三坐标DBF雷达SystemVue仿真建模方法研究
2019-12-02
(陆军工程大学石家庄校区,石家庄 050003)
0 引言
SystemVue仿真软件是Agilent公司近些年大力发展的一款电子系统级仿真工具软件,主要针对于通信、雷达、导航和电子战等领域。它以图符化模块构建理论模型,是一个适用于动态系统分析的仿真平台,能够对系统设计进行数字仿真,完成系统性能的合理分析和仿真评估[1]。它具有与外部文件相通的、开放的算法建模接口,可直接获得并处理输入/输出数据。同时,可以与Matlab、C++、HDL、DSP、FPGA、ADS等软件互联使用。与其它仿真软件相比,SystemVue仿真软件具有明显的优越性,尤其在射频模块方面:支持射频-基带联合仿真;支持数据流仿真;模块齐全,可直接进行搭建。以上这些优点基本满足雷达仿真的需求,在雷达系统仿真方面有很好的应用前景[2-3]。
当今雷达基本上都采用三坐标体制,能为操作员提供空中目标的高度、速度、方位等详细信息。数字波束形成(DBF)技术是新一代雷达实现三坐标所采用的一种先进技术。其实质是对不同来向的信号进行增强和抑制。DBF雷达通过对权值的控制可以完成自适应置零,天线自校正,低副瓣等功能,这些特点大大提高雷达系统的抗干扰能力、分辨力等,因而得到广泛应用。数字波束形成(DBF)技术分为普通数字波束形成和自适应数字波束形成两种,区别在于后者能够自适应地在干扰方向形成“零点”。本文对其中较为先进的自适应数字波束形成基本原理进行介绍,并利用SystemVue软件平台对DBF体制雷达进行建模,最后给出以线性调频脉冲发射信号受到干扰的情况的仿真结果。
1 三坐标搜索雷达空域扫描基本理论
1.1 空域扫描方法
