基于VI-SLAM的四翼无人机多目标视觉定位技术
2019-12-02
(清华大学天津电子信息研究院,天津 300467)
0 引言
无人机在侦查、监控、搜救等领域都有着广泛的应用前景,相比较其它无人机,四旋翼无人机具备垂直起降、灵活性高、可以保持低速飞行的优点,因此成为当前研究的热点课题。目前人们对四旋翼无人机提出了更高的要求,指出无人机要向更加智能、更加实用的方向发展,若想达到这一要求必须要实现全自主飞行,无人机要具备自主定位的能力[1]。对于控制无人机自主飞行这一问题上,传感器和处理器发挥着重要作用,无人机需要利用传感器和处理器来估计位姿,构建环境地图。早期使用的雷达为激光雷达,但是激光雷达成本过高、体积过大,随着分析的深入,科学家发现摄像机具备重量轻、功耗低等优点,可以很好地取代激光雷达识别图像几何结构,在执行更高级别的任务时,无人机还需要引入视觉信息技术[2]。
SLAM指的是一种新的紧耦合视觉惯导即时定位与地图重建系统,该系统能够利用地图实现闭环,从而有效减少由于定位产生的漂移误差,当前SLAM还加入了闭环检测线程技术,确保无人机可以实现闭环检测和重定位,该系统具有很好的稳健性,且定位精准度高[3]。虽然SLAM具备上述优点,但是该系统仅能构建稀疏特征地图,在优化方面计算量过大。
本文基于VI-SLAM系统设计了一种新的四旋翼无人机多目标视觉定位技术,加入立体摄像机进行地图重构,通过四旋翼自主飞行平台实现精准定位。该方法通过多个标定相机进行标定,利用软触发同步采集图像,同时加入背景差分、连通域分析、冲投影等技术进行自动检测和定位。
1 基于VI-SLAM的四翼无人机多目标视觉定位技术原理
