无刷直流电机自适应调速控制系统的设计
2019-12-02军1程诗卿1黄海波1陈宇峰1王志虎
卢 军1,程诗卿1,黄海波1,陈宇峰1,高 云,王志虎
(1.湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002;2.东风汽车动力零部件有限公司,湖北 十堰 442000)
0 引言
直流电动机具有运行效率高、调速性能好等诸多优点而得以广泛的运用。但传统的直流电动机大都采用电刷,以机械换相方式进行换相即有刷电机,由于摩擦等物理因素进而存在噪声、火花、无线电干扰以及寿命短等弱点[1]。随着半导体行业的飞跃发展发展,借助位置传感器和电子换相线路来替代机械换相的直流无刷电机应运而生[2-3]。
为了使得三相直流无刷电机在各控制系统中得到更好的运用,设计生产一款稳定的、控制性能优越、成本低廉的驱动控制器将成为直流无刷电机发展的重要需求[4-6]。本系统设计的是基于SPANSION MB9BF121K单片机的三相直流无刷电机控制系统,系统采用上位机实现电机转速设定及曲线绘制以及人机交互,驱动部分主要采用IR2101S双通道高速功率驱动器,控制部分实现电机正反转运行控制、电机测速、PID算法调节及防过流、防堵转等电机保护功能。
1 系统总体方案设计
如图1所示,本系统是基于SPANSION MB9BF121K单片机的三相无刷直流电机驱动器的设计。系统采用有感驱动方式的PID闭环调速控制,利用霍尔位置传感器来反馈位置,根据位置信息对电机进行换相,使电机连续平稳运行,并同时利用位置信息计算电机的当前转速,反馈到单片机上,进行速度PID闭环调节,使电机转速稳定。