通常三坐标雷达方位扫描采用机械扫描方式,或者机扫加相扫。而仰角覆盖方式有:堆积多波束和电扫描两种。其中电扫描根据实现所用的基本技术的差别,又可分为频率扫描法、相位扫描法、频相扫描法、数字波束形成等[4-6]。
1.2 自适应数字波束形成的基本原理
数字波束形成技术,一般是针对接收阵列天线而言的,利用阵列天线的孔径,通过数字信号处理在期望的方向形成接收波束。数字波束形成技术兼有相扫和堆积多波束体制的特点,其物理意义是:阵列上每个天线的方向图都是全向的,接收来自各个方向的信号,利用数字处理方法,对阵列多个接收通道中某一方向的入射信号进行加权求和处理,补偿由于每根天线空间位置不同引起的传播波程差导致的相位差,实现该方向的最大能量接收,相当于在该方向上形成了一个“波束”。可以通过改变权值,使得波束指向不同的方向,实现波束的扫描。通过多通道并行处理可以同时形成多个波束,还可以选择合适的窗函数来降低副瓣电平。图1是利用数字波束形成技术对n个波束进行自适应数字多波束形成的原理框图[7]。
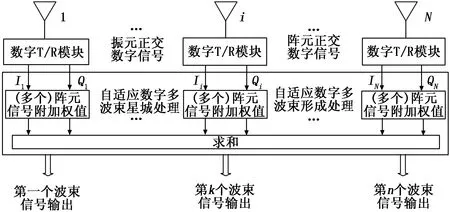
图1 自适应数字多波束形成原理框图
图1中每个阵元接收的射频回波信号送至数字T/R模块的接收通道,经过接收系统相应的处理,输出正交的I/Q数字信号。数字波束形成模块对每一个波束的每个I/Q数字信号分别进行复加权和求和运算处理,形成所要求的波束。
其具体复加权和求和运算用矢量方式表达如下所示:
对于N阵元天线,N个数字T/R模块输出的信号矢量为:
X=[x1…xi…xN]T
(1)
第i个T/R模块输出的复信号xi为:
xi=Ii+jQi
(2)
则第1个、第k个、第n个波束的接收信号的矢量的加权矢量W1、Wk、Wn分别为:
W1= [W11…W1 i…W1N]T(3)
Wk=[Wk 1…Wki…WkN]T
(4)
Wn= [Wn 1…Wn i…WnN]T
(5)
加权后的复信号经过相加、求和之后,便可以得到第1个、第k个、第n个波束的输出函数:
F1(θ) =W1TX
(6)
Fk(θ) =WkTX
(7)
Fn(θ) =WnTX
(8)
|F1(θ)|、|Fk(θ)|、|Fn(θ)|分别是第1、k、n个波束的方向图函数。不同方向的F(θ)模值不同,实现了对方向角θ的选择,即实现了空域滤波[8-9]。
2 三坐标DBF雷达设计相关软件模块
2.1 SystemVue雷达模块
SystemVue是以图符化模块构建理论模型,对电子系统电路的实际工作状态进行虚拟现实地仿真模拟,完成电子线路功能和电路特性的详细分析。其雷达库包括完整的信号源、发射系统、接收系统、天线收发、环境和信号处理等12类模块。模块齐全,功能完善,能够适应雷达系统仿真的绝大部分需求。在这里我们主要研究阵列收发、阵列信号处理这两类模块。
2.2 阵列收发模块
RADAR_Phased Array_Rx是相控阵接收天线模块,利用该模型可以对线性阵列和任意平面阵列接收功能进行仿真。其参数有以下几类:相控阵天线模式、天线坐标轴/轴平面设置、二维阵列形状、阵列天线单元数、阵列天线单元位置分布、可靠性参数、天线坐标中的目标仰角和方位角、天线坐标中波束仰角和方位角、窗口函数设置、移相器设置等。其输入有:从空间接收或上一级传输的射频信号、天线坐标中的目标仰角和方位角参数信号、天线坐标中波束仰角和方位角参数信号。其输出是相控阵天线各接收通道输出的射频信号。
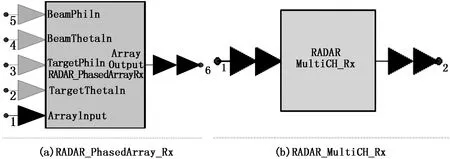