通过空对地定位技术求取地面目标所在的三维坐标,借助机载光电测量平台、北斗卫星导航系统和无人机空中姿态测量系统实现多目标视觉定位[4]。基于VI-SLAM的四翼无人机多目标视觉定位技术的工作原理如图1所示。
分析图1可知,在进行定位时,导航定位系统、航空姿态测量系统、机载光电测量平台共同工作,从而降低误差,确保无人机可以实现自主定位。当无人机接收到定位命令后,机载光电平台内部的摄像机就开始主动搜索地面的目标,在相机市场中心内部锁定目标,锁定目标后,航定位系统和航空姿态测量系统会对检测实时数据,借助无人机获得目标的三维坐标、三姿态角,处理出数据后,将空中坐标转换成大地坐标,建立几何模型,从而得到精准的大地坐标值[5]。
2 基于VI-SLAM的四翼无人机多目标视觉定位技术
2.1 多目标相机标定
机载光电测量平台在进行标定时,需要确定内方位元素、畸变参数、外方位元素,通过控制场检测得到内方位元素和畸变参数,利用辅助标志点过渡法获取外方位元素[6]。在相机外壳上标定8个控制点,如图2所示,根据这8个标志点建立一个局部坐标系,在该局部坐标系中确定出相机中心所在位置,相机在局部坐标系中所在位置保持不变,相机对应的主光轴朝向始终冲着一个方向。
根据标识点设计矩阵,在矩阵内部标定多目标所在的各个位置[7]。
摄像机在锁定目标后,拍摄目标图像,对图像进行背景差分,寻找图像序列的当前帧和背景帧,设定参考模型,检测目标的运动速度,使用背景差分检测目标时,即使目标的行驶速度很快,也能够实现精准检测。相机采集影像的第一张图片被设定成初始背景图,利用该初始背景图建立高斯函数模型,分析权值变化,改变函数的灰度值,确保背景图像的灰度值满足高斯分布,对比所得图片的灰度值与背景灰度值的差异,分析检测概率。在这种条件下,即使相机采集到的初始背景存在无人机,也不会影响后续的定位工作进行[8]。背景差分法锁定的目标图像经过处理得到差分二值图,对比图如图3所示。
