基于红外感知技术的电线电缆检测机器人研究
2019-12-04蒋炜华姚景昆
蒋炜华 姚景昆

摘要:针对当前电缆检测难度大、人工检测效率低的特点,本文提出基于红外感知机器人的研究,并分别对机器人本体部分、控制部分以及抗干扰部分提出研究方案及对策。经现场测试,设计的蛇形机器人能够满足当前电缆安全检测的需要,有较大的实用价值。
关键词:红外;电线电缆;检测
中图分类号:TP39 文献标识码:A 文章编号:1007-9416(2019)08-0064-02
1 研究背景
随着信息化社会的建设与发展,电力电缆供电网络也得到快速发展,规模庞大的地下供电网络,电缆分布众多,如何在发展的同时对电缆进行安全检查是保障电网工作可靠的前提。当前我国电线电缆检修主要以人工检查为主,由于线路检测不方便,且存在各种特殊情况,所以极易引发安全事故。同时,人工检测效率过于低下,不能满足日常检修工作量要求,甚至对于一些狭窄区域或者深埋地下的电缆无法进行有效检测,这也导致了在出现故障时无法第一时间检测。
上世纪60年代以法国、日本为代表的一些国家开始进行较复杂工程任务的高效能管道机器人研究,并取得了一定的成果。但國外检测机器人价格昂贵,且电缆沟实际情况与我国并不相同,不适用于我国的实际使用环境。同时,由于国内管道机器人研究时间较短,在精确性、稳定性、适应性等方面还存在很大的差距。
2 方案设计
本设计为能在60mm×60mm的电缆沟内行驶的电线电缆故障预警检测蛇形机器人设计,由于蛇形机器人模拟自然界蛇的无肢结构且具有多自由度、多冗余自由度的特点可以适应复杂多变的环境。在机器人头部,安装有红外检测仪,同时可以安装其他装置,在进入预检测区域之后,该机器人会将头部抬起,并可360度旋转,以便更好地检测地下电缆的问题。
2.1 机械本体部分设计
根据现场情况及设计目标,结合机器人的功能需求将机器人机械本体部分分为两大部分:前端检测部分和主体部分。
(1)前端监测部分:前端监测部分和主体部分以转动关节联接,通过电机控制与主体部分的相对旋转。工作时,前端监测部分抬高90度,使得安装在前端监测部分的设备能够监测到相关信号;在需要穿过防火墙孔洞时,控制电机使得前端监测部分与主体部分保持直线,以顺利穿越。
(2)主体部分:将主体部分分为上下两层,上下两层之间的相对位置可以相互调节。主体部分实现驱动、转弯、以及为整个装置提供动力源等功能。正常工作时,下层在沟内行走,上层在沟外侧起辅助平衡作用;需要转弯时,下层向上提升,上下两层合并成一个整体,由上层驱动转弯,以实现沟道外转弯;需要穿越防火墙孔洞时,上层位于沟道外侧的轮子缩回体内,上层下沉,上下层合并为一个整体,整个机器人呈现细长的蛇形,完成孔洞穿越。
完成各部分运动的机构设计方案如下:
1)行走机构:机器人正常工作时在电缆沟内行走,采用后轮驱动方式进行。在沟槽内行驶时,通过该电机驱动和减速器作用,实现机身的运动。
2)转向机构:当机器人需要转弯时,由于沟道限制,必须在沟道外转弯,否则会卡死,因此必须有能够在沟道外部行走的辅助沟道转弯的辅助转弯机构。该转向机构安装在上半车身。
3)高度调节机构:机器人在转弯时,本体部分必须在电缆沟外,否则转弯时必定卡死。该机构在工作时,负责将机器人本体抬升到电缆沟与周围地面平齐位置。在转弯后,能够让机器人本体在沟道内继续行走。
4)辅助轮收缩机构:机器人在穿越防火墙60mm×60mm的孔洞时,主体部分上下层高度调节,上层下沉,同时上层的轮子收缩回机器人体内,完成穿越。
5)前端抬升机构:机器人在正常工作时,前端部分需要抬起60-70mm的高度,以便红外探测仪采集信号;但在机器人穿越防火墙孔洞时,则要求前端部分与本体部分保持一条直线,以便顺利完成穿越。如图1所示。
2.2 控制部分设计
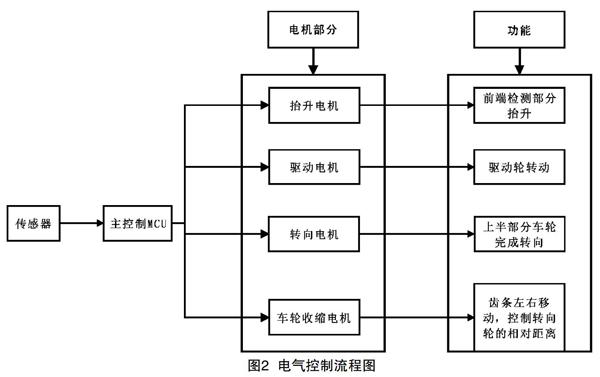
机器人的控制系统采用了模块化设计,由电机驱动模块、传感器模块、SD卡记忆模块等多个模块共同组成。机器人在运动过程中,传感器检测到弯道或者防火墙时,信息会发送至主控制器MCU然后在通过输入输出端口控制电机,使得机器人做出相应的调整。在完成该项操作时,能够恢复原有的运动状态。其控制流程图如图2所示。
