扑翼机自稳飞控系统的模型构建与仿真研究*
2019-12-07王唱赵华
王唱,赵华
扑翼机自稳飞控系统的模型构建与仿真研究*
王唱,赵华
(沈阳航空航天大学,辽宁 沈阳 110136)
主要对扑翼机的自稳飞行控制系统进行了分析,从而构建模型并进行仿真研究。以鸟类扑翼飞行运动为研究对象,以扑动飞行过程中的机械结构为基础,逐步建立二维和三维运动方程,结合自动控制工程原理、高等微积分、复变函数等基础原理,对复杂的参量输入数据进行多项变换和简化处理,从而转化为可控性高、可视化效果好的信号输出。结合具体算法使用matlab软件进行优化处理,更好地对模型自稳系统做仿真数据分析。
扑翼机;自稳控制;航空航天技术;飞行事业
随着近现代的飞行事业和航空航天技术的迅猛发展,扑翼飞行器作为一种独具特色的飞行器,通过仿生学的研究和空气动力学的实践证实,具有比旋翼飞行器和固定翼更高效、更稳定、更安全的飞行优势。
1 系统结构的分析与建模
扑翼飞行器除了能进行一般飞行器的升降、俯仰、偏航的空间六自由度独立运动外,还有对称扑动和自稳控制,提高了研究内容的挑战性。智能化的扑翼机与四旋翼飞行器相比,在自稳性控制系统方面的研究亟待提高。
1.1 飞控系统的主要模块及功能
飞控系统硬件部分主要有陀螺仪(用于检测飞行姿态)、加速计(用于检测飞行姿态)、地磁感应飞控、气压传感器(用于控制悬停高度)、超声波传感器(可以在低空时高度精确控制或自动避障)、光流传感器(用于悬停水平位置精确确定)、GPS模块(用于水平位置高度粗略定位)以及控制电路(包括滤波电路等,进行信息处理和反馈等)。通过以上模块的综合作用,达到一定范围内自动保持正常飞行姿态的要求。
1.2 结构分析与三维建模
对仿鸟类扑翼飞行器的驱动机构、扑翼结构及尾翼结构进行了初步设计,对扑翼机翅膀的扑动进行仿生学和运动学分析,采用双曲柄摇杆结构将翅膀的转动转化为扑动,尾翼处用标准舵机控制舵面,采用三舵机联合驱动机构(包括联动摇杆),矫正并控制飞行姿态,从而实现空间六自由度运动完成扑翼机的俯仰、滚转、偏航等飞行形式。
采用Solidworks三维绘图软件,对飞行器内部的机械和电子部分结构进行设计、建模和渲染,如图1所示。