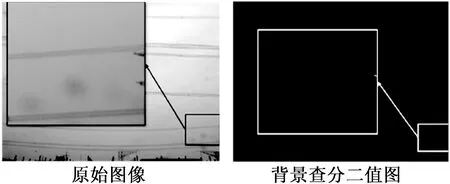
图3 锁定目标背景差分结果示意图
2.2 基于VI-SLAM的四翼无人机多目标视觉定位与筛选
确定机载目标位置后,建立坐标系,分析航拍图像像点在坐标系上的位置,将摄像机坐标系转换成载机机体坐标系,明确载机机体坐标系与大地坐标系之间的关系,然后再将载机机体坐标系转换成大地坐标系,实现坐标系的转换问题。得到的大地坐标系如图4所示。
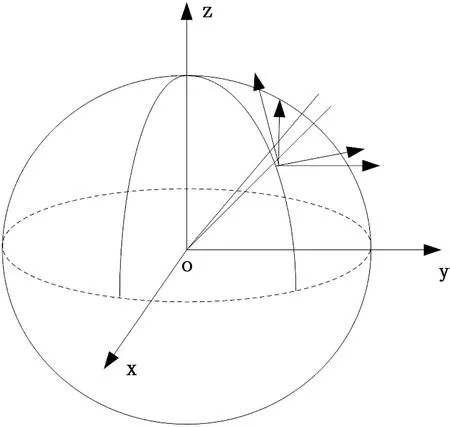
图4 大地坐标系示意图
通过上述转换过程确定大地坐标系,从而确定出目标在大地坐标系中的坐标。为了使得到的定位结果更加准确,建立几何关系模型,对主目标和次目标之间的几何关系进行分析,通过计算分析确定次目标像点在摄像机坐标系下的三维坐标,根据坐标转换法对次目标的大地坐标进行计算[9]。多目标几何定位图形如图5所示。
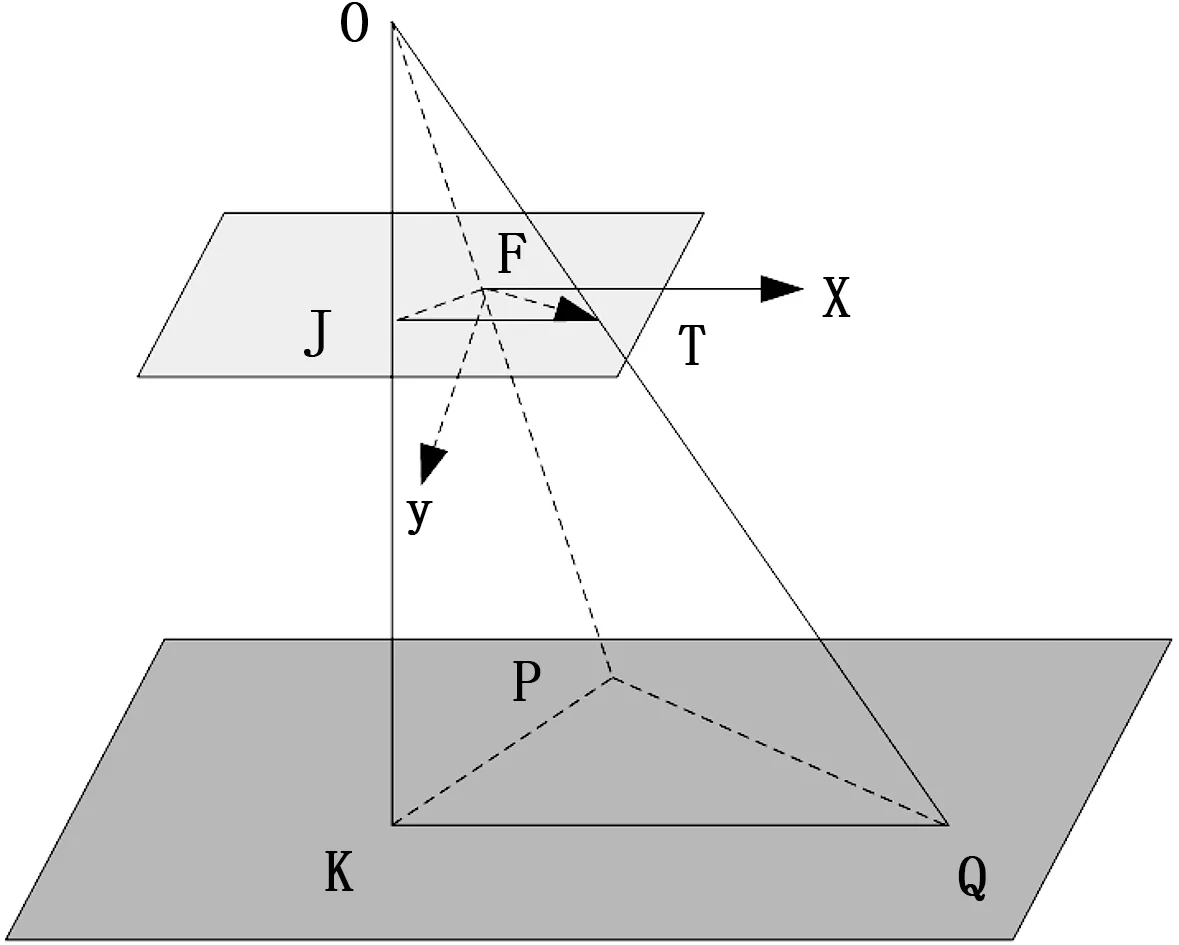
图5 多目标几何定位模型
在四旋翼无人机上,通过激光测距仪分析光电平台与主目标、次目标之间的距离,四旋翼无人机光电平台如下图6所示。图中,P代表主目标,Q代表次目标,无人机多目标几何定位模型主要是由无人机、主目标、次目标组成,根据映射原理,得到沿无人机摄像机的摄像向量的投影,判断向量与向量之间的夹角。
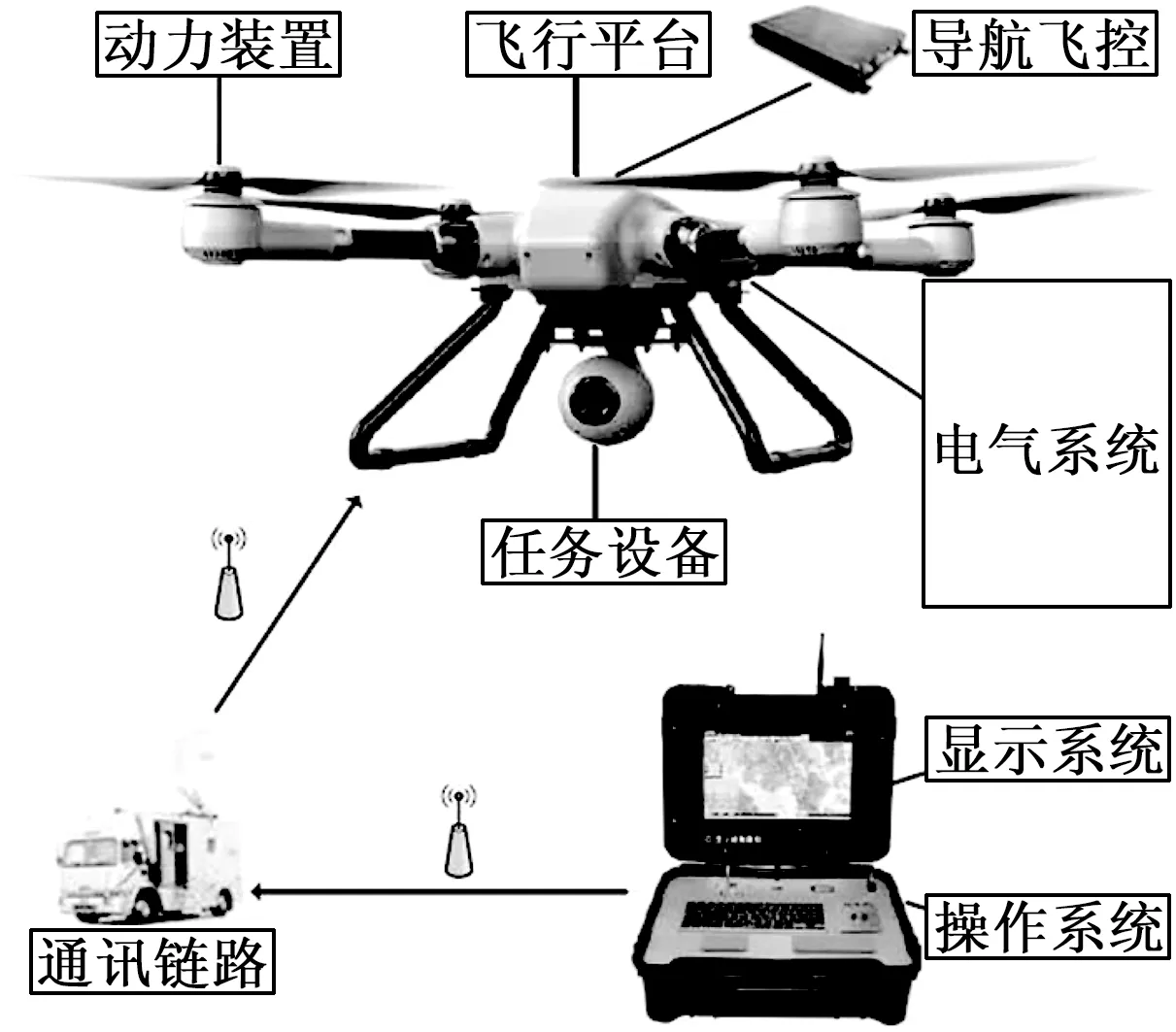
图6 四旋翼无人机光电平台