图2 阵列收发仿真模块
RADAR_MultiCH_Rx是多通道接收机模块,利用该模型可以对多通道接收机输入信号从射频到基带的处理过程进行仿真。其参数有:接收机内部本振频率、输出噪声频谱密度、基准相位、I/Q通道的增益/相位不平衡度、通道数目、通道的不平衡系数等。其输入是上一级的射频信号,其输出是正交的I/Q数字信号。
2.3 阵列信号处理模块
RADAR_ADBF,阵列最佳滤波器,该模型根据最优化准则,通过模型内嵌的最佳权向量准则(MMSE、MVDR、MSNR)完成接收信号权系数的求取与更新。其仿真雷达一般为矩形阵列接收天线,ADBF模块的参数有:矩形阵列天线X轴/Y轴中的单元数,X轴/Y轴的天线单元间距,对天线仰角关注的程度,对天线方位角关注的程度,波形基带采样率,估计系数矩阵的样本个数(通常将样本数量设置为信号通道数量的10倍或更多)。ADBF模块的输入有:用于估计权重的输入信号,天线重点关注方向的仰角/方位角。其输出是输入信号的权重。
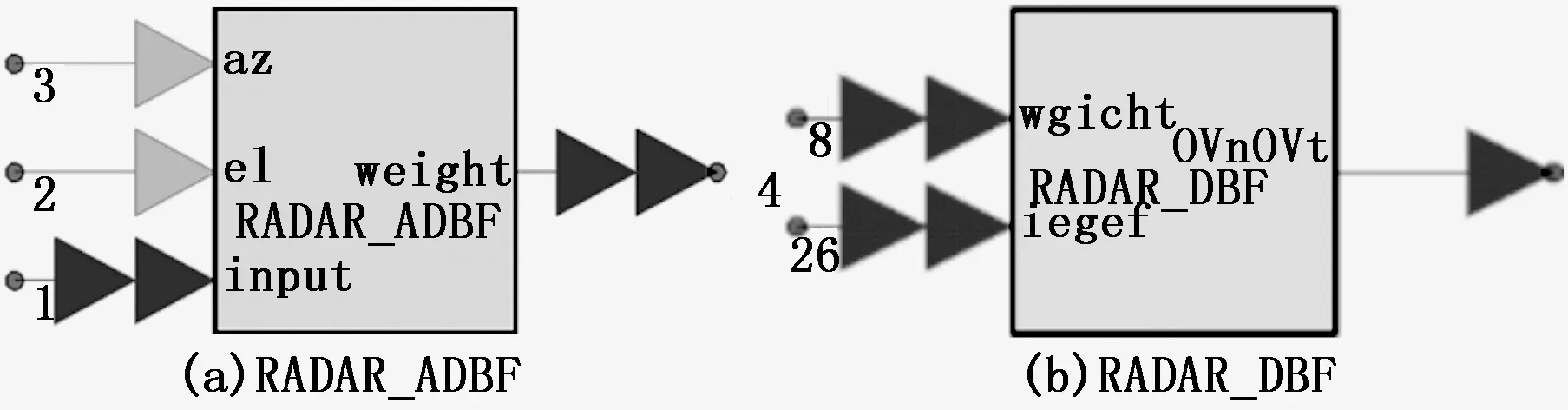
图3 阵列信号处理模块
RADAR_DBF数字波束形成模块,用来完成数字基带信号与权系数的相乘、加权求和运算从而实现数字波束形成。其输入是接收机每个接收通道输出的I/Q数字信号和每个信号的权系数(来自ADBF模块),输出是完成自适应数字波束形成处理后的信号。其功能有:改变波束指向,干扰的自适应消除,提高目标和干扰器的高分辨率角度估计等。
在进行自适应数字波束形成仿真时,RADAR_ADBF模块来估计接收信号的权系数并将权系数输入到RADAR_DBF模块中实现数字波束形成,两者共同完成自适应数字波束形成。
