模型绳牵引并联机构静刚度K的表达式。它分为两部分[22],即
K=K1+K2
(11)
式中:
(12)
其中:I3为3阶单位矩阵;Ui为与绳长及牵引点有关的矩阵;Ti为绳拉力。
K1与绳拉力有关,通过调整绳拉力大小调整系统的整体刚度。K2与系统的绳系结构和绳牵引布置点及模型的位姿有关。
模型由各牵引绳牵引,假设在只承受重力作用下,通过绳拉力分布和系统整体静刚度计算,可算得第1部分刚度K1=[513 273 752 13 39
57],第2部分刚度K2=[59 130 167 050 5 220
分析表明,机构沿OX、OY、OZ轴的平动刚度较大,绕OZ轴的转动(偏航)刚度比绕OX、OY轴的转动刚度大,符合机构以前后、左右、上下3个方向的平动和偏航为主的姿态调整要求。模型绕OX轴的转动(滚转)刚度最小,这是因为提供滚转刚度的牵引绳受机身尺寸和航路宽度的限制,直升机模型上的牵引点过于集中导致作用力臂太短。
3.2 系统动刚度试验验证
直升机模型旋翼旋转产生的对机体本身的扭矩属于直升机本身的内力,由尾桨产生的反扭矩平衡,理论上对系统刚度不产生明显影响。本文也通过试验验证了直升机旋翼运动对文中飞行器模型绳牵引支撑系统的影响。
试验采用单架共轴双旋翼直升机模型来研究旋翼转动对支撑系统的影响,为考虑单个旋翼对模型造成的不对称受力(扭矩)的影响,特意使其中一个旋翼不转动。模型重1.5 kg,机身含旋翼总长700 mm,机身宽80 mm,机身含旋翼高160 mm,旋翼外圆直径为450 mm,旋翼转速约2 000 r/min。绳牵引点按本文支撑方案的形式进行布置,如图12所示。

图12 旋翼转动对支撑系统的影响试验Fig.12 Test of influence of rotor rotation on support system
试验通过直升机模型旋翼转动前后的绳拉力变化及模型姿态角变化来分析旋翼转动对该绳牵引支撑系统的影响。试验中采用DYLY-108微S型拉压力传感器测量绳拉力,采用AHRS航姿参考系统测量模型姿态角。
8根直径为1 mm的凯夫拉牵引绳W1~W8的初始预紧力分别为33.23、19.21、25.64、26.57、22.37、15.23、19.37、14.07 N,旋翼转动前后8根牵引绳的拉力变化量如图13所示,图13(a)是旋翼转动前拉力传感器所测各绳拉力的变化量(即零漂值),图13(b)是旋翼转速稳定后拉力传感器所测各绳拉力的变化量,试验结果表明,向下牵引的4根绳W5~W8拉力因旋翼转动提供升力,绳拉力变化量为正值说明绳拉力增大,
向上牵引的4根绳W1~W4拉力变化量为负值说明绳拉力减小,但变化幅度都不大;且随旋翼的转动,8根绳的拉力变化量均没有明显的振荡现象,振荡带宽最大为 0.08 N,说明旋翼转动对绳拉力影响不大。
图14为旋翼转动前后模型姿态角变化量,试验结果表明,旋翼转动对俯仰角影响较小,约为0.05°;由于单旋翼转动产生单向扭矩,偏航角变化较明显,约为0.13°;因直升机模型机身尺寸较小决定了该绳系支撑的滚转刚度也较小,所以旋翼转动时,滚转角也受影响,约为0.1°。旋翼转动前后模型3个姿态角变化带宽最大为0.13°,说明旋翼转动前后对模型姿态角影响很有限,且不发散。这样的偏差是可以在后期的样机里通过一定的控制策略得到纠正的。