能够实现无刷直流电机的正反转和启停控制,整个过程通过串口与上位机通信,实时显示当前的转速曲线,并可以通过上位机进行转速的设定以及启停,同时具备PID参数的设定等人机交互功能。
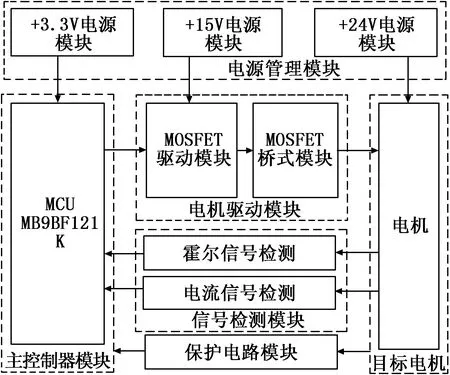
图1 系统总体结构框图
2 系统硬件设计
从图1可知,本系统硬件部分主要由六大部分组成,分别是:电源管理模块、主控制器模块、电机驱动模块、信号检测模块、电机保护电路模块以及目标电机组成。电源管理模块为系统提供所需的各类电源,电机驱动模块实现MCU信号对目标电机控制,信号检测模块检测电机运行状态,为电机换相及电机保护提供参数支持,保护电路模块检测电机运行的状况,防止过流和堵转。限于篇幅,下面主要介绍电机驱动模块、信号检测模块以及保护电路模块。在电机驱动模块中重点要做好高压浮栅型驱动电路的设计,在MOSFET导通时要保证15V的导通压差,在MOSFET管关断情况下加快栅极-源极电容放电;在信号检测模块中重点要做好霍尔信号检测及处理电路,保证获取纯净和稳定的霍尔信号以利于提取转子位置和速度信息;保护电路模块除了完成电流的实时采集,还要做好过流保护,一旦电流过大就要触发单片机的过流中断。
2.1 MOSFET驱动模块
MOSFET驱动部分电源是+24 V,当MOSFET管导通时,源极电压近似为电源电压+24 V,为保证MOSFET管维持导通,栅极电压必须大于+24 V,为实现比电源电压还高的驱动电压,采用了高压浮栅型驱动电路。
