基于位置反解算法的并联机器人坐标变换方法
2019-12-02
(河南工程学院, 郑州 451191)
0 引言
目前,工业生产自动化水平不断提高,各个行业生产机器人正在快速发展,比如汽车加工、物流仓储、食品饮料、机械制造等领域机器换人的速度正在逐渐提升,未来工业机器人、服务机器人甚至特种机器人都将成为我们生产生活中不可或缺的设备。工业机器人包括并联机器人和串联机器人,并联机器人通过并联方式驱动,由两个以上独立的运动链相互连接,无累积误差及精度较高是并联机器人的突出特点,所以,在工业生产、机械制造等领域获得了广泛的应用。同时,并联机器人的驱动装置可以固定在定平台上,从而使得并联机器人的运动部分速度比较高、重量比较轻、动态响应比较好,所以,在活动工作空间较小,进行精细及高刚度、大载荷加工的工件加工领域内应用较广,发展较快。
对于工业机器人工作的场合,通常需要在线获取机器人的实时位置,而串联机器人求解正解较为方便,而求解反解则非常困难。因为并联机器人的并联机构是对称的,所以各向同性较好,可以通过空间变换进行位姿反解从而求取并联机器人的杆长值。
1 系统结构及原理
一个完整的并联机器人系统包括外部传感器、执行结构、控制器等,外部传感器用来检测并联机器人所处的工作环境和工作状态,执行结构用来执行具体的操作,控制器用来判断和发出指令,当对机器人发出指令时,需要将其编写成计算机所能执行的机器语言载入到机器人的控制器中。六自由度并联机器人的控制系统核心结构为:嵌入式系统、步进电机及其驱动器及控制器等,同时还包括电源适配、控制柜、导轨、电磁阀、人机交互界面等几部分,同时,在嵌入式计算机内安装可以控制机器人工作的软件和运动控制卡。
机器人的控制技术是决定机器人技术发展的关键因素,机器人的控制系统是决定并联机器人控制功能和控制原理的首要因素,它的主要作用是控制并联机器人在指定的空间内的运动位置、运动轨迹、加工操作顺序、加工执行方式等。