调节摄像机的焦距,在四旋翼无人机上得到主目标和次目标在载机地理坐标系上的坐标点,判断坐标系之间的夹角。将主目标和次目标在载机地理坐标系上的坐标点代入到映射函数关系式中,通过分析主目标到光电平台之间的距离、次目标到光电平台之间的距离、平台与目标之间的相对关系,得到目标在摄像机坐标系的相对位置[10]。主目标和此目标在进行定位时的坐标转换过程如图7所示。
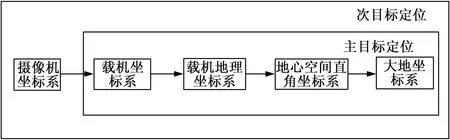
图7 坐标转换过程
根据上述分析可知,通过主次目标的几何关系确定主次目标在摄像机坐标系中的坐标点,利用映射关系得到多目标在大地坐标系的坐标点。
3 基于VI-SLAM的四翼无人机多目标视觉厘米级定位精度实现
通过转换坐标系定位的目标坐标值并非准确坐标值,必须要分析定位结果的精度,实现厘米级精准定位。在基于VI-SLAM的四翼无人机多目标定位技术中,多目标的定位精度是最重要的指标,是定位技术的重要环节。造成目标定位误差的主要原因有如下几种:(1)无人机在空中定位时产生的误差;(2)无人机在定位姿态角时产生的误差;(3)无人机激光测距仪测距过程产生的误差。通过卫星导航系统改善无人机定位产生的误差,目前主要是应用全球导航系统,即GPS系统实现误差改善,但是由于GPS为国外系统,所以本文定位精度实现引用的系统为我国研发的北斗卫星导航系统。相较于GPS系统,北斗卫星导航系统多加入了3颗中轨道卫星,分别在倾角为55°的3个平面上,多颗卫星同步工作使北斗卫星导航系统具备更强的通信能力。
三频北斗导航信号具有很强的定位能力,可以实现厘米级多目标精度定位,三频北斗导航信号中的加密信号需要确定得到授权后才可以使用。在经过一段时间的测量后,三频北斗导航信号可以测得载波相位整周模糊度的初始值,这种求值算法的准确度更高,与真实值更加接近,并缩小整周模糊度的搜索空间,使求解时间更短,求解效率更高。