基于IR2101S的驱动电路如图2所示,HIN为上桥臂控制输入,LIN为下桥臂控制输入,HO为上桥臂驱动输出,LO为下桥臂驱动输出。电容C29为自举电容,其在MOSFET管断态时通过二极管D5被15 V充电。该电容在器件导通时可将栅极电压抬升至39 V,使栅极-源极得到15 V的导通压差,以避免MOSFET管关断,防止欠压自锁。R9、R10为33 Ω电阻,其主要作用是防止震荡、减小栅极充电峰值电流、保护场效应管漏极-源极不被击穿。D11、D15为1N4148二极管,主要是在MOSFET管关断情况下加快栅极-源极电容放电。
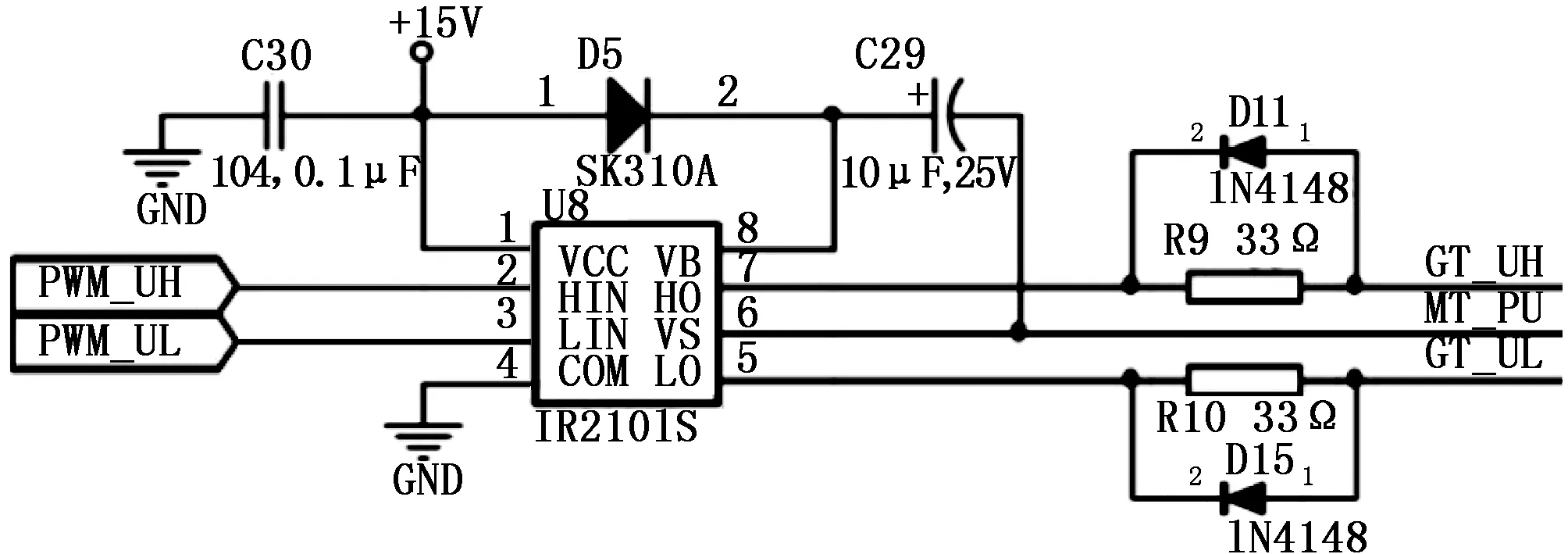
图2 MOSFET驱动模块
2.2 信号检测模块
信号检测电路主要实现霍尔信号检测及处理,如图3所示,在霍尔信号输入端加入了施密特反相器,以获得一个干净稳定的霍尔信号。EDS1为防静电保护,R18、R19为分压电阻,使得输出霍尔信号为3.3 V,C37为滤波电容,滤除霍尔信号中高频噪声信号,以保证霍尔信号的稳定。
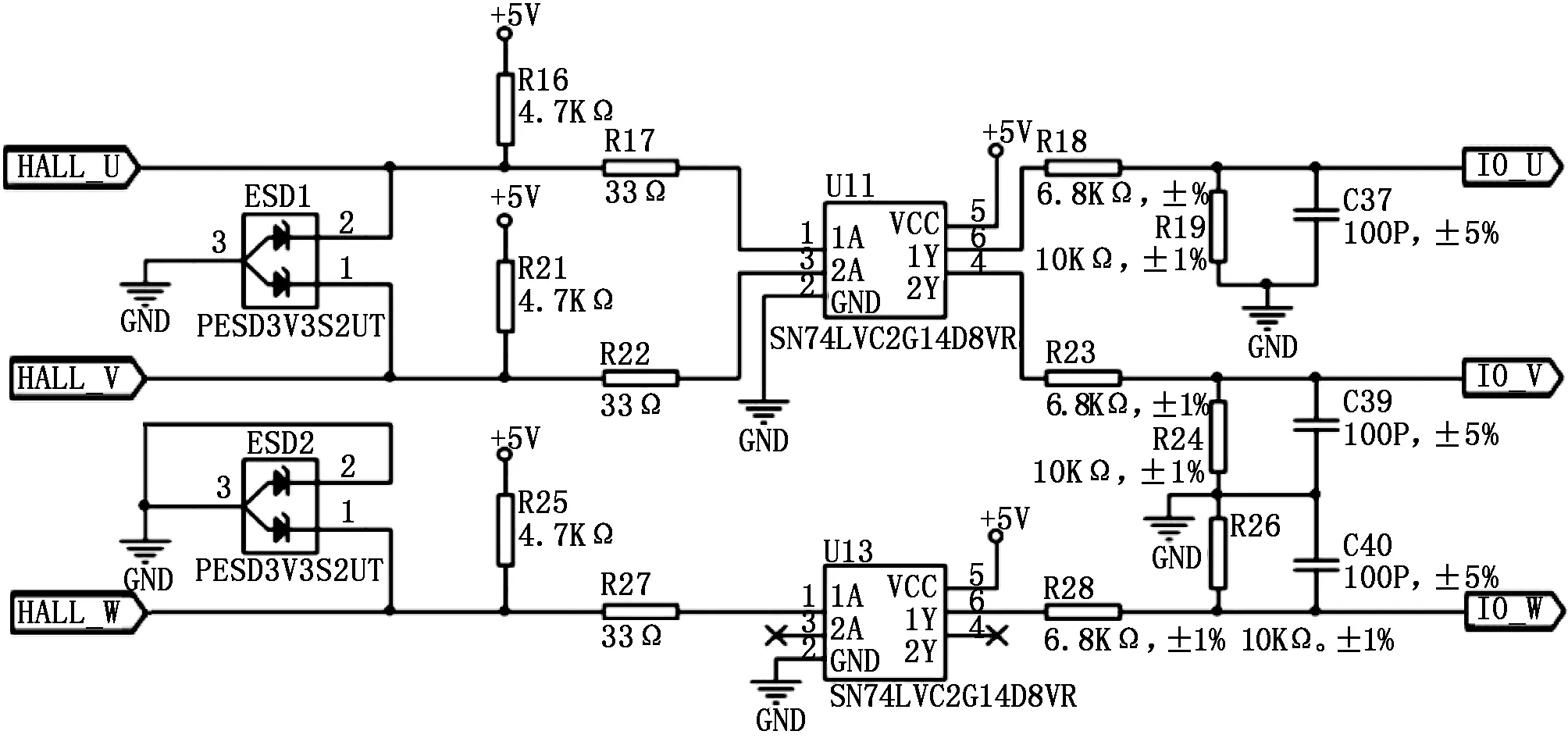
图3 霍尔信号检测模块
2.3 电流采集与保护电路
电机保护电路设计如图4所示,采用比较器电路,输入信号为采样电阻端电压,当电机过流或堵转时,采样电阻端电压增大,超过门限电压后,比较电路输出一个下降沿信号,触发DTIF电机急停保护中断,防止电机过流损毁,相比软件保护而言,具有响应速度快的优势。