其包括组织层和协调层,组织层负责轨迹规划和任务空间下完成任务的位姿描述,协调层包括反解计算各个关节值和关节空间的轨迹规划等,在机器人控制器中有机器人自身的控制模型、环境模型,它会根据具体工作环境和工作状态选择一种适合当前情况的控制算法和任务调度规则,信号通过控制器被发送至执行机构,即电机驱动器等一系列装置,期间也在不间断地受到外部传感器的监测,同时,将检测结果传送到控制器。最终执行层的状态则需要外部传感器的检测配合,环境模型的建立也需要外部传感器获取的外部环境信息,到此为止,一个完整的闭环并联机器人系统就形成了。
并联机器人的驱动系统的作用是提供各个可运动部位所需要的原动力。常见的驱动系统分为电力驱动、气压驱动和液压驱动,也可以是三者结合起来的综合驱动系统。从输出功率、响应速度、控制性能、安全性能等多方面的考虑和比较,并且由于该机器人在室内并且应用于高精度的点位以及连续轨迹控制系统中,因而采用电力驱动作为该机器人的主要驱动方式。
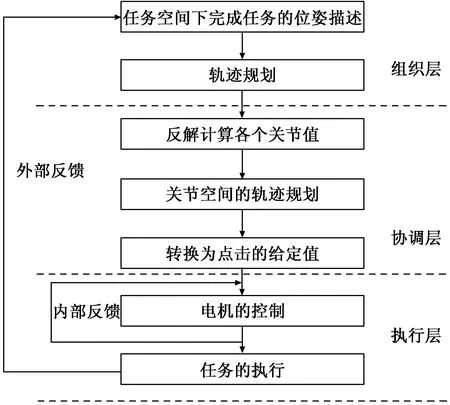
图1 工作原理
2 算法分析
并联机器人的反解算法:
本并联机器人设计采用上下两个平台构成,下面的平台是静止的,为静平台,在其上建立的坐标系我们把它叫做静坐标系。上面的平台是可以移动的,为动平台,在其上建立的坐标系我们把它叫做动坐标系。b1至b6为上平台的6个坐标点,分别对应上平台的6个绞点,6个绞点之间的位置是根据运动情况变化的;B1至B6为下平台的6个坐标点,分别对应下平台的6个绞点,6个绞点之间的位置是固定不变的。
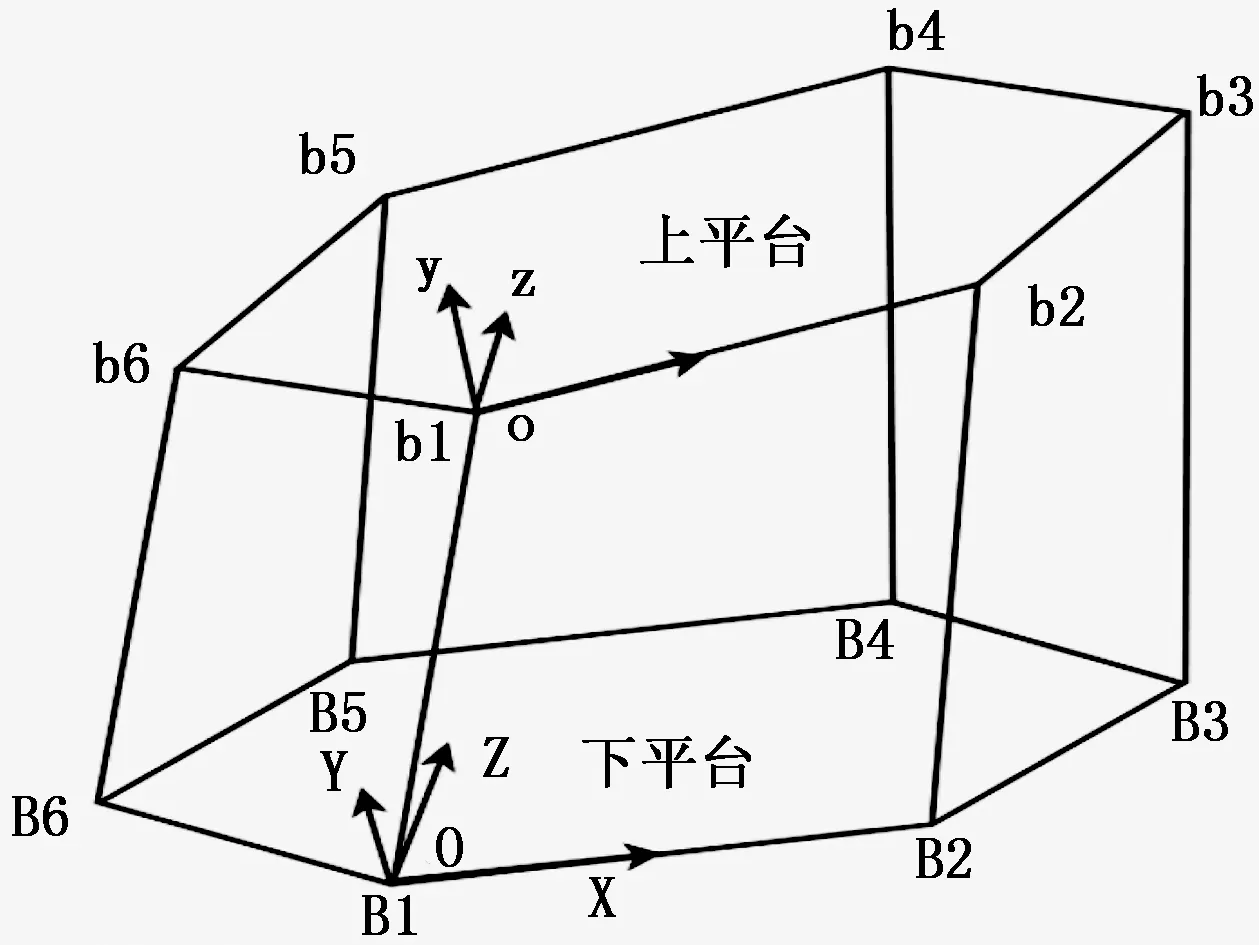
图2 6自由度并联机器人空间结构图
具体分析如下:在动坐标系o-xyz建立在上面的动平台,定坐标系0-XYZ建立在下面的定平台上。经过分析后得知动平台运动的实质就是空间的变换与定平台之间的关系。可以用数学表达式表示两者之间的变换关系。静坐标系中的R可以用动作标系中的任意一个向量R′通过坐标变换求得。其变换公式为:
R=TR′+P
(1)
式子中:T为上平台姿势的方向余弦矩阵;P是在动平台上选的参考点,它是动坐标系的原点相对于静坐标系的位置矢量值。