2.4 自适应数字波束形成最佳权向量准则
自适应数字波束形成是在最佳权向量准则下寻求最优权矢量,完成接收信号权系数的求取与更新,SystemVue软件中RADAR_ADBF模块内嵌的算法准则为MMSE、MVDR和MSNR。
2.4.1 最小均方误差准则(MMSE)
MMSE准则是利用参考信号求解权矢量的一种准则,参考信号根据期望信号特性求得。其数学定义是:使未知量与已知量的均方误差达到最小化,在这种条件下来确定所需的未知量。阵列自适应权矢量的求解是使参考信号与阵列加权相加的输出信号之差的均方值最小化。应用该准则的前提寻找输入信号与期望信号的互相关矩阵,计算量大,是一种最优维纳解,多应用于旁瓣相消和自适应均衡。
2.4.2 最小方差无失真响应准则(MVDR)
MVDR是一种基于最大信噪比准则的自适应的空间波数谱估计算法。通过MVDR算法得到的权系数可以使在期望方向上的阵列输出功率最小,同时信噪比最大,有良好的弱信号检测、高分辨力和噪声抑制性能。MVDR算法采用矩阵求逆(SMI)算法,具有较快的收敛速度。该算法存在两个问题:(1)在强干扰存在的情况下,容易产生病态解;(2)在有限次快拍条件下,协方差矩阵估计存在误差,带来一定的信噪比损失。
2.4.3 最大信噪比准则(MSNR)
MSNR准则是在输出信噪比最大的条件下求得最优权矢量,应用该准则需要知道信号自相关矩阵和噪声自相关矩阵,需要的样本数较大,计算量大,是一种最优维纳解。
3 三坐标DBF雷达仿真实现
上文我们对的自适应数字波束形成原理和相关仿真软件模块进行了介绍。在这里我们对DBF体制三坐标雷达进行仿真。
3.1 DBF雷达仿真原理