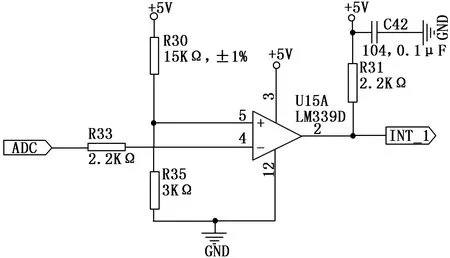
图4 电机保护模块
3 系统软件设计
系统软件由上位机与下位机两部分构成,上位机软件实现系统的控制与显示功能,下位机软件控制电机的运行以及故障处理等功能,软件架构如图5所示。
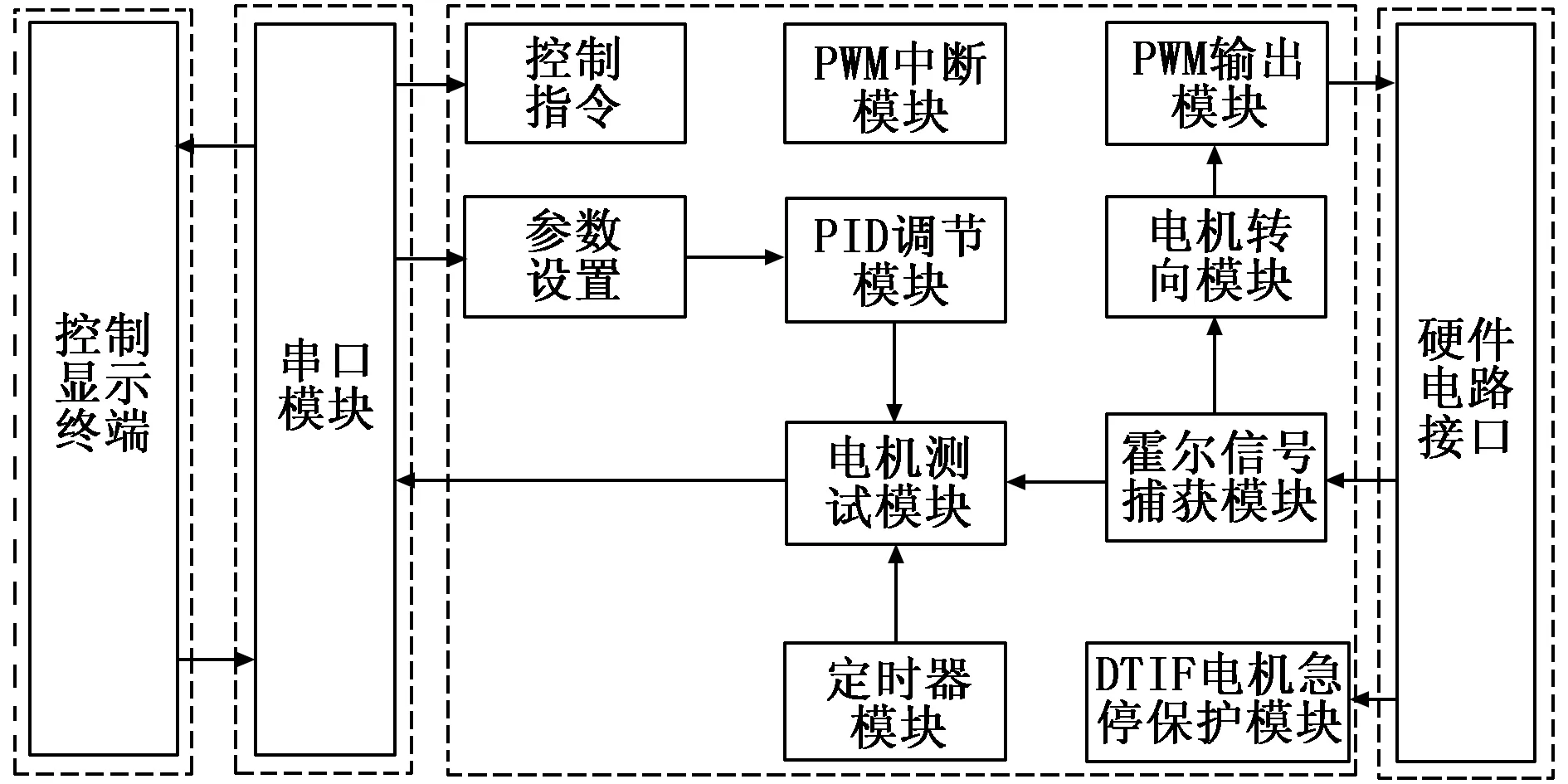
图5 软件架构框图
系统运行时,上位机向主控制器模块发送开始工作指令;主控制器模块接收到指令后,通过信号检测模块获得电机霍尔信号,测得信号经电机换相函数控制PWM模块输出相应状态的PWM波;输出的PWM经电机驱动模块后驱动电机转动;霍尔信号被电机换相函数处理的同时经电机测速函数测得电机当前转速,通过串口发送至上位机实时显示;若进行闭环控制,由上位机设置后,PID模块得到PID参数,根据测得的电机转速进行PID调节。本系统设计有硬件过流保护装置,信号检测模块测得电机过流时触发DTIF电机急停中断,关闭PWM输出对系统进行保护。软件流程如图6所示,下面重点介绍电机换相处理、测速以及PID速度调节。为了精确地对速度进行测量,采用T法和M法相结合的方法,在转速小于500 r/min以下时采用T法测速,在转速大于500 r/min以上时采用M法测速[7-8]。同时采用递推均值法和一阶RC滤波法相结合的数据滤波处理方法[9-10]。在速度控制时,采用自适应分段PID速度控制策略,根据绝对速度误差的大小来施加不同权重的积分和微分作用。