(2)
上述式子中:T矩阵是建立在动坐标系里的x,y和z在下平台静定坐标系中的方向余弦矩阵,α、β、γ三个参数为以在下面的静平台上建立的精坐标系为基准,在上面的动平台上建立的动坐标系分别沿x、y、z三个轴旋转所转过的角度。
P=[XP,YP,ZP]T
(3)
当并联机器人各个部分结构及尺寸确定后,通过空间几何变换,就可以计算出上下两个平台各铰链点(bi,Bi,i=1,2,…,6)在各自坐标系个的坐标值据此可以计算出电动驱动杆的长度L。
其公式为:
li=bi-Bii=1,2,3,…6
(4)
(5)
从而得到机构的位置反解计算方程:
(6)
(6)式有6个方程,共有6个未知数,通过获取并联机器人上下两个平台的位置和姿态,就可以利用上式求出6个驱动杆的位移。这就是所研究的并联机器人的位置反解问题通过静平台与动平台之间的坐标变换构造空间矩阵进行计算的结果公式。
为了更好地表示空间内静平台所作的平移变换和旋转变换,也可以借助齐次坐标来表示所在点的空间位置,各点在空间的转动和平移等位置,可以通过齐次变换矩阵来计算表示。可以假定空间某点M的笛卡尔坐标为M(x、y、z),然后用一个四维列向量T[xyz1]表示M点的齐次坐标。这种表示方法有两个优点,使用齐次变换矩阵不仅可以规定表示坐标点的位置,还可以用来规定表示矢量的方向,即当第4个元素为1时,代表该变换矩阵表示坐标点的位置,而第4个元素为0时,代表该变换矩阵表示坐标点的方向。
反解算法的步骤如下:
1)查阅机器人的结构资料,获得并联机器人的原始数据。
2)建立并联机器人的动静两个坐标系并确定其原点。
3)求出动坐标系的原点以及各个铰点相对于静坐标系中的位置矢量。
4)跟据机器人的各个部位结构尺寸求出初始状态下各个杆长。
5)给出变化后的静平面的各个铰点相对于原静平面的坐标。
6)再次求出动坐标系各个铰点相对于静坐标系中的位置矢量。
7)计算出此时电动驱动杆的长度L。
3 算法验证