通过最小二乘算法降低最小误差,最小二乘算法通过计算最小化误差的平方,得到新的数据,寻找数据最佳匹配方法。最小二乘法的计算过程简单,在处理误差值后,数据会更加趋近真实值。本文使用的算法为递归最小二乘算法,该算法能够很好地处理滤波,提高目标的定位准确性。递归最小二乘算法的定位误差均在期望误差范围之内,比较主目标和次目标之间的定位误差,可以发现主目标的定位误差会小于次目标的定位误差,次目标的定位误差与主目标定位误差相差较大,造成这种现象的原因有如下几个:(1)无人机光电平台与各个目标之间存在的斜距不同,二者之间斜距越大,定位时得到的误差就越大;(2)多个坐标转换时,有可能因为转换不准确而产生误差;(3)图像在不同的流程中,有可能出现畸变,这种畸变也很容易引起坐标误差。引入递归最小滤波处理方法处理误差滤波,能够大大减小定位误差。
4 实验研究
4.1 实验目的
为了进一步研究本文基于VI-SLAM的四旋翼无人机提出了一种新的多目标视觉定位技术的实际效果,与传统定位技术进行对比,设置了验证实验。分别使用“北斗二代”卫星和蒙特卡洛法对传统技术和本文技术的定位误差进行检测。
4.2 实验参数与实验环境设计
设置实验参数如表1。
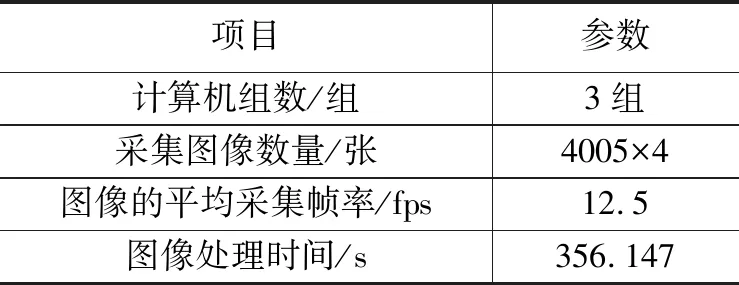
表1 实验参数
4.3 实验过程与结果分析
4.3.1 北斗二代星座误差检测实验
北斗卫星的载波相位观测值测量精度很高,可以精确到±11 mm,因此用来检测目标精度的定位误差具有很高的实用性。北斗MEO卫星示意图如图8所示。
图8 北斗MEO卫星示意图