3.1 电机换相处理
电机转动过程中测得霍尔信号时序如图7所示,当电机转子转动60°电气角度后,霍尔传感器检测到另一种信号状态后控制器部分将改变功率MOSFET的导通顺序。
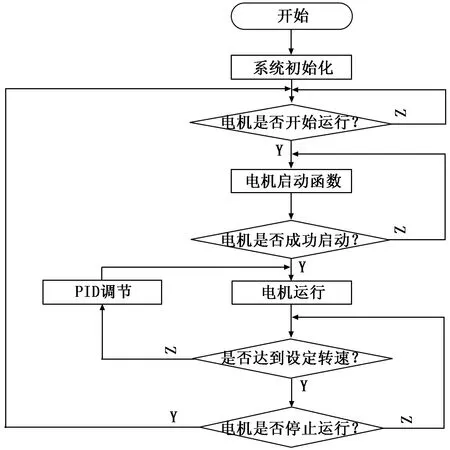
图6 软件设计流程图
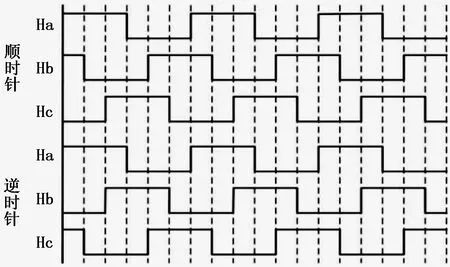
图7 霍尔信号时序图
经测量,直流无刷电机转动时各功率MOSFET导通顺序如表1所示。其中,AH、AL、BH、BL、CH、CL分别对应三相桥臂的上下半桥。在保证功率MOSFET导通顺序正确的情况下要防止驱动桥上下桥臂同时导通,需要加入一定的死区时间,避免一个桥臂尚未完全关闭就将另一个桥臂开启,导致上下桥臂短路而使功率MOSFET烧毁。
3.2 电机测速
MB9BF121K单片机的外部输入捕获单元ICU用于检测霍尔信号从而得到电机转速。ICU由FRTS、沿检测电路、16 位捕捉寄存器和控制寄存器构成。基本单位为2路通道构成,各个通道带有2组各种电路。ICU捕获管脚信号检测到有效沿时,就捕捉FRT计数值并对CPU发生中断如图8所示。边沿检测电路是检测输入信号的有效沿的电路,ICCP寄存器将输入信号的变化时机作为FRT计数值捕捉,输入信号的有效沿可从上升沿、下降沿和双沿中选择。在检测到预先设定的有效沿且进行捕捉的时刻,可对CPU触发中断进行电机换相和测速。