并联机器人的正解问题就是已知驱动杆变化的长度变化量,求动平面所在空间的位置坐标,求解并联机器人的正解会出现一个复杂的多解问题,当然,我们可以通过使用差分算法进行求解,不过,这相对于反解算法问题进行数学问题的换算分析,这种方法则要复杂的多。
为了验证该反解算法的可行性和有效性,文中通过MATLAB进行了仿真验证。先建立上下两个平台的动坐标系和静坐标系,并求取上平台各绞点相对于下平台的坐标值,然后再根据并联机器人的资料计算求解初始状态的各个驱动竿的长度,给出静平面的目的坐标值,重新求出动平面各个绞点相对于静坐标系中的位置矢量值,最后根据上下两个平面各绞点坐标求取得到驱动竿的长度。
部分源程序如下:
t=0:0.1:2;
y1=-4.48*t.^3+13.43*t.^2+38.74;
figure(1)
其次,要综合考虑上下游营改增政策的实行状况,对定价和收款的方法进行合理的调整。尤其是下游不动产企业,在其执行营改增政策以后,要对双方的纳税需求进行统筹分析,提前筹划,有效节省税制变动成本的支出。
plot(y1)
y2=-4.98*t.^3+14.93*t.^2+42.90;
figure(2)
plot(y2)
y3=-0.98*t.^3-2.93*t.^2-2.81;
figure(3)
plot(y3)
y4=0.7*t.^3-2.10*t.^2-1.12;
figure(4)
plot(y4)
y5=-3.75*t.^3+11.24*t.^2+32.84;
figure(5)
plot(y5)
y6=-3*t.^3+9*t.^2+26.95;
figure(6)
plot(y6)
算法验证所用并联机器人的结构尺寸参数设置如下:
并联机器人的自由度:6
驱动杆的长度:l=223 mm
上平台外接圆的直径:R=129.74 mm
下平台外接圆的直径:r=65.5 mm
各驱动杆的行程:100 mm
驱动元件的方向:Z向
驱动元件的最小伸长量:158.896 6 mm
驱动元件的最大伸长量:258.896 6 mm
所选6自由度并联机器人空间坐标及并联机器人的驱动竿的初始长度设置如表1所示。