图13 旋翼转动前后绳拉力变化Fig.13 Variation of wire tension before and after rotor rotation

图14 旋翼转动前后模型姿态角变化Fig.14 Variation of model attitude angle before and after rotor rotation
虽然上述试验是在无风条件下进行的,但结果仍然说明由直升机模型旋翼运动产生的振动对该支撑系统的影响很小,说明该WDPR-8支撑系统不仅适用于固定翼飞行器模型,也适用于直升机旋翼模型。
4 干涉分析
在绳牵引并联支撑机构满足系统刚度要求的同时,其牵引绳布置形式也决定了机构工作空间的大小。而绳与绳、模型与绳、模型与周围障碍物间的干涉约束制约了其工作空间的大小。
用绳系牵引2架直升机模型编队飞行,绳的干涉现象在所难免。因此,需要考虑模型在不同姿态的运动范围内编队飞行时绳与绳之间、模型与牵引绳之间、模型与周围障碍物之间的干涉问题。
4.1 绳索之间干涉分析
判断2根牵引绳索是否干涉,通常采用2根绳索之间的公垂线长度dmin作为判断依据,通过设置干涉阈值,即以dmin<ε作为判断干涉的条件。上述条件只考虑绳索间的公垂线长度,没有考虑公垂线矢量方向,因此需要判断即将干涉的两绳索之间的空间几何位置关系。
如图15所示,两绳索间的最短距离均是dmin,绳索PjBj与平面PiBiPj的位置关系s的表达式为[26]
(13)
通过判断s的符号正负来确定绳索PjBj与平面PiBiPj是否产生干涉,具体定义为
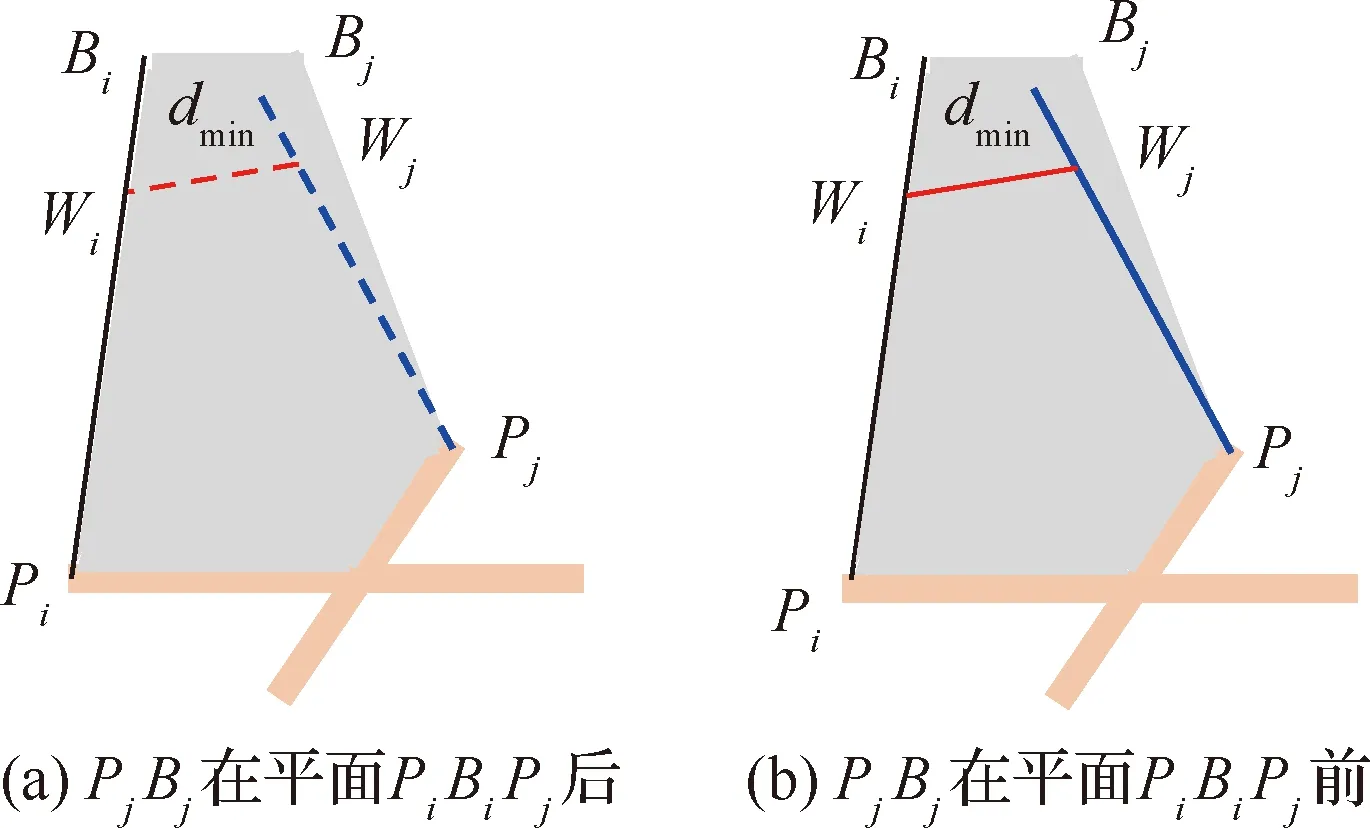
图15 单机绳索与平面PiBiPj的空间几何位置关系Fig.15 Spatial geometric position relation between wires of single helicopter and plane PiBiPj

(14)
若s在模型位姿变化前后符号发生变化,则说明绳索PjBj与绳索PiBi产生干涉现象。本文单架直升机模型因其绳系布置形式不存在绳索之间的干涉问题,主要是两架直升机编队飞行过程中长机向后牵引的绳W3、W4与僚机向前牵引的绳W′2、W′1之间容易产生干涉,如图16所示,干涉判断方法与上述方法类似。