本系统使用的三相直流无刷电机最高转速在4 200 r/min,为了精确地对速度进行测量,采用T法和M法相结合的方法。在转速小于500 r/min以下时采用T法测速,测量单个脉冲信号周期,换算成脉冲信号频率得到电机转速。在转速大于500 r/min以上时采用M法测速,通过单位时间内测量待测脉冲信号的个数,换算得到电机转速。
系统运行过程中存在一定的机械振动,同时霍尔信号也存在一定的误差干扰,所以必须对测得转速数据进行滤波,以保证数据的稳定性及可靠性,这里采用递推均值法和一阶RC滤波法相结合的方法。即首先采用递推均值法:设定一个N长采样值的序列,根据序列先进先出原则,将每次采样得到的数据放入序尾,同时将原来序首的数据丢弃,然后将序列中的数据进行算术平均得到滤波后的数据。然后采用一阶RC滤波法:设加权因子为a∈0~1,将前面滤波后的数据和本次采样值再进行如下的一阶RC数字滤波:本次采样值*(1-a)+a*上次滤波结果值。为保证滤波效果和数据输出的实时性,经过测算N=30,a=0.7。图9是滤波后的转速曲线对比,可见一阶RC滤波与递推均值滤波后得到的转速曲线效果明显好转,保证了系统的稳定性。
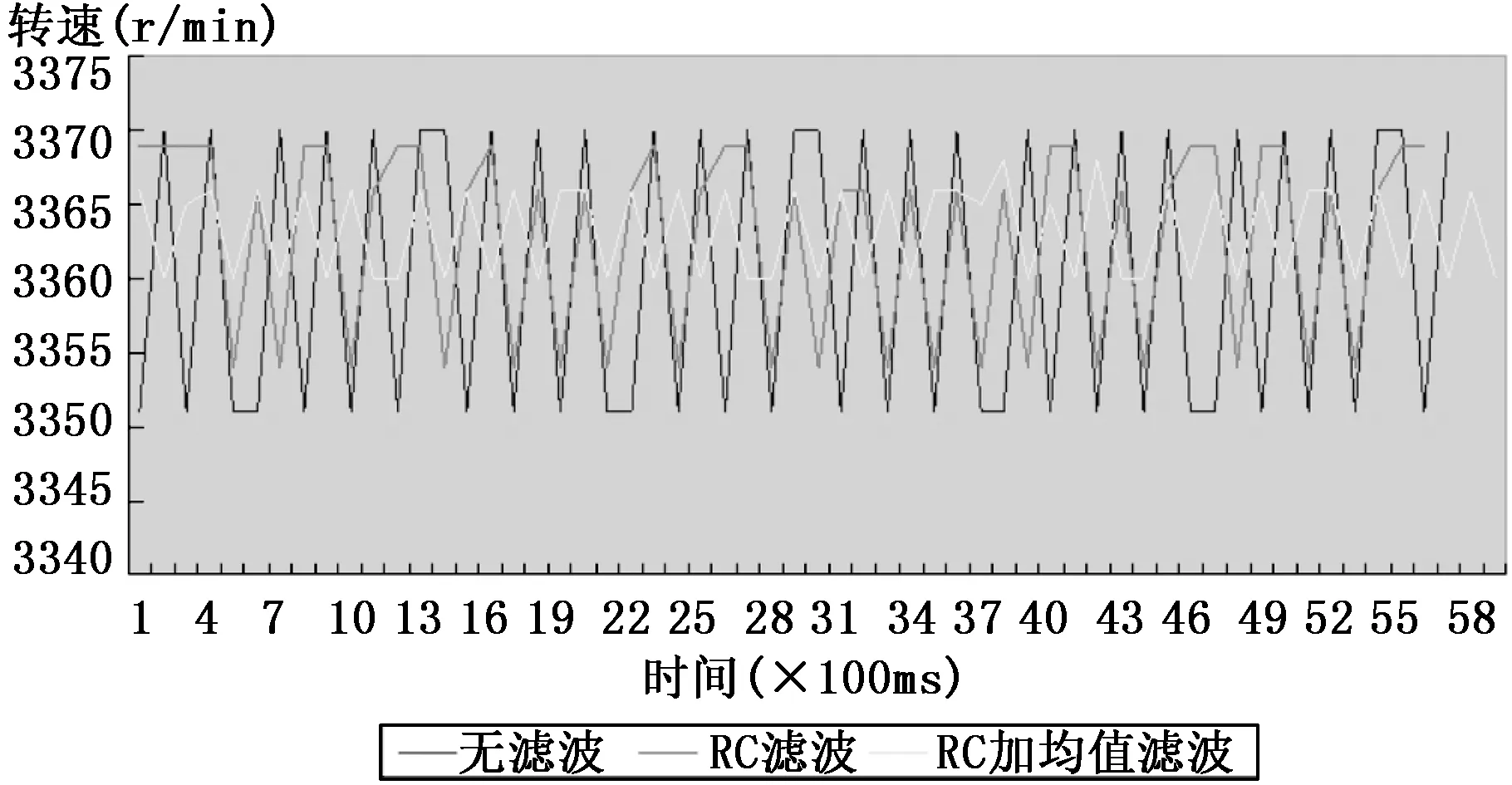
图9 滤波转速曲线对比
3.3 速度控制
电机在带负载运行时,尤其当电机在启动、停止,或者大幅度加减速和负载突变时,速度的设定值与反馈值之间都会出现较大的偏差。为避免积分作用降低系统响应的实时性以及微分作用给系统带来较大的扰动,根据绝对速度误差ξ大小施加权重β的积分和微分作用,以达到逐步消除静差提高控制精度和加快系统响应速度的目的。