以扑翼机构与可变后掠翼机构中的对称结构为模型焦点,将双摇杆机构拓展为一般性的统一立体,其中通过平面连杆机构基本方程建立摇杆同步性能的优化设计数学模型,引入摇杆转角偏差小量假设和极限位置对称性假设,利用泰勒展开公式,求解出最优设计变量的理论关系式,结合大量的机构仿真试验研究,借助数学物理方法得到近似经验公式与设计曲线图,从而解决单曲柄双摇杆机构同步性能优化问题,同时间接验证了该模型分析法的工程实用性。
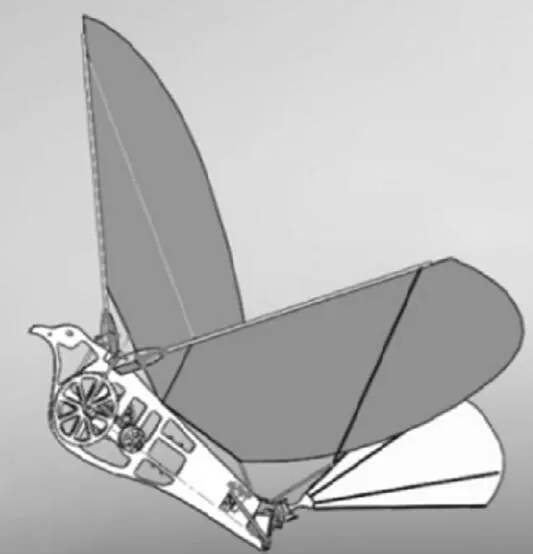
图1 扑翼机三维模型
利用Solidworks建模,采用高分辨率对扑翼动作进行分析,如图2所示,扑翼机模拟飞行对称性能良好。
2 算法融合与控制反馈
通过对三轴加速度和角速度的检测,将采集到的数据进行算法融合处理,产生输出信号,作用于控制端的执行元件,借助控制系统和电调的综合作用,实现对中心电机的速度控制和尾部舵机运动的角度控制。在数据处理和运动作用的过程中,算法采用两次融合负反馈调节的理论及方法,将其进行反馈处理,使实际中的调节控制有更好的稳定性、精确性和可靠性。在处理各个传感器的数据时,不宜单独分析,因为其中一些数据会相互影响,不满足独立性原则,所以需要进行科学的融合。将扑翼机中的加速度计和陀螺仪采集的数据进行融合处理,可极大地避免出现测量姿态角度的漂移,避免造成系统误差。
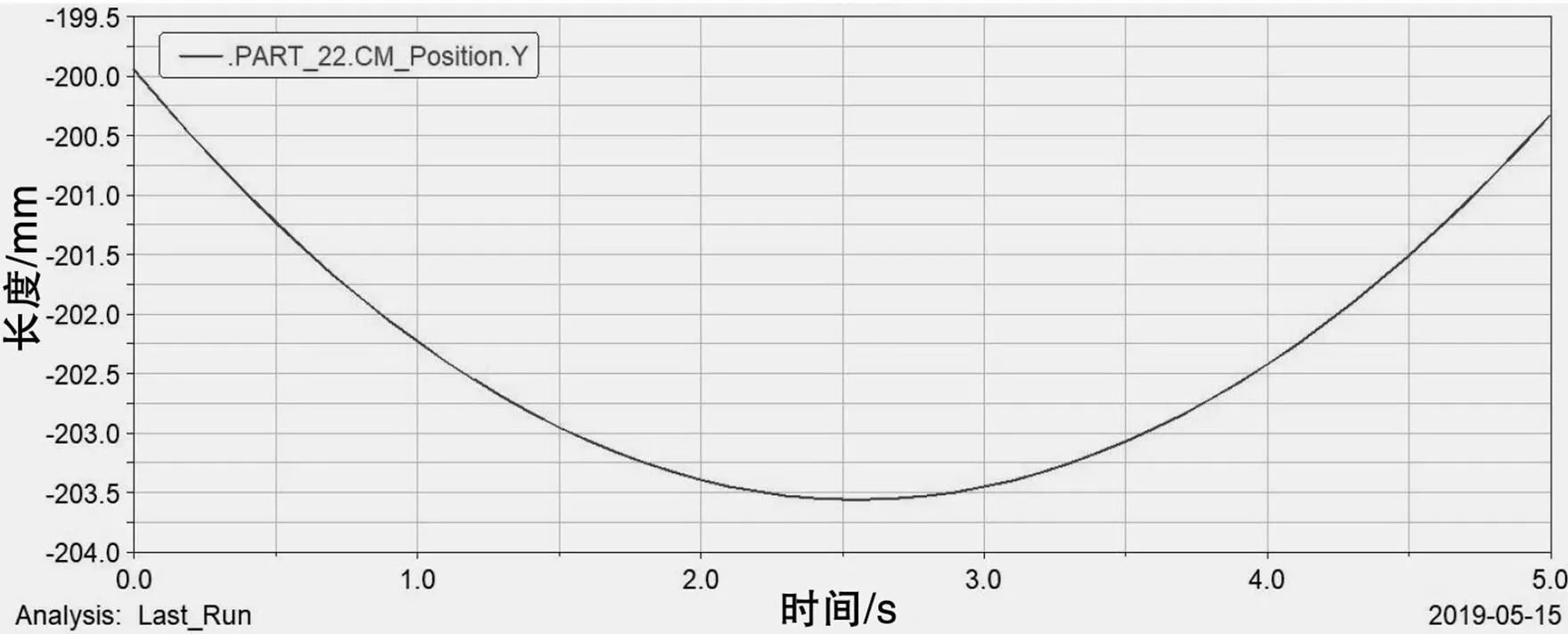
图2 扑翼动作分析
2.1 信息采集和预处理
在扑翼机的机翼两侧安装加速度计,质心位置安装陀螺仪,用于检测扑翼飞行器的运动参数。以单曲柄双摇杆扑动机构为研究对象,优化了驱动机构在一个周期内运动的加速度、角速度和扑翼角的不对称性,同时采用双连杆数字舵机来控制扑翼机在俯仰、偏航和滚转时的飞行姿态。
预处理中采用微电控制器,即单片机的升级版DSP器件,包含加速度计和陀螺仪在内的传感器,它的体积小、质量轻、价格便宜,使用方便,控制相对较容易,使信息处理趋于数字化、微型化、智能化。
2.2 自稳控制系统模型
扑翼飞行器的自稳控制系统模型是基于自主反馈原理建立的。
反馈系统结构流程如图3所示,为了提高控制精度,在控制系统中增加了与干扰有关的修正函数(),其中1()和3()为舵机信号输入,2()为电机驱动输入,1(),1(),1(),1()分别为其对应的前向通道的传递函数、象函数、偏差象函数、反馈通道传递函数。

图3 反馈系统结构流程图