DBF体制雷达,接收时全向接收各个方向的信号, 将目标信号与环境中的杂波、干扰一同接收,在通过DBF模块自适应权矢量的求解后,判定出目标信号方向和干扰信号方向,用数字方法调整阵列接收的方向增益聚集在目标信号的方向上,并对干扰信号方向进行抑制。该雷达仿真的关键在于对多路接收信号进行自适应数字多波束形成处理。其主要由两部分组成,一部分是阵列最佳滤波器,其功能是根据最佳权向量准则完成权系数的求取与更新;另一部分是数字波束形成模块,其功能是完成数字基带信号的复加权和求和运算,进而得到波束信号[8]。
3.2 仿真场景设置
在DBF雷达坐标30度方向上设置一个信号发射器向DBF雷达发射线性调频脉冲信号(以下简称发射信号),在雷达坐标60度方向上设置有一个干扰器发射干扰信号。发射信号与干扰信号经过一段理想空间传播,到达DBF雷达处,被DBF雷达的相控阵天线一同接收,两者的混合信号进入DBF雷达。
3.3 DBF雷达仿真建模
根据雷达仿真基本原理[10-12],总体仿真框图如图4所示。
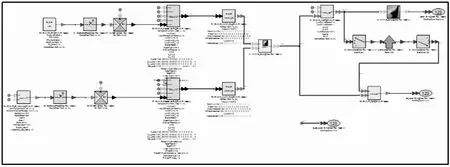
图4 DBF体制三坐标雷达仿真
为了能够清晰地分析整个仿真框图,将其分成几个分块图进行解释说明,分别如图5~8所示。
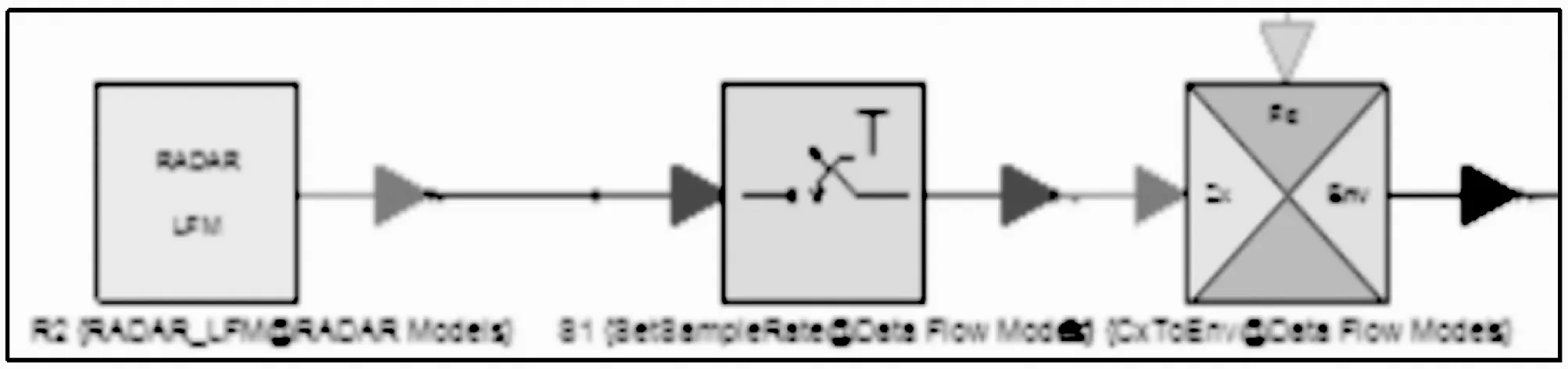
图5 发射信号分块
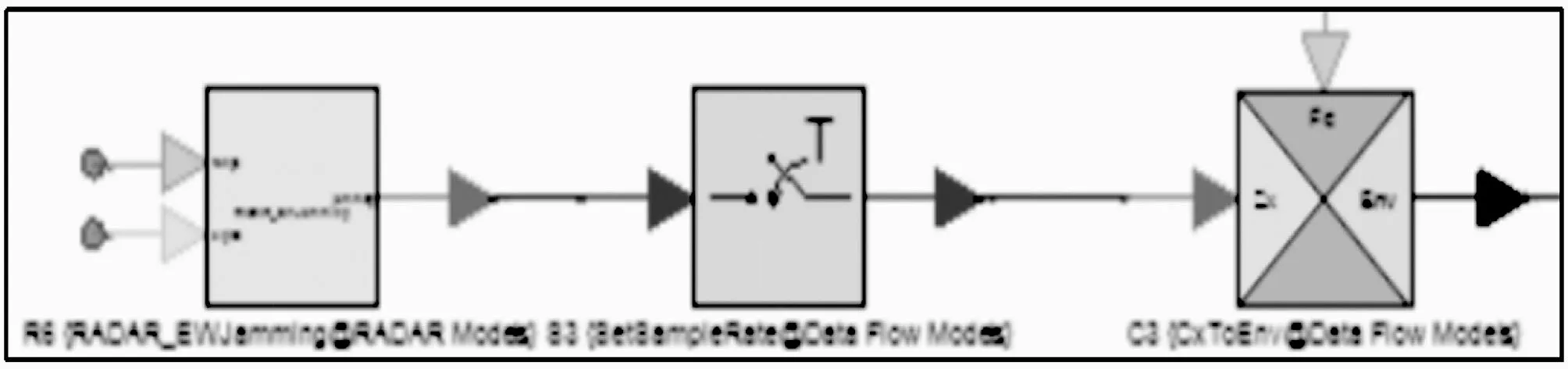
图6 干扰分块
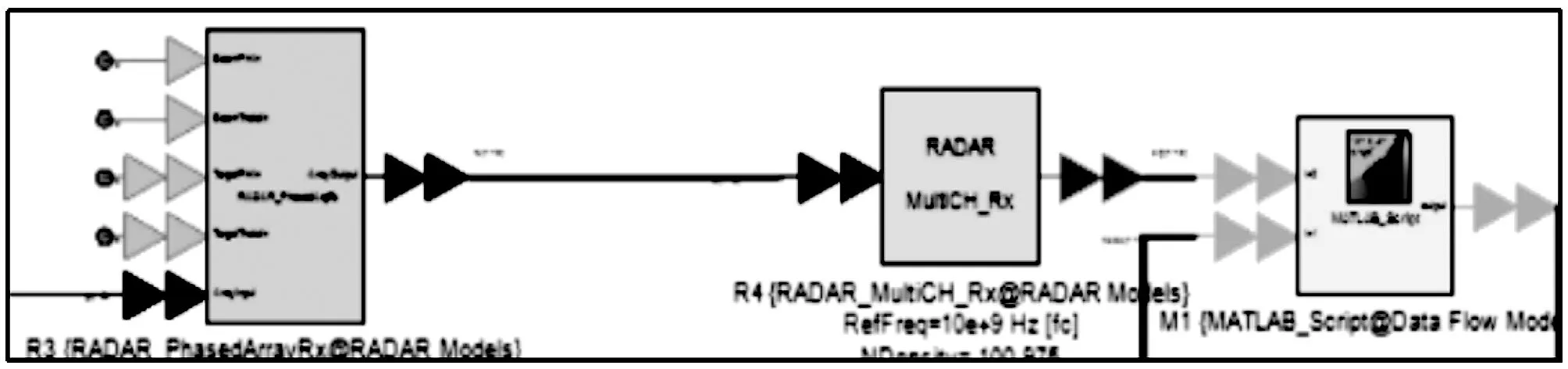
图7 接收分块
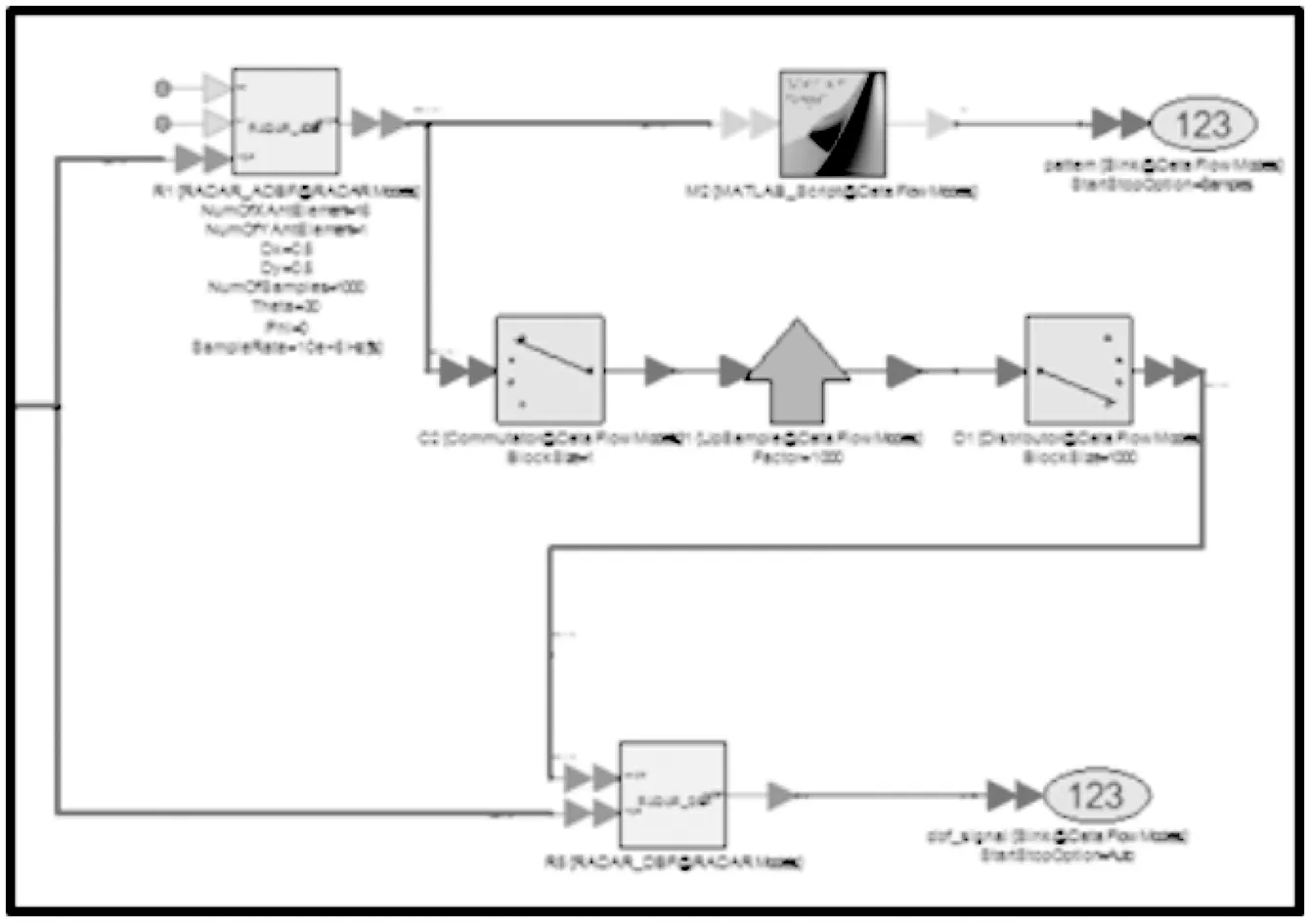
图8 自适应数字多波束形成分块