设速度误差为err(k),且绝对误差ξ=|err(k)|。根据本系统电机参数,经过多次调试确定了如图10所示的β/ξ关系。当ξ小于400 r/min时,PID运算中比例积分微分各部分全部作用;当ξ大于2 000 r/min时,PID运算中只有比例部分起作用;当ξ在其他范围取值时,PID运算中积分和微分作用的权重分别在0~1之间取值。最后由公式(1)计算PID调节结果。
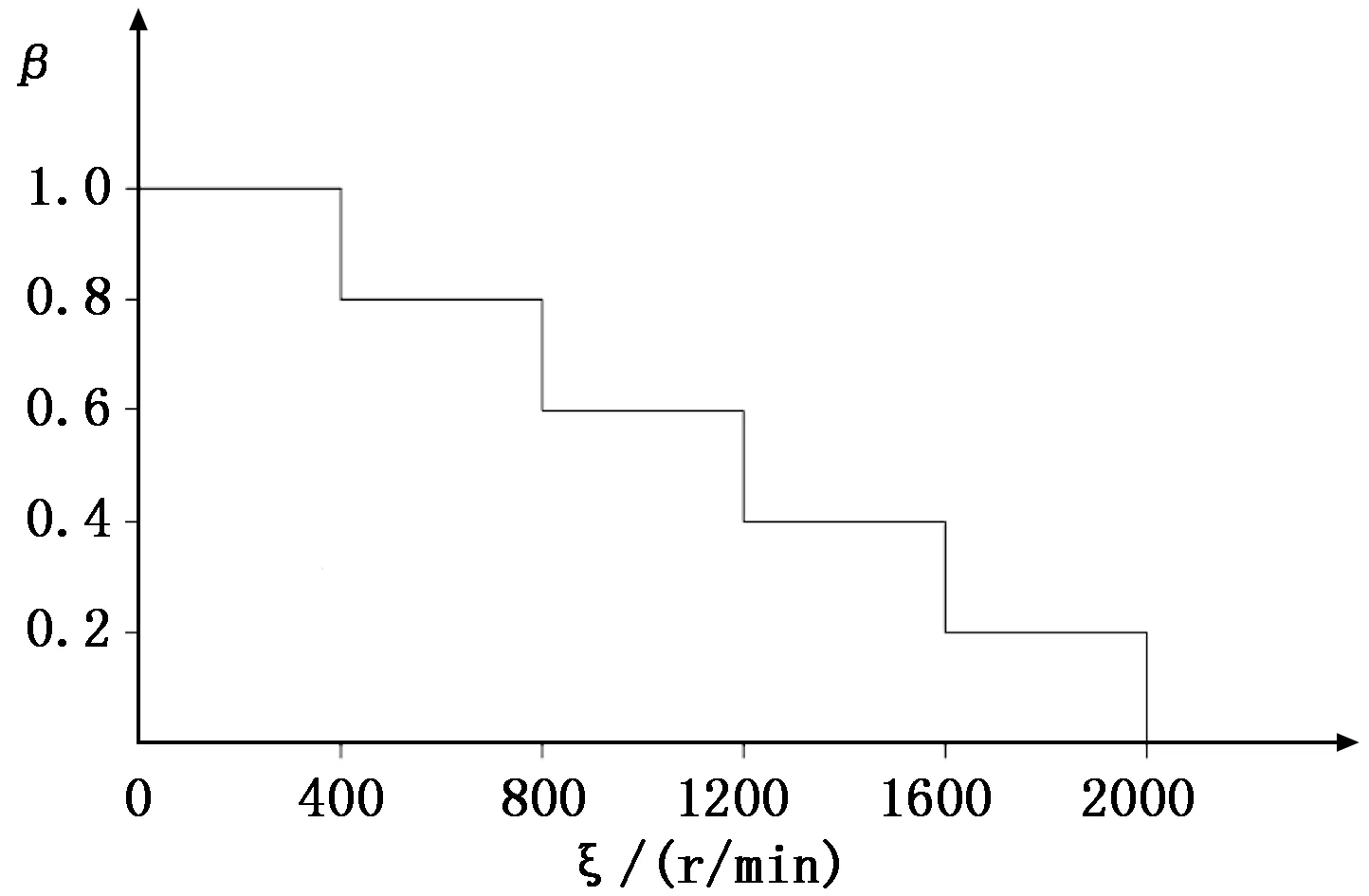
图10 β/ξ关系图
u(k)=kperr(k)+
(1)
这里,T为采样时间,在系统里是速度调节的计算周期。
4 系统测试
利用LABVIEW开发上位机监控软件,主要功能包括两部分,分别为接收数据编解码部分以及发送数据编解码部分。主要包括开环闭环控制选择、电机正反转选择、系统运行控制按钮、电机转速电流拟合曲线图、PID参数设置等。电机额定参数为:电压24 V,功率50 W,转速4 000 r/min。为验证系统性能,分别进行了空载实验和负载试验,设采样周期T=0.2 s。
在图11空载测试中,电机从起始运行速度250 r/min经过0.8s达到设定额定速度4 000 r/min,稳定运行至6.5 s时,又从额定转速4 000 r/min经过0.8 s达到设定转速250 r/min。可见系统无超调,响应速度快,响应后的速度也很平稳。对应的电流从起始的0.5 A快速上升到约1.3 A,约0.5 s后稳定到额定转速下的0.75 A。同样在转速下降至起始速度250 r/min时,电流也非常平滑的降落并稳定至起始值0.5 A。