用微积分方程和差分方程来描述该系统的运动,按照经典控制理论逆序分析,系统响应只取决于输入信号的形态和系统的特性,而与输入施加的时间无关,即消除了包括采样时间等在内的累积误差。当系统在外力作用下,输出结果逐渐与期望值一致,则系统稳定,可以按照工程上常用的“快准稳”指标方法进行系统的评价,但是由于同一个系统的快、准、稳的要求有一定的制约,只能不断进行优化,况且飞行无小事,任何纰漏都可能会造成不可预料的损失,所以系统对快、准、稳的要求应该相当重视,达到足够好的动态特性。
单个传感器数据采集完毕后,将多个传感器采集到的数据按照一定级别进行处理,将加速计和陀螺仪结合,产生新的信息形式,在很大限度上减小其他因素(如机械振动、测量时间、温度等)造成的不必要误差,具体分析如下。
对两个加速计采用滤波算法除去短时性快速变化的信号,保留长时性缓慢变化的信号,运用低通滤波算法。通常给变化较快的信号乘上一个较小的权重系数1=2,以削弱突变信号对整体产生的影响。应用高通滤波方法处理陀螺仪数据,辅以权重比例系数3,一方面抑制陀螺仪积分的漂移;另一方面将两部分组成互补滤波器,进一步优化。其滤波系数和为1+3=1,所以得到的滤波结果是一个较精确的线性角度值。

对于尾部小舵机部分,两个舵机分别控制飞行的俯仰、横滚等姿态,在较短时间内输出转动角度,则有:
参数积分关系如图4所示。

该模型主要是将扑翼机的复杂运动以比率和微积分的形式简化,结合线性定常系统的特点,综合多个传感器的同步并行测试,进行线性叠加处理,使其结果转化为线性微分方程的控制运算。以正向研究为主,将辅助反馈作为反向通道,进行稳定性的控制,调整参数变量,将各个模拟的数据导入运算中,得到初始参数的具体值,以量变为主,逐步逼近优化结果,直至达到预定允许范围的值。
图4 参数积分关系
3 Simulink仿真研究
3.1 系统模型建立
用建模仿真软件matlab/simulink快速进行参数化的建模与数据分析,极大地简化了复杂信号的处理,在给定参数条件下,仿真出运行结果的真实状况。根据扑翼飞行的仿生条件,导出机架安装角与扑翼扑动幅角、曲柄驱动参数的运动方程,利用matlab进行求解计算,从而确定驱动机构各杆长的最优设计,对数据进行有效处理,产生可控性高、可视化效果好的信号输出。
建立和调用matlab中工具箱的Flight Simulation Model模块,专门对扑翼飞行器飞行任务和状态进行模型的建立和数据的分析,如图5所示。
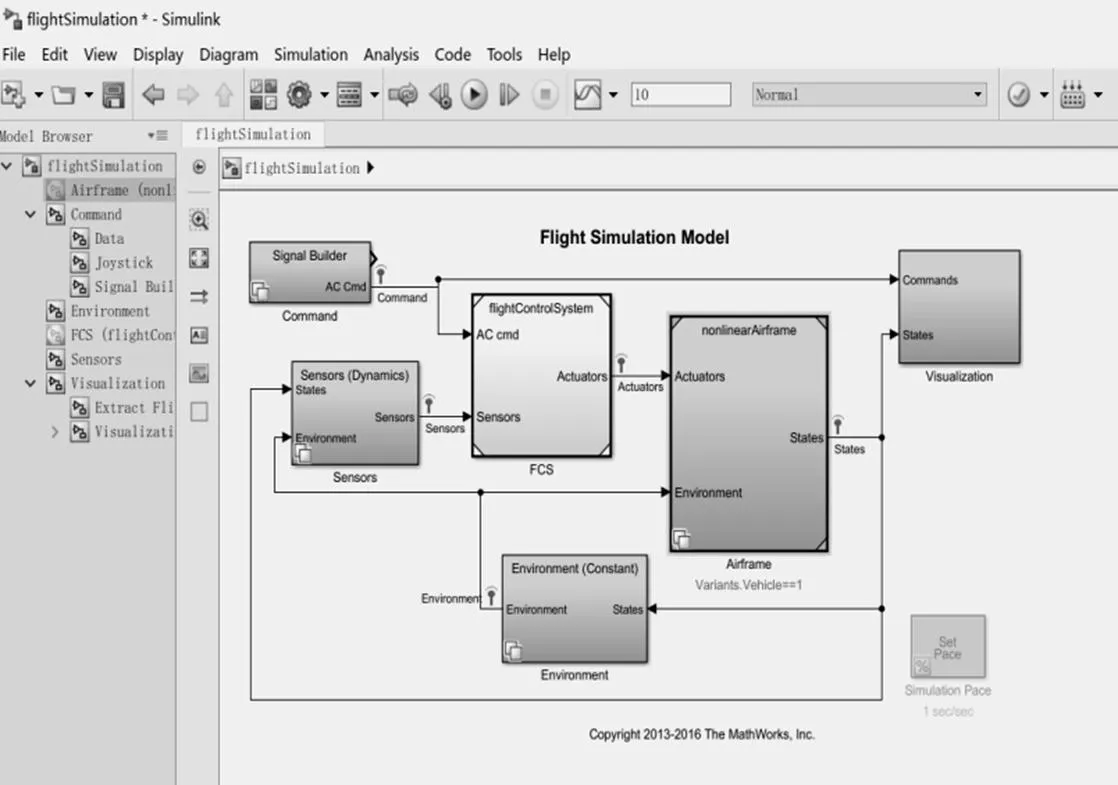
图5 matlab 系统模型