无人机与地面之间的相对高度为1 500 m,设定的无人机经度为122.668 826°,纬度为52.142 185°。将航拍图像数据设定成实验对象,在这一时刻,无人机内部的光电平台俯仰轴在水平方向的角度为0°,垂直向下的方向为-90°,检测传统技术和本文技术的测量精度,得到的定位误差结果如图9所示。
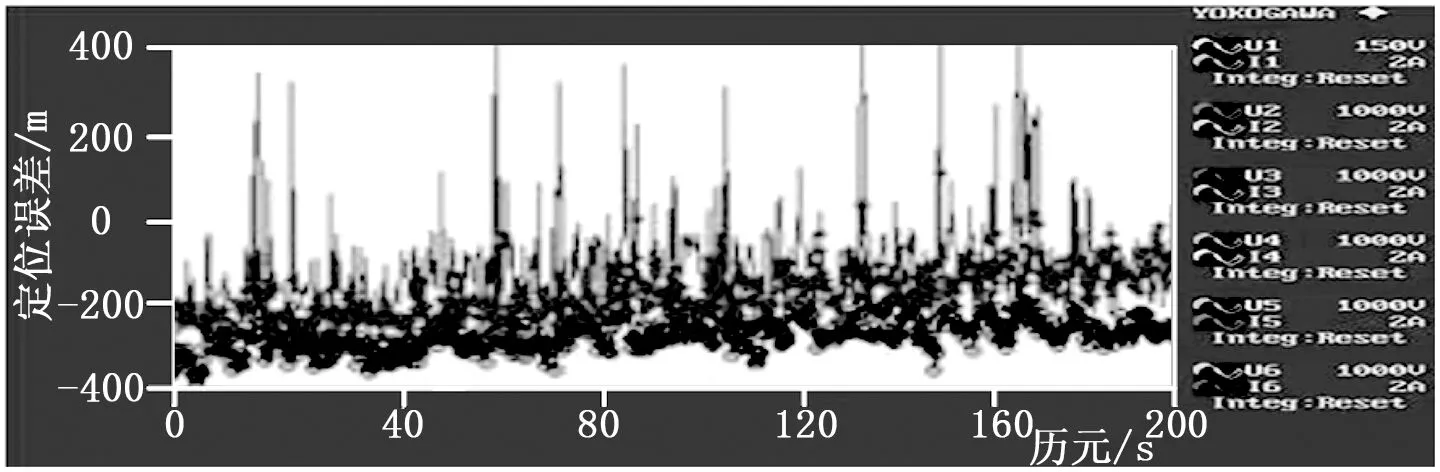
图9 北斗卫星检测传统技术定位误差结果
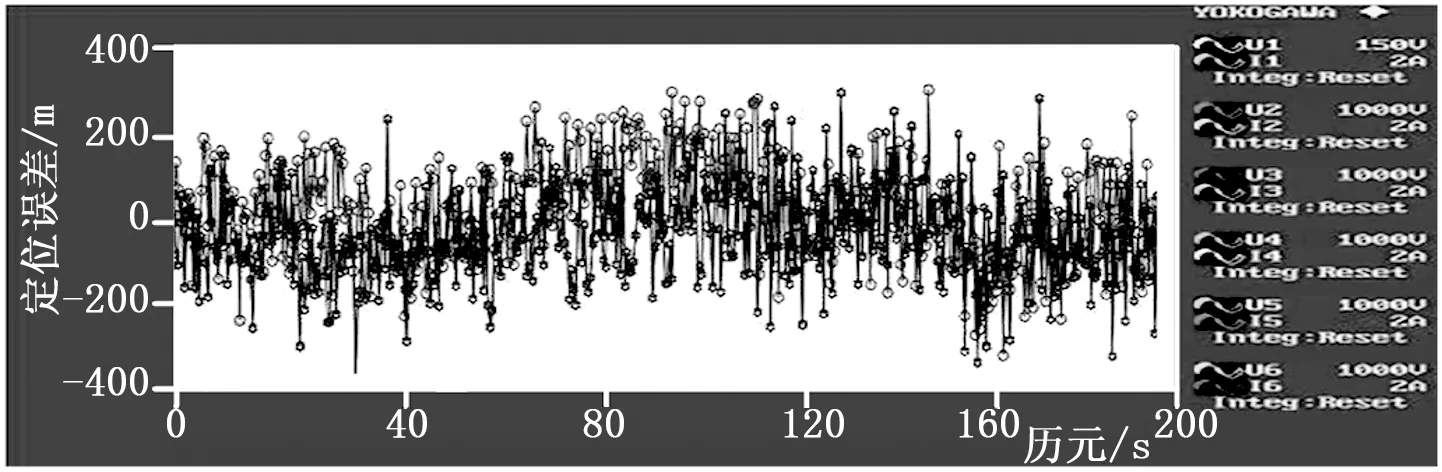
图10 北斗卫星检测本文技术定位误差结果
对比上图定位误差结果可知,在使用传统技术对多目标进行视觉定位时,高低角和方位角都会产生很大的测量误差,高低角的测量误差为0.8 mrad,方位角的测量误差为1.25 mrad,无人机内部的激光平台激光测距精度为15 m。在使用本文研究的基于VI-SLAM的四旋翼无人机的多目标视觉定位技术进行定位时,虽然也会产生一定的测量误差,但是测量误差大大减小,高低角的测量误差为0.25 mrad,方位角的测量误差为0.37mrad,无人机内部的激光平台激光测距精度为5m。与传统技术相比,本文的定位技术显现出极大的优势。
4.3.2 蒙特卡洛法误差检测实验
蒙特卡洛法是根据计算结果来检验误差大小的方法,该方法会对大量数据进行计算,以随机模拟的方式,分析数据的概率,主要利用的技术为随机抽样技术。根据蒙特卡洛法对传统定位技术定位3个目标(1个主目标,2个次目标)误差进行计算,得到的定位误差结果如表2所示。
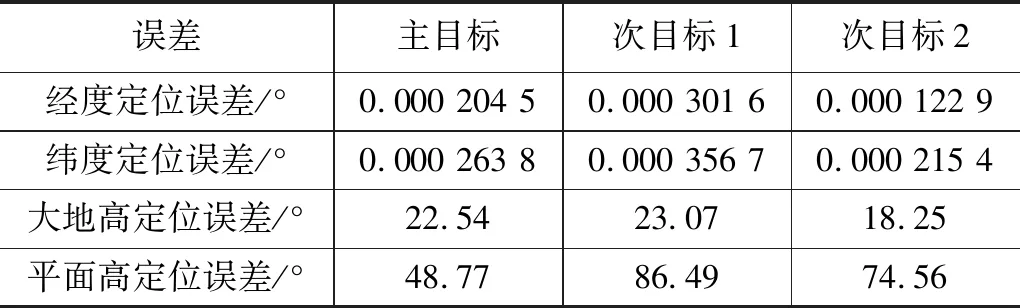
表2 传统技术的多目标定位误差
在完成传统的技术的定位误差计算后,使用蒙特卡洛法对本文研究的技术对相同的3个目标的定位误差进行检测,得到的定位误差结果如表3所示。