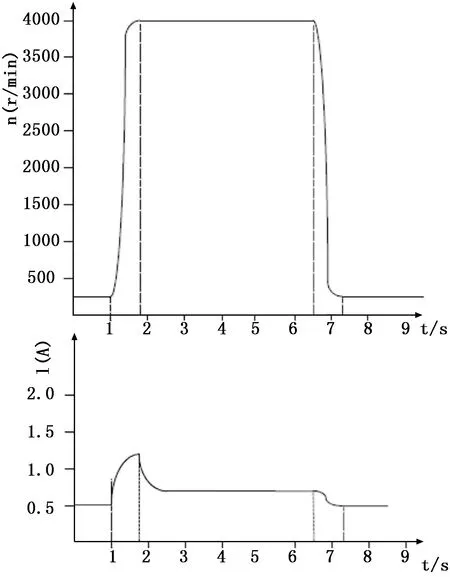
图11 空载测试速度电流曲线图
在图12负载测试中,电机的设定目标速度是2 000 r/min,在4 s时减轻负载,速度上升到2 800 r/min后又回到2 000 r/min,过渡时间约1.5 s。在8 s时施加上撤销的负载,速度降落到1 200 r/min后又回到目标速度2 000 r/min,过渡时间约1.5 s。在减轻时,电流从起始1.5 A快速降落至0.5 A以下,并和速度同步稳定至1.0 A。在重新施加负载时,电流从1.0 A快速上升至2 A以上,并和速度同步稳定至起始1.5 A。
5 结论
本系统基于SPANSIONMB9BF121K无刷电机专用控制芯片设计了三相直流无刷电机驱动器,利用霍尔位置传感器实现无刷电机的有感驱动。系统主要分下位机驱动控制部分以及上位机控制软件。主要实现了以下功能:1)驱动器设计有过流、防堵转等电机保护,当电机运行故障时,故障指示灯提示故障,同时停止运行以保护系统,提高系统安全性;2)驱动器可由上位机软件控制,系统可由上位机设定电机转并实时显示电机转速曲线;3)由于采用分段自适应PID速度控制策略,使得电机转速更加稳定,同时提高了电机的带负载能力和抗干扰能力。
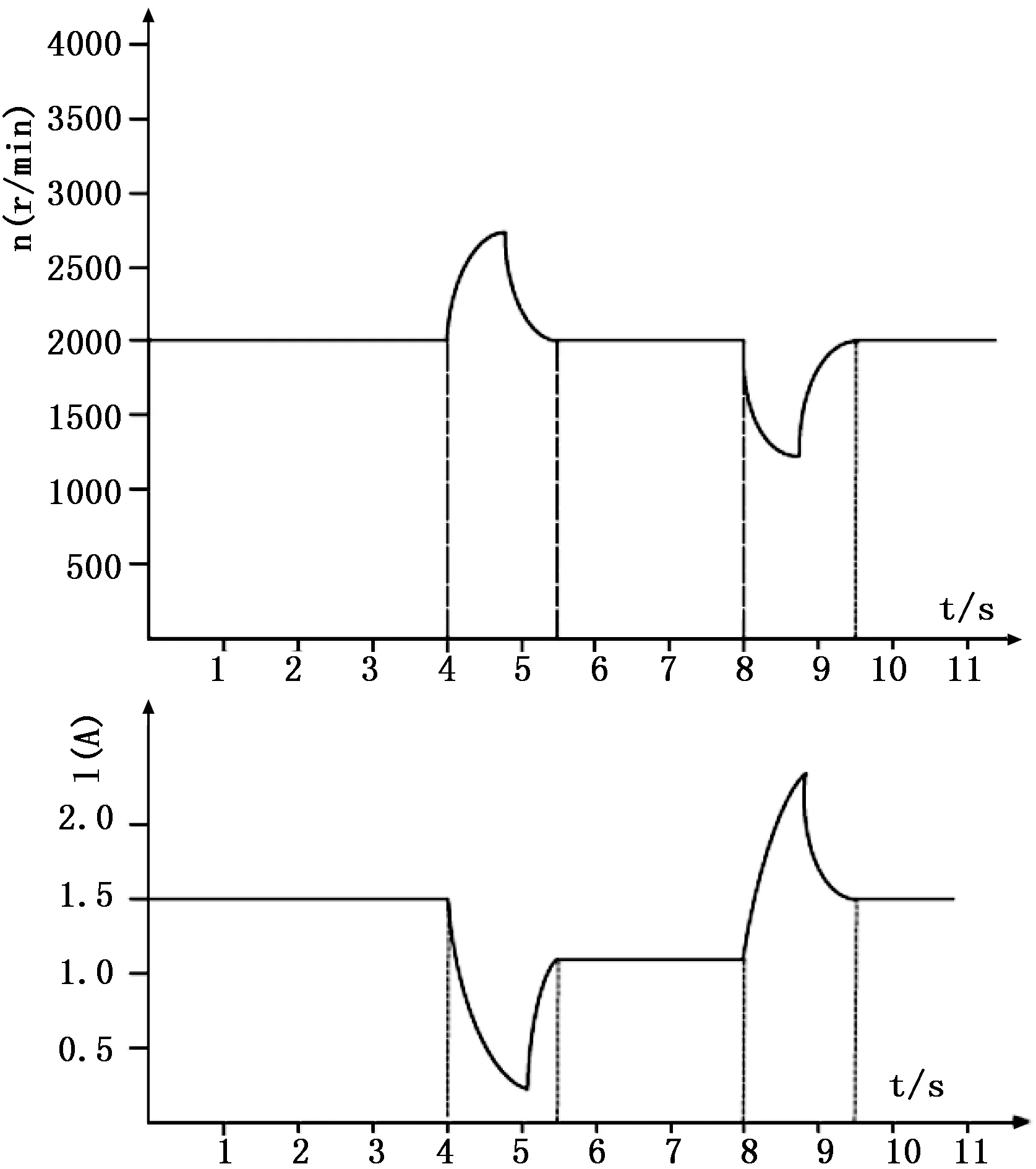
图12 负载测试速度电流曲线图