图16 双机编队飞行绳索干涉分析Fig.16 Interference analysis of wires of two helicopters in formation flight
通过仿真计算得出,两机编队飞行在重力、升力、空气阻力和各绳预紧力作用下,按“前移至极限位置→右移至极限位置→下移至极限位置→偏航至极限位置”轨迹路线飞行,两机的牵引绳索(W3与W′2、W4与W′1)之间间距如图17所示。
由于模型和绳系结构的对称性,在初始时刻,绳索间距是相等的,dmin=24.67 mm,当模型偏航时,绳索W4与W′1间距增大,绳索W3与W′2间距减小,符合该绳系结构特征,计算结果说明两机按该轨迹路线编队飞行,绳索之间不产生干涉。模型在上述4个极限位置编队飞行时,两机绳索之间最短间距汇总如表2所示。

图17 双机编队飞行绳索间距分析Fig.17 Distance analysis of wires of two helicopters in formation flight
计算结果说明两架直升机编队飞行,绳索之间不产生干涉,验证了该绳系结构的可靠性。
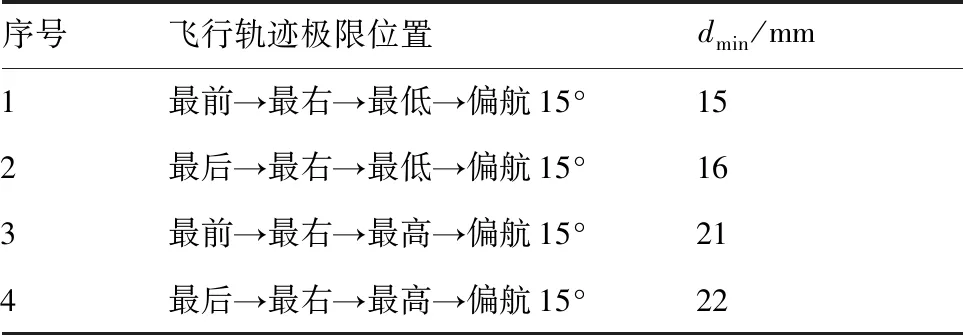
表2 绳索之间最短间距Table 2 Shortest distance between wires
4.2 绳与模型之间干涉分析
本文绳与模型之间的干涉主要是绳与直升机旋翼的干涉,可以用每时刻的绳所在直线方程与模型旋翼平面方程是否有共同解求出是否干涉,如图18所示,在重力、外力和绳拉力的作用下,直升机模型在不同时刻,由于姿态的变化,绳与模型旋翼之间的最短距离dmin也跟着变化。
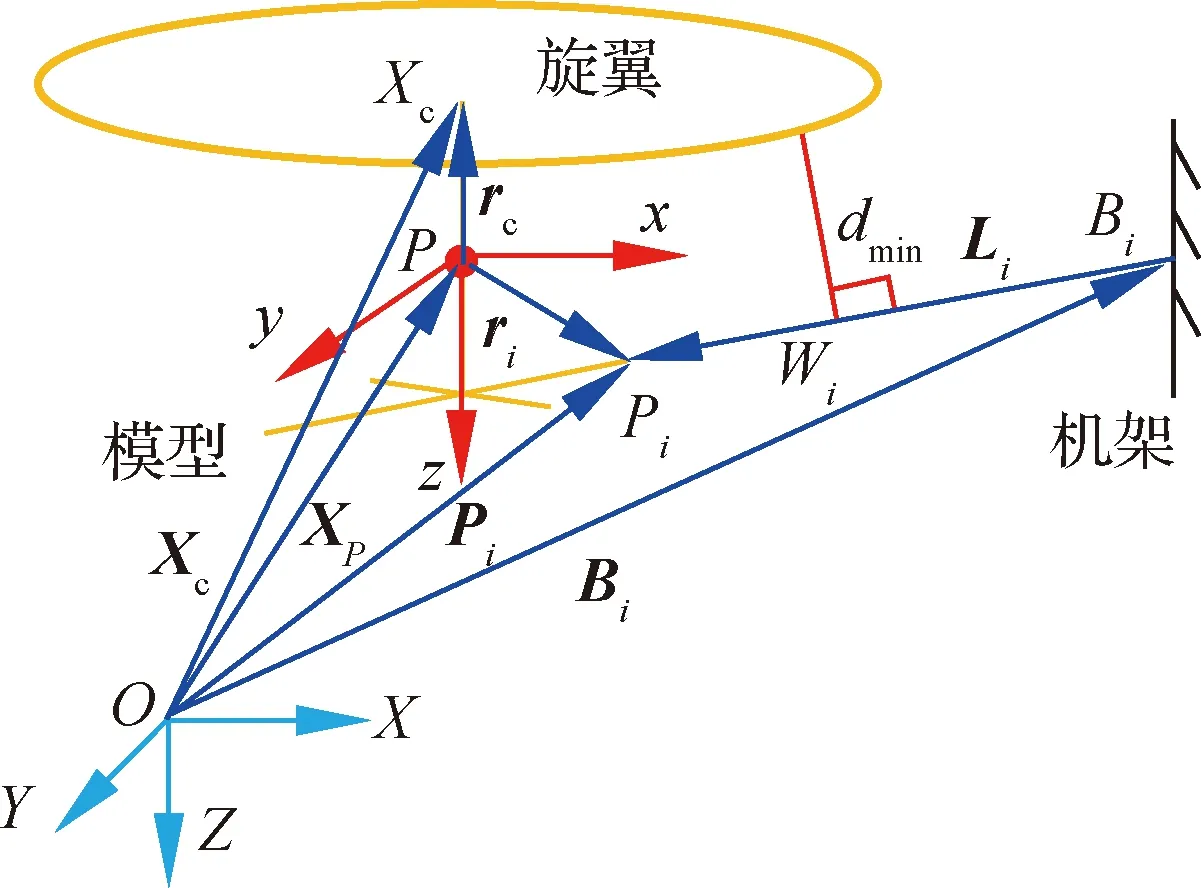
图18 绳与模型旋翼干涉分析Fig.18 Interference analysis of wires and model rotor
直升机模型旋翼圆心坐标Xc(X0,Y0,Z0)满足矢量三角形:
Xc=XP+Rrc
(15)

