一种斩波式软起动器的硬件研究
2019-11-30程秀玲单水维李兰云李仕慧
程秀玲 单水维 李兰云 李仕慧


摘 要:交流斩波调压技术作为一种高性能交流调压技术,符合电子技术的高频化、高效化以及低污染发展趋势,将逐步取代晶闸管相控交流调压(中、小功率),新器件的发展与成熟将加速这一进程,其在一些电动机调速工具有不可比拟的优越性。丰富的控制种类,多样的双向电子开关组合,为不同使用要求提供高性价比产品,是一种经济型交流调压技术。
关键词:主回路;驱动电路;控制回路;保护回路
一、 引言
本软起动器主要包括主回路、驱动电路、控制回路和驱动保护回路。主回路主要由三个双向电子开关组成,通过控制双向电子开关的导通实现改变加载在电机两端的电压;而接触器的主要作用是在软起动过程完成以后,把双向电子开关从三相电源中旁路。在需要软停车时,再把软起动器装置接入到电机回路中,完成软停车的功能。
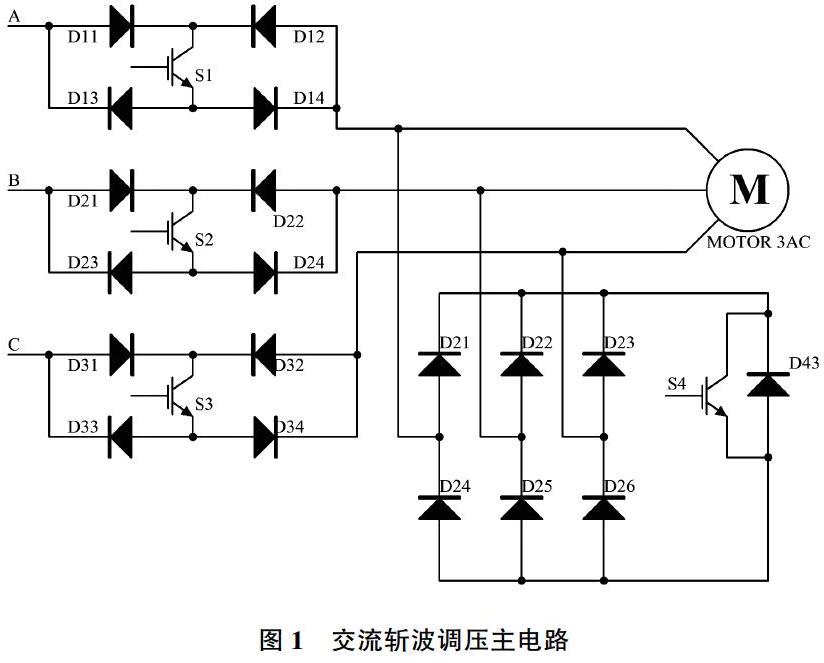
二、 主电路
如图1所示,由三相电源、交流调压、电动机组成,斩波控制式的交流调压电路由IGBT和二极管构成。
采用三个单管双向电子开关组成调压电路。在双向电子开关的两端并联接触器的常开触点,当软起动时,接触器断开,软起动完成后接触器闭合,PWM控制信号停止输出,软起动过程结束,双向电子开关被旁路。当软停车开始时,PWM控制型号输出100%占空比的信号,接触器断开,双向电子开关入煮电路,软起动器进入到停车过程,如此重复来完成软起动和软停车。
三、 驱动电路
落木源电子技术有限公司的驱动器产品,目前有TX-KA、TX-KB、TX-KC、TX-KD四个系列。其中KA系列IGBT驱动器采用光电耦合器隔离,次级需要隔离的辅助电源供电;KB系列采用变压器隔离,工作频率比较高,次级也需要隔离的辅助电源供电;KC系列IGBT驱动器采用变压器隔离,次级使用自给电源,因此次级不需要另外的隔离电源。以上三个系列的驱动器都具有比较完善的保护功能,当电源发生短路过流的时候能最大限度地保护功率管。KD系列是一种不带保护功能的价格较低的IGBT、MOSFET驱动器,采用变压器隔离,次级采用分时式自给电源,使用方便,能驱动各种单管和半桥、双正激、同步整流电路中的双管。
四、 控制电路
软起动器本质上是一种交流调压装置,用于实现电机的软起动、停机及保护等多种功能。它的核心部分是微机控制电路,该部分的功能是将各种信号进行数学运算和逻辑判断,使控制系统各个部分协调运行。可见,微机控制芯片的性能将对控制器起着决定性的作用。在电气传动系统中,常用的控制芯片有Intel公司的SXC196MC/MD/MH系列,TI公司的TMS320c240x系列,模拟器件(AD)公司的ADMCxxx系列等。在上述芯片中,选择TI公司的TMS320LF2407A芯片。这是因为TMS320LF2407A是一款专用电机控制芯片,满足本系统设计中所要求的微机控制能力,如具备足够大的存储器容量、足够快的运算速度、足够强大的逻辑判断能力和通讯功能等。
自从美国德州仪器公司向市场推出第一代DSP芯片以来,DSP的处理速度和性能不断提高,在价格上从最初的几百美元降到现在的几十美元甚至几美元,其应用前景非常广阔。结合所设计软起动器的要求,从表1比较得到电机控制的微处理器,LF2407为最佳选,因为它的性价比最高。
五、 保护电路
工控系统在运行时,通常都会遇到各种各样的现场干扰,微机控制系统干扰、电源的波动引起的程序飞车和数据丢失,常造成系统的各种误动作或死机,直接影响着系统的正常运行。抗干扰能力是衡量工控系统性能的一个重要指标。看门狗(Watchdog)电路是自行监测系统运行的重要保证,几乎所有的工控系统都包含看门狗电路。
看门狗电路一般有软件看门狗和硬件看门狗两种。软件看门狗不需外接硬件电路,但系统需要出让一个定时器资源,这在系统中很难办到,尤其是在此设计中,三个定时器资源全部用上。而且若系统软件运行不正常,可能导致看门狗系统也瘫痪。硬件看门狗是真正意义上的“程序运行监视器”。
针对目前软起动器的发展现状,采用先进的数字信号处理器DSP为核心构成斩波式软起动器,它的硬件简单,软件丰富,可以方便地实现现代化控制规律和多种功能,可靠性高,调试简单,完全可以作为一种先进的异步电动机启动设备。
参考文献:
[1]毛行奎,张文雄.交流斩波控制调压技术探讨[J].机床电器,2012(2).
[2]周謙之,许海斌,武卫华.交流斩波调压技术及其应用前景[J].应用电力电子技术的变流器,2014(7).
[3]陈超英.PWM型斩波式三相交流电压调节器[J].福建电力与电工,2015(1).
[4]房绪鹏.斩控式交流调压器的几种新型拓扑[J].电力电子技术,2016(1).
[5]刘汉奎,顾建军,徐殿国. 高性能交流电压调节技术的发展概况[J].电工技术杂志,2017(6).
作者简介:程秀玲(1980~),女,内蒙古四子王旗人,内蒙古包头轻工职业技术学院自动化学院,硕士研究生,副教授,研究方向:智能控制;
单水维(1980~),男,河北衡水人,内蒙古第一机械制造集团有限责任公司,硕士研究生,工程师,研究方向:新材料的开发及应用;李兰云(1983~),女,河北邯郸人,内蒙古包头轻工职业技术学院自动化学院,硕士研究生,研究方向:自动控制技术;
李仕慧(1982~),女,山东临沂人,内蒙古包头轻工职业技术学院自动化学院,硕士研究生,副教授,研究方向:材料加工及应用。