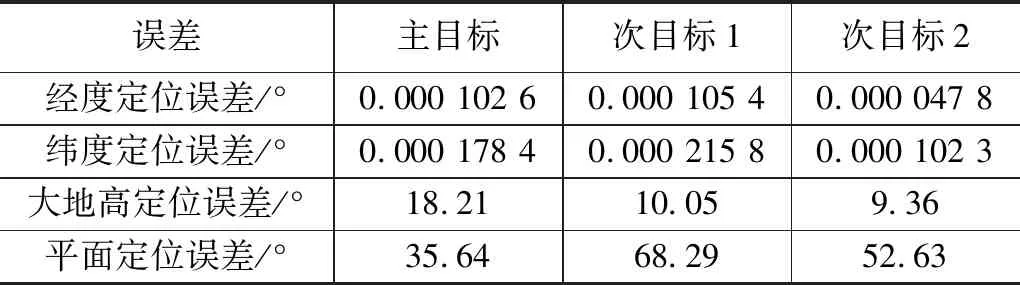
表3 本文技术的多目标定位误差表2本文技术的多目标定位误差
针对上表进行对比分析,可以发现本文研究的定位算法在对主目标、次目标进行定位时,经度定位误差、纬度定位误差、大地高定位误差、平面定位误差都要低于传统定位技术的定位误差。
4.4 实验讨论
本文同时使用了“北斗二代”卫星和蒙特卡洛法检测了传统技术和本文技术的定位效果,两种检测实验结果均表明,本文研究的基于VI-SLAM的四旋翼无人机提出的多目标视觉定位技术在对不同目标进行定位时,精准度要更高。本文眼睛就得方法即使在GPS失效的情况下,也可以很好地对目标进行定位,内部的采集器和传感器紧密配合,有效地处理摄像机采集到的各种数据,通过多个坐标转换,逐步提高定位的精度和稳健性。
5 结束语
本文基于VI-SLAM的四旋翼无人机提出了一种新的多目标视觉定位技术,该技术操作过程简单,无人机内部的激光测距机只需要对主目标进行一次测距,就可以根据摄像机焦距得到目标图像在摄像机坐标系中的坐标值,然后再通过坐标转换,求解出该目标图像在大地上的坐标。通过北斗导航系统对无人机所在的位置进行空中定位,能够有效提高定位的精准性。定位技术使用的算法为递归最小二乘算法,能够达到减少定位过程的误差率,相对于传统算法,递归最小二乘算法的定位精度可以提高10 m左右,基于VI-SLAM的四旋翼无人机提出的多目标视觉定位技术在躲避障碍物、路径规划、导航等领域都可以发挥出关键性的作用。本文研究的定位技术虽然具备上述优点,但是面对复杂地形,该技术仍然显现出很大的局限性,未来要在这一方面进行更加深入的研究。