A(x-X0)+B(y-Y0)+C(z-Z0)=0
(16)
且由法向量m=[A,B,C]和旋翼圆盘平面确定的空间圆的参数方程为
(17)
绳索PiBi所在直线方程为
(18)
式(17)~式(18)中:
(19)
联立式(15)~式(19)求解,若存在共同根,说明绳与模型旋翼圆平面产生干涉。
当模型处于极限位置时,绳与模型旋翼圆平面最可能产生干涉现象,此时绳与直升机模型旋翼平面最短距离dmin汇总如表3所示。
计算结果说明两架直升机编队飞行,绳索与模型旋翼均不产生干涉,验证了该绳系结构的可靠性。
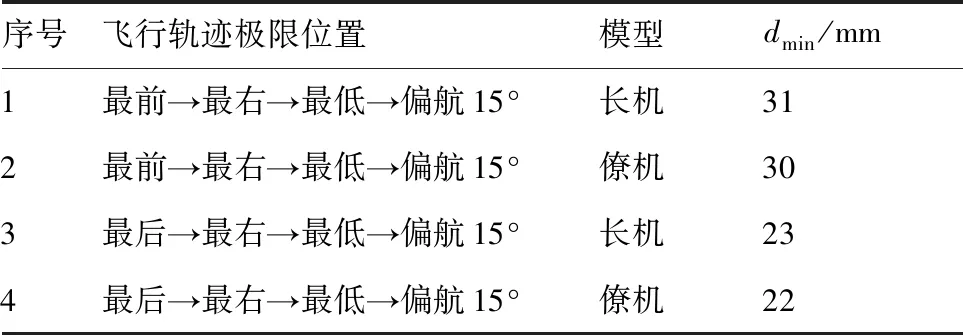
表3 绳与模型旋翼平面之间最短间距Table 3 Shortest distance between wires and model rotor plane
5 结 论
本文以直升机为例,设计了一种用于飞行器编队飞行模拟在有限空间通道中飞行与着陆的风洞试验模型绳牵引并联支撑机构。通过建模、仿真分析和试验验证完成了以下工作。
1) 设计了双绳牵引并联机构协同工作的直升机双机编队飞行的风洞试验模型支撑机构。
2) 为解决双机编队飞行时的绳系干涉问题,采用可移动滑轮使2个绳牵引并联机构的绳系结构均能随时间重构,做到在实现双机编队飞行协同运动的同时,有效解决绳之间、绳与模型之间的干涉问题。
3) 通过运动控制仿真,包括对牵引绳长度、绳拉力的分析,验证了2个可重构绳系结构的绳牵引并联机构的运动学模型的有效性,可实现六自由度的编队协同飞行。
4) 通过绳与绳、绳与模型的间距干涉算法及分析,表明通过可移动滑轮重构绳系结构的设计方案是可行的。
5) 对直升机旋翼模型的绳牵引支撑系统进行了静刚度分析,并通过试验验证了直升机模型旋翼运动对文中的绳牵引并联支撑系统动刚度的影响很小。
本文设计的支撑机构有助于模拟编队飞行的飞行器模型之间气流的相互影响,提高风洞试验结果的有效性和可信度,为风洞试验飞行器模型编队飞行设计绳系并联支撑机构提供参考。