(1)电机驱动模块。采用LD1117三端稳压器及MIC5207电源模块,分别对MCU进行供电,以保证主控制电的稳定性。同时加入了自恢复保险丝和反接二极管,充分保护MCU。
(2)传感器模块。当热释电红外传感器收到红外辐射源的照射时,其内部敏感材料的温度将升高,极化强度减弱,表面电荷减少,形成热释电电荷。由于热释电电荷经电路转变成的输出电压也同样可以反映出材料温度的变化,从而探测出红外辐射能量的变化。
(3)SD卡记忆模块。该机器人预期使用控制内置系统内置FLASH ROM存储芯片,以便能随时记录采集来的数据,方便对电缆的情况进行随时汇报。
2.3 抗干扰设计
对于现场的干扰可以通过屏蔽的方法加以抑制,本设计主要针对电场干扰,电磁场干扰进行抗干扰处理。
(1)电场屏蔽。使用接地的金属体包裹控制板,金属体可以是很薄的金属箔,屏蔽体对地直接接地。采用盒形和全封闭的屏蔽体。
(2)电磁场屏蔽。电磁场屏蔽是靠对电磁波的反射和吸收来完成的,屏蔽效果与屏蔽体的厚度无关。选择屏蔽体材料的原则是:当干扰电磁场的频率较高时,利用低电阻率的金属材料中产生的涡流形成抵消作用;当干扰电磁波的频率较低时,要采用高导磁率的材料,从而使磁力线限制在屏蔽体内部,防止扩散到屏蔽的空间去;在某些场合下,如果要求对高频和低频电磁场都具有良好的屏蔽效果时,往往采用不同的金属材料和磁材料组成多层屏蔽体。
(3)通信方式。采用NBIoT的通信方式,通信覆盖增强,通信频率在800KHz左右,带宽较窄,所以受干扰相对较小。并且在天线处采用滤波器,防雷击浪涌处理。
3 项目创新点
本设计的蛇形机器人,在其前端安装有红外热像仪,工作时将前半段抬升,使得热像仪和上方的电缆近距离接触,以达到检测其温度的效果。其后半部分是驱动部分,分为上下两个部分,且这两部分的相对高度可以自由调节,其收缩时可通过防火墙下的孔洞。在通过弯道时,电缆沟容易把机器人卡死,无法转弯,因此,该机器人可以通过上下部分的高度调节来实现沟外转弯。经现场测试,设计的蛇形机器人能够满足当前电缆安全检测的需要,有较大的实用价值,创新点如下:
(1)蛇形機器结构的设计:目前市场上没有可检测电缆温度的机器人,与现有的检测机器人相比,蛇形设计可以灵活穿越防火墙,实现横向和纵向尺寸调节。
(2)机身自身高度的调节:因为电缆沟内部环境的局限性,机身通过上下伸缩的机构,可自行调节机身的高度,以便于更加安全的实现转弯和穿越防火墙。
(3)机身两侧的车轮伸缩调节:利用齿轮齿条进行横向的伸缩,来调节机身的宽度,以便出穿越防火墙孔洞。
参考文献
[1] 章程.蛇形微型探测器探究[J].机电信息,2018(9):43-45.
[2] 连海山,禤景文,陈妙妹.六自由度蛇形机器人设计与控制系统开发[J].岭南师范学院学报,2017(12):63-69.
Research on Wire and Cable Detection Robot Based on Infrared Sensing Technology
JIANG Wei-hua,YAO Jing-kun
(Henan Institute of Technology,Henan Xinxiang 453003)
Abstract:In view of the difficulty of cable detection and the low efficiency of manual detection, this paper puts forward the research based on infrared sensing robot, and puts forward the research plan and Countermeasures for the robot body, control part and anti-interference part respectively. Through field test, the designed snake-like robot can meet the needs of current cable safety detection, and has great practical value.
Key words:infrared; wire and cable;detection