对各个模块元件(比如陀螺仪、加速计、地磁感应、气压传感器、超声波传感器、光流传感器、GPS模块)分别分析数据结构,建立完整控制流程,最终达到并实现整个过程的自动化、智能化。
3.2 参数化设计与仿真处理
由大量的数据仿真分析和模型的规则细化,演绎类比气动力学相关公式,可以推理得出模型的速度公式,即飞行过程中的理论速度检验公式:

式(1)中:f,f,q,,d分别为综合阻力系数、无刷电机驱动力(主动力)、伺服电机(舵机)驱动力、等效扑动迎风面积、空气阻力系数。
当输入的单轴加速度为以特定频率震荡的线性规律变化时,利用matlab/simulink实现的部分仿真分析(理想状况下)相应的变化响应曲线,如图6所示。

图6 变化响应曲线
4 结束语
随着无人飞行器的迅猛发展,对飞行器控制算法的要求越来越高,目前仍有欠缺的控制算法无法解决在扰动影响的情况下,飞行器姿态稳定性控制系统的多参数优化控制问题。本文以单曲柄双摇杆扑动机构为研究对象,在保证驱动机构优化的前提下,进行自稳性飞控系统模型的建立和研究,系统总体将传入的三轴数据进行高通滤波分析和稳态处理,消除多种干扰和噪声,将模型进行最大限度的简化,使用自动控制PID调节,将比例、积分和微分环节与速度,角速度,角加速度和角度融入其中,减少了稳态误差和超调趋势,效果良好。
[1]徐兵,朱伟平.基于四杆机构的扑翼驱动机构设计和运动仿真[J].重庆科技学院学报(自然科学版),2017,19(5):63-66.
[2]修星晨,朱洪俊,谢铎,等.基于MATLAB与ADAMS对扑翼机构优化仿真分析[J].机械设计与制造,2017(Suppl 1):153-156.
[3]贺威,丁施强,孙长银.扑翼飞行器的建模与控制研究进展[J].自动化学报,2017,43(5):685-696.
[4]雷亚超.仿蝴蝶微型扑翼机飞行原理及扑翼机构研究[D].南昌:南昌航空大学,2013.
[5]谢友增.仿生驱鸟扑翼机结构设计及气动力分析[D].天津:中国民航大学,2015.
2095-6835(2019)22-0042-03
V267
A
10.15913/j.cnki.kjycx.2019.22.011
王唱(1997—),男,本科在读,主要研究方向为机器人。赵华(1983—),女,讲师,主要研究方向为产品设计。
辽宁省大学生创新创业训练项目(编号:110418192)
〔编辑:张思楠〕