图5中,Radar_LEM信号源模块产生的线性调频发射信号经Set_Sample_Rate采样模块采样后,送入Cx_To_Env模块进行载波调制,将转换后的复包络信号送入接收分块。图6中RADAR_EWJamming干扰模块产生干扰信号,经Set_Sample_Rate采样模块采样后,送入Cx-To-Env模块进行载波调制,然后送入接收分块。图7为接收分块,在此仿真中有两套接收分块分别接收发射信号和干扰信号,RADAR Phased Array Rx相控阵天线接收模块,接收来到的发射信号(干扰信号),再将接收到的发射信号(干扰信号)送入RADAR_MultiCH_ RX多通道接收机模块处理,自定义编程的MATLAB模块将处理后的发射信号和干扰信号的数字基带信号进行混合相加,然后将混合信号送入自适应数字多波束形成分块。图8中,RADAR-ADBF阵列最佳滤波器模块对混合信号进行处理,通过模型内嵌的最佳权向量准则完成接收信号权系数的求取与更新,并将自适应估计权系数输入到RADAR_DBF模块。RADAR_DBF模块用来完成数字基带信号的复加权和求和运算,从而实现自适应数字多波束形成。
4 仿真结果验证
将以上设计程序在SystemVue仿真平台上运行,得到仿真结果如图9~13所示。图9为发射信号的时域仿真波形(图(a)为多脉冲波形,图(b)为脉冲内线性调频信号波形),图10干扰信号的时域仿真波形,图11为混合信号的时域仿真波形,图12为RADAR-ADBF模块对混合信号处理得到的自适应估计权系数,图13为混合信号经自适应DBF处理后的时域仿真波形(图(a)是处理后多脉冲时域波形,图(b)是处理后脉冲内调频信号波形)。
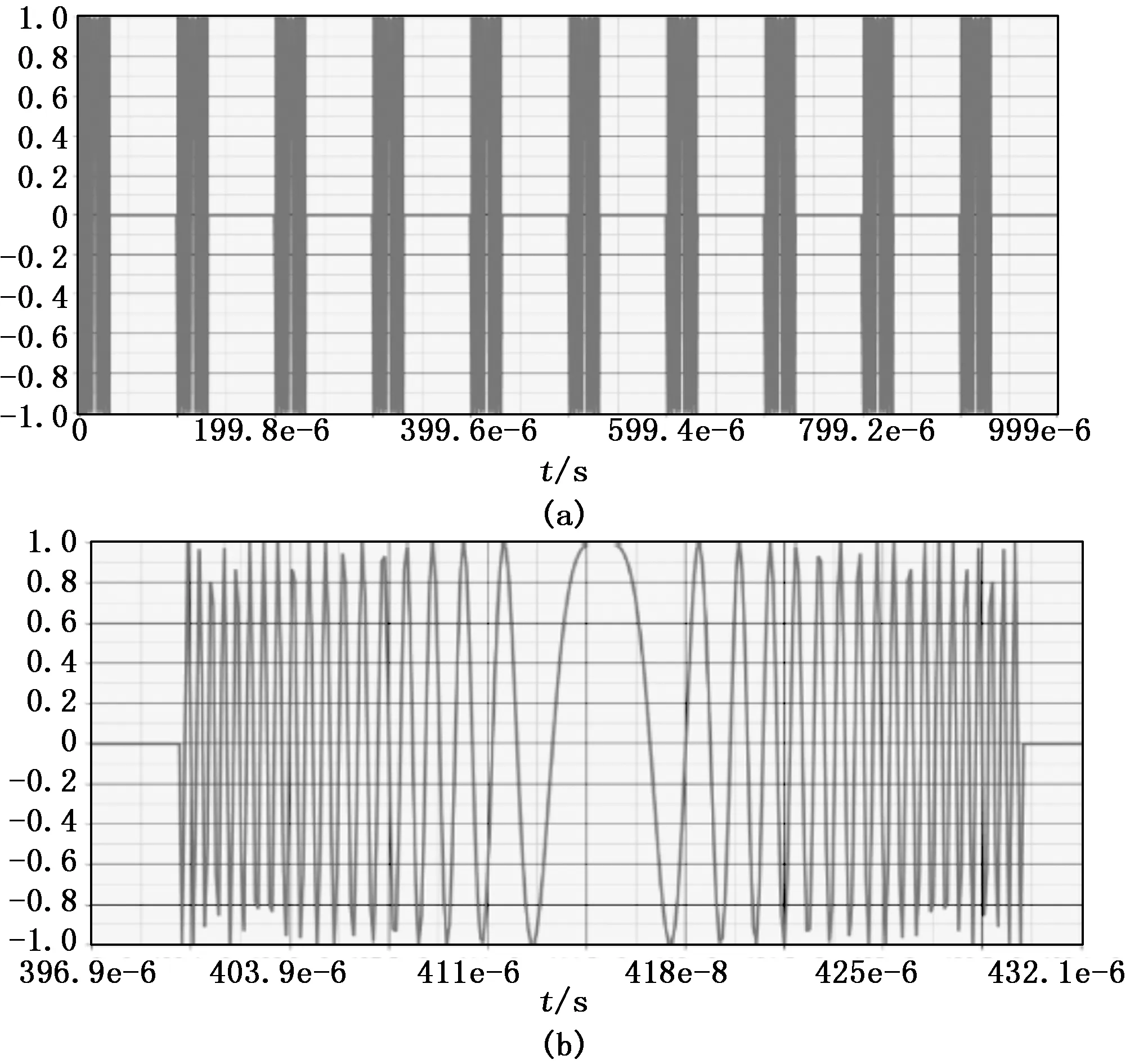