选择确定上下两个平台各绞点坐标及初始状态下的驱动杆的长度为212.57 mm,在实际运行过程中,由于并联机器人本身机械结构的原因bi点(动平台的各个铰点)的实际运行轨道为仅沿Z轴平行移动,而X轴与Y轴坐标均不会发生改变。因此上面动平台上铰点的各个坐标的z轴变化量就是驱动关节滑块的移动距离208.897 mm。
经对对反解算法进行仿真计算,可以得到上平台各个绞点变换后的坐标值,并且,当静平面的目标值为(0,0,50)时,得到各个驱动杆的长度为163.61 mm,变化量为48.96 mm;当静平面的目标值为(0,0,-20)时,得到各个驱动杆的长度为232.25 mm,变化量为19.68 mm;并联机器人运动后的结果表明:对于各种不同结构的并联机器人,只要根据其结构分析建立其空间坐标系我们就能对其进行反解解算,这种并联机器人坐标求解方法具有普遍性,输入目的坐标值即可获得上平面各铰点坐标及驱动杆长的变化量。
4 小结
并联机器人在工业生产、精密加工、汽车电子、航空航天等领域的应用随着智能制造技术的深入发展会日益增加,而对并联机器人的控制方法也必定会不断革新。通过本次对并联机器人的工作原理和机械结构的设置,及其位置变换解的反解算法的研究,对其位置反解定位方法进行了介绍和验证,验证结果表明,与正解算法相比基于位置反解算法的并联机器人坐标变换方法更加简洁有效,具有更大的应用价值和应用潜力,经过简单的计算即可获得各个机器杆的变化量,并联机器人结构中没有驱动器的累积误差,因此使得它们具有很高的精度。此外大多数的并联机器人可以保证基座驱动器的密封性,在较为潮湿、有辐射、高温甚至在太空等恶劣的环境下仍可保持良好的性能,应用环境也更为广泛。
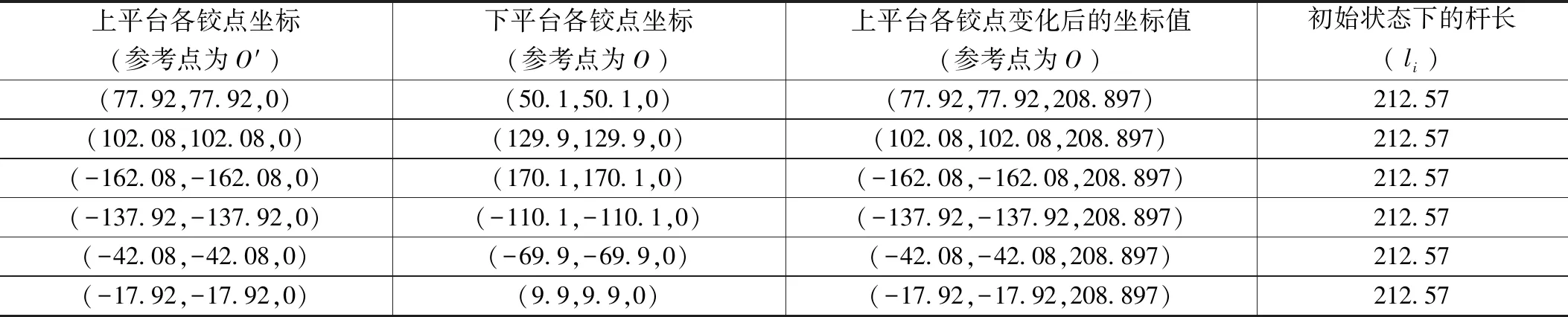
表1 所选机器人初始杆长与坐标
注:以上坐标由并联机器人的机械结构以及其初始状态所决定。
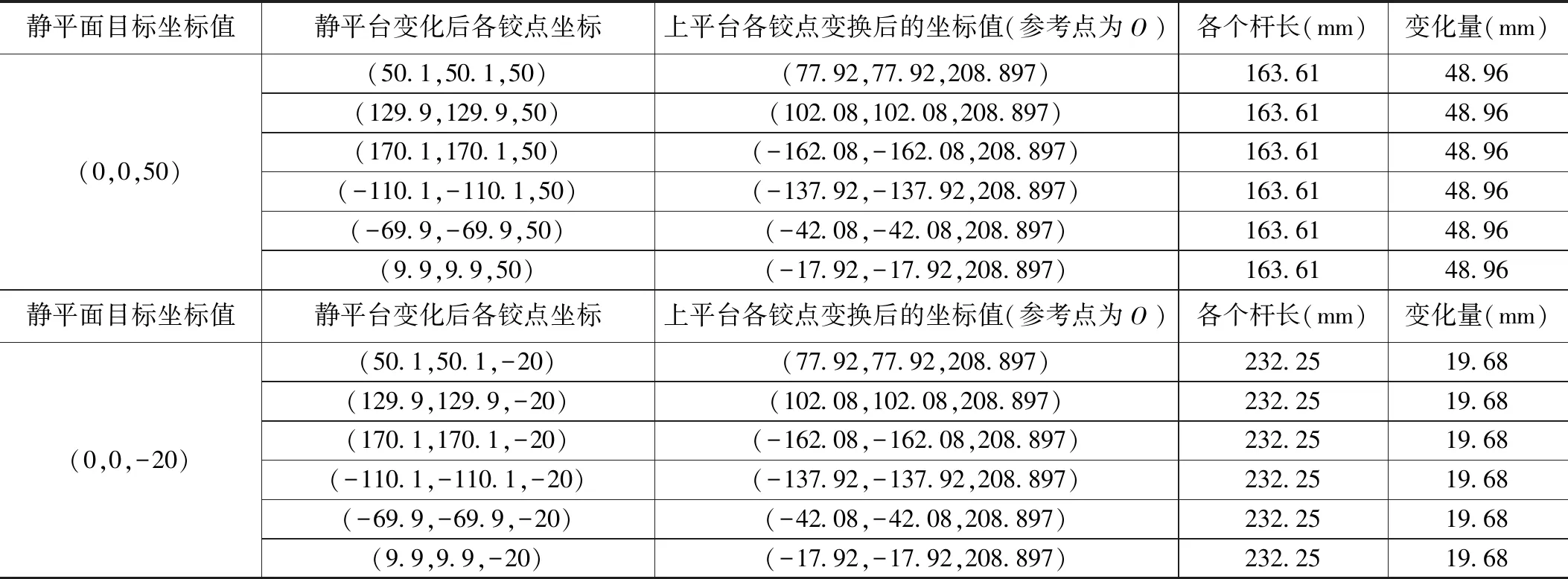
表2 运动后的杆长及其变化量
注:以上变化起始点均为(0,0,0)。