图9 发射信号的时域仿真结果
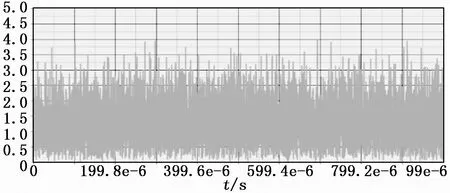
图10 干扰信号的时域仿真结果
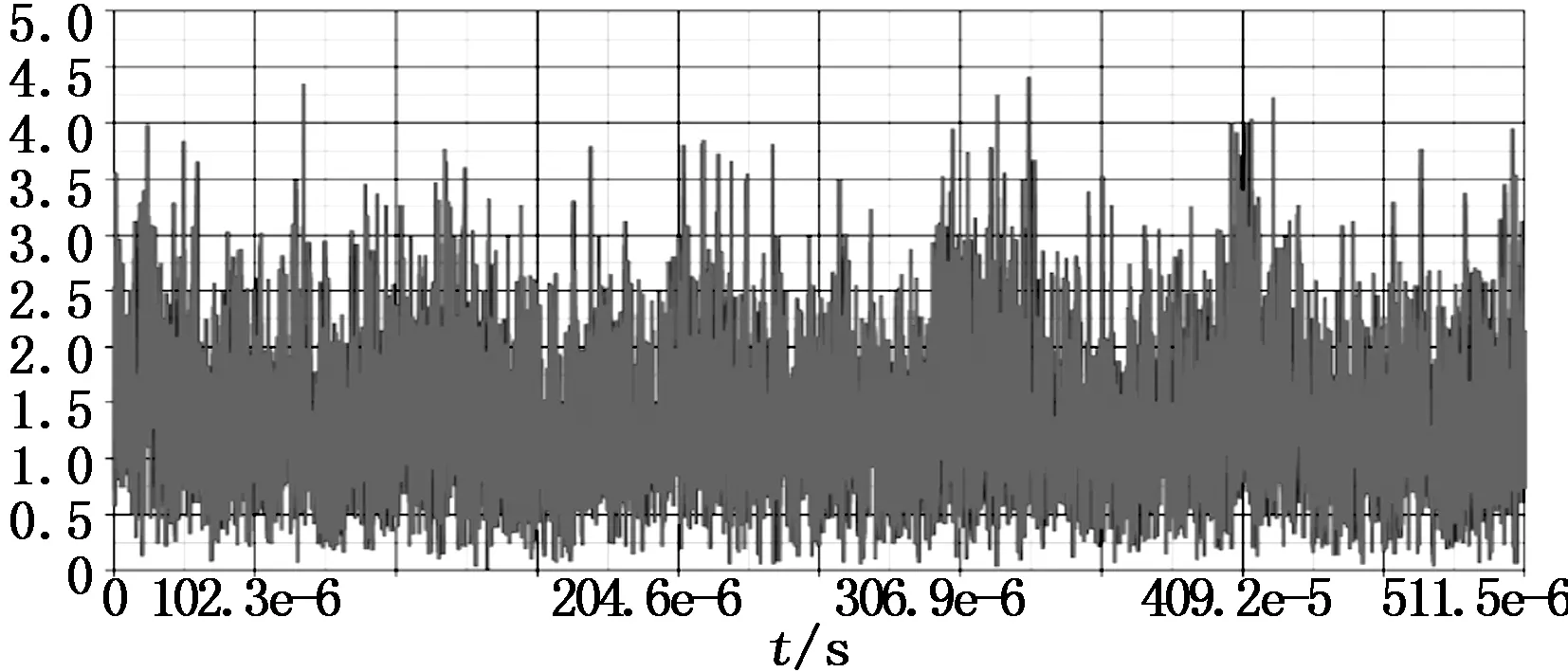
图11 混合信号的时域仿真结果
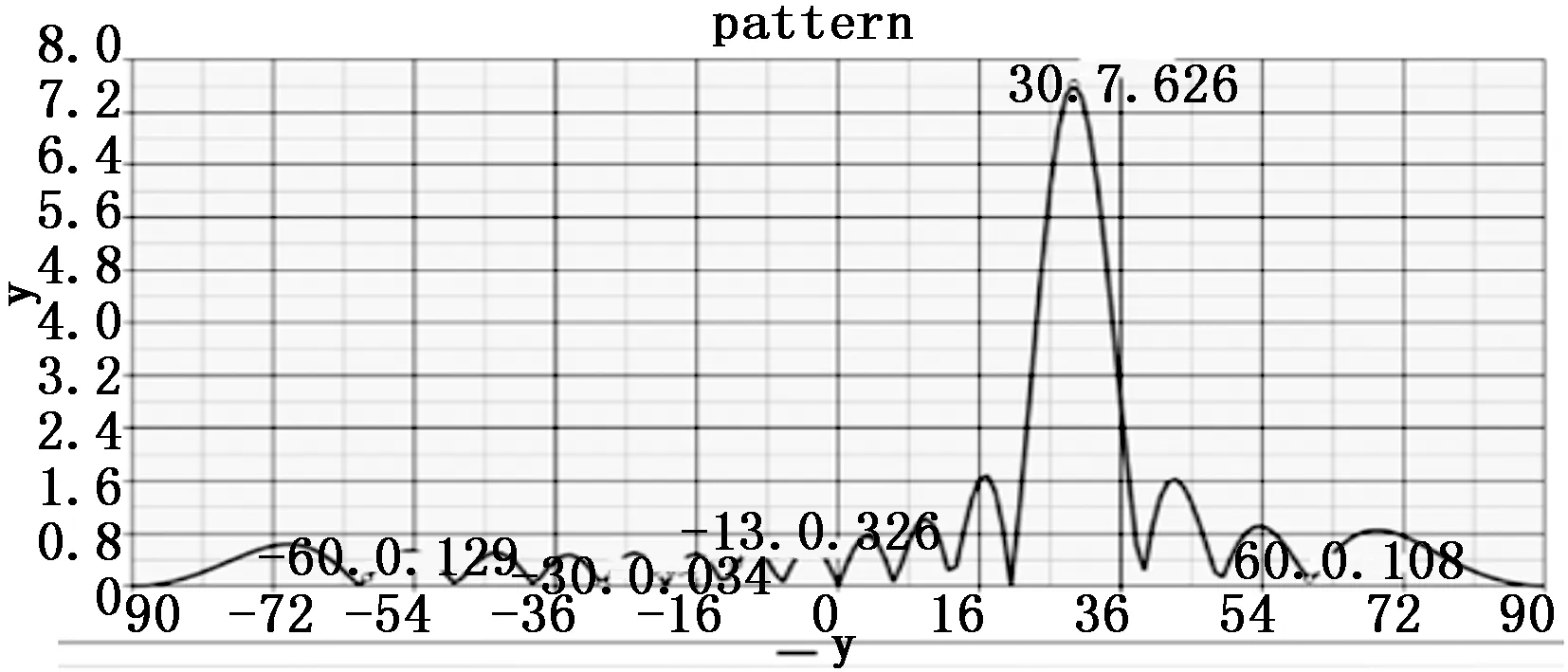
图12 自适应估计权系数仿真仿真结果
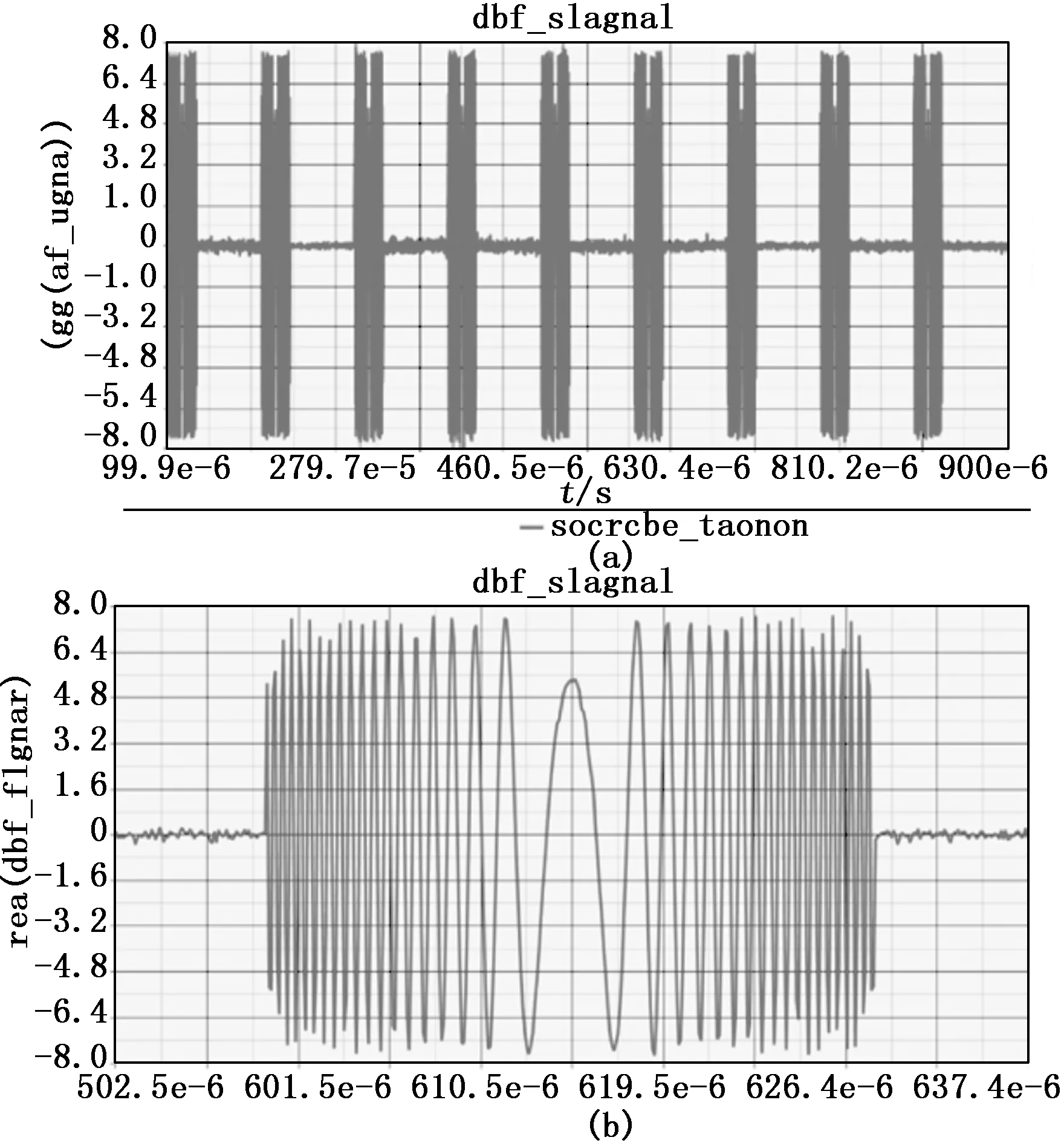
图13 混合信号经自适应DBF处理后的时域仿真结果
由仿真结果波形(图11)可知,发射信号和干扰信号的相互混合,发射信号淹没在干扰中,无法进行识别。经过ADBF模块获取自适应权值后,可以判定发射信号的方向和干扰信号的方向。从自适应权值波形图(图12)得出,在雷达坐标30度方向发射信号权值最大,在雷达坐标60度方向干扰权值最小。再经过DBF模块的数字波束形成处理后,可有效提取出发射信号波形,由图13可以看出,其信号波形与发射前信号波形基本相同,从而验证了设计程序和仿真结果的正确性。
5 结束语
本文主要对三坐标DBF雷达的SystemVue仿真建模方法进行研究,分析了DBF的基本理论,并对SystemVue雷达模块库中用于三坐标DBF雷达空域扫描仿真的阵列收发模块、阵列信号处理模块的功能及参数进行了研究分析,完成了DBF雷达系统的建模。在仿真验证中,以线性调频脉冲发射信号受到干扰的情况进行仿真,通过ADBF的自适应估计权系数,可以有效地判定干扰方向和发射信号方向,从接收阵列DBF模块得到的波形可以看出,从混合信号中有效地识别出了发射信号波形,达到了良好的干扰抑制效果,验证了仿真模型的正确性。
