基于三轴加速度传感器的机械故障监测系统的设计与研究*
2019-11-28张子毅骆东松
张子毅 裴 阳 骆东松
(1.甘肃工大舞台技术工程有限公司 兰州 730050)(2.兰州理工大学 兰州 730050)
1 引言
工业生产中机械故障时有发生,人们采用监测机械振动信号的方式来预测机械故障。传统的机械故障检测系统采用单轴传感器作为信号采集单元[1],这样的采集单元只能检测到某一位置的单一方向振动信号,对于复杂机械的检测系统来说单一方向的振动信号是远远不够的[2]。为解决这一问题,本文采用先进的三轴加速度传感器ADXL372作为机械故障监测系统的信号采集器件;完整的监测过程要求系统具有数据分析能力,文献[3]基于WinCE操作系统设计了一种振动分析仪,本文将精简的uC/OS-II系统引入到该检测系统中,并在系统中运行针对三轴数据的处理算法,文献[4]中利用DFT变换分析单轴信号,文献[5]利用EMD方法分析单轴信号,由以上两种方法可知,振动监测系统的数据分析算法大多以单轴算法为主,并由传统的时频分析方法逐渐向较复杂的频谱分解方法过渡,文献[6]以三维频谱的方式呈现机械的振动信号,引出了三轴数据分析的例子。基于以上分析,本文将提出基于三轴加速度传感器的三轴数据处理算法MEMD方法,该算法可以有效地处理振动信号,并从中筛选出故障信息。
2 系统硬件基础
本章将着重介绍系统的硬件部分的两个主要器件:三轴加速度传感器ADXL273和STM32F103C8T6单片机。结合实际需求,通过分析器件的性能,得出器件选型的结果。最后就这些器件设计监测系统的硬件结构图并绘制电路图。
2.1 ADXL273与STM 32F103C8T6介绍
ADI公司于2017年推出三轴加速度传感器ADXL273,采用先进的MEMS技术,该技术将机械结构与电子电路有机的结合在一起,做到了最大程度的集成和精简,其结构如图1所示。

图1 ADXL内部结构
ADXL372最小测量精度为±4g,测量范围为±200g,带宽为3.2kHz,可见相比于其他同类产品,ADXL372有着优越的性能,非常适合应用在振动监测系统之中。另外,其输出类型是数字量,并配有SPI通信接口,可以与单片机直接通信;一般情况下,机械振动的频率范围在十几赫兹到几十千赫兹不等,有时甚至会在两千到三千赫兹之间,许多振动传感器的采样带宽都不符合这一要求,就会导致采集的数据失真,严重影响分析结果;ADXL273的工作模式有休眠模式(工作电流为100μA)和连续采样模式(工作电流为1mA)两种,并且具有唤醒功能,当振动幅值在一定阈值范围内,传感器将进入休眠模式,超过阈值,传感器将被唤醒,进入连续采样模式。因此,ADXL372满足低功耗的需求。
STM32F103C8T6是一款基于ARM Cortex-M内核的32位的微控制器,精简的48脚分装,具备两组SPI通信端口,通信速率为72MHz。STM32F103C8T6作为硬件设备的MCU,可以通过SPI1接口将数据从ADXL372读取出来,并通过SPI2将数据存储到MR25H40磁阻存储器中,该磁阻存储器具备写保护功能,可防止数据意外丢失[2]。
2.2 系统硬件构成及电路设计
通过以上介绍得出系统的硬件结构如图2所示,其他外部硬件包括液晶显示屏、按键等;单片机的预留的总线端口提供与计算机通信的通信功能,数据就可以在计算机中存储,进行更进一步的分析。

图2 系统硬件构成
3 嵌入式系统及程序设计
本章将介绍系统的软件设计,包括uC/OS-II操作系统的剪裁与移植以及系统内程序的架构与思路。
3.1 uC/OS-II操作系统
uC/OS-II操作系统作为一种高效的嵌入式操作系统,具有可移植性好、稳定性高和可灵活剪裁等特点,其软硬件结构如图3所示。
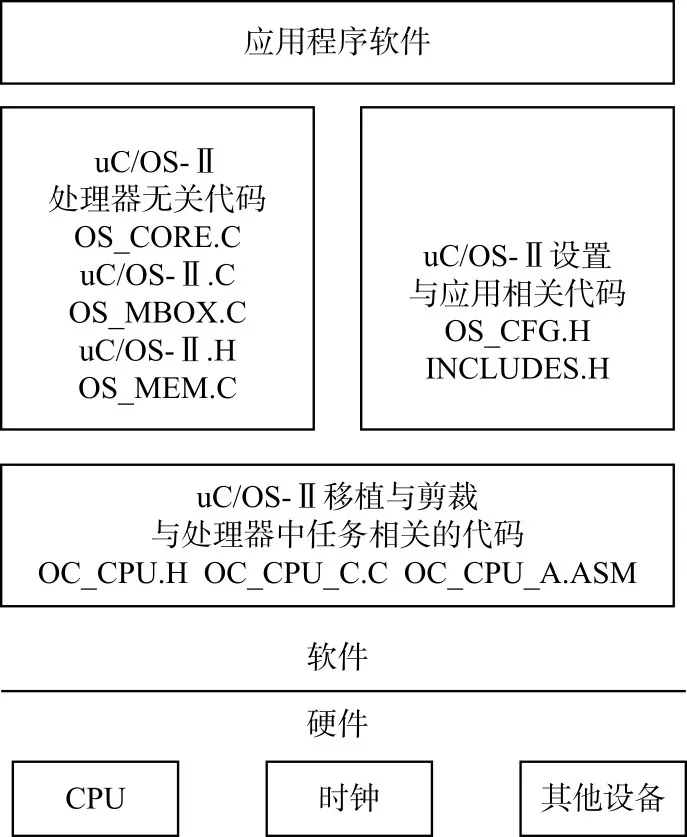
图3 嵌入式系统构成
根据前文介绍,本系统选择KeilμVision4作为软件开发环境,在此软件上,移植方法包括以下步骤。
首先,在KeilμVision4上新建一个工程,并添加启动代码。其次,在Micrium官网下载μC/OS-II的软件工程包,将这些工程包中的代码选择性的添加到工程文件夹下,这也是系统可剪裁的体现。最后,通过修改os_cpu.h、os_cpu_a.asm、os_cpu_c.c着三个文件夹下的内容,就可将μC/OS-II移植到嵌入式处理器STM32F103C8T6中。
3.2 程序设计
操作系统移植成功之后,将在此基础上编写代码,控制外设相互配合协调工作。其软件流程如图4所示。

图4 软件流程图
这里着重介绍对ADXL372的初始化,初始化程序分为以下几步:
第一步,在器件的ID寄存器中读取,判断SPI初始化是否成功,其寄存器地址为0xAD。
第二步,设置采集频率,其寄存器地址为0x3E的最后三位,带宽从200Hz~3200Hz可选。
第三步,设置ADXL372为自动睡眠模式,该模式下传感器在没有监测到振动时自动进入睡眠模式;振动超过阈值,则进入工作模式,寄存器地址是0x3E的第6位。
设置完以上寄存器,DAXL372开始正常工作。读取ADXL372的数据程序如下所示
xAccDataH = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_XDATA_H_REG)<<4;
yAccDataH = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_YDATA_H_REG)<<4;
zAccDataH = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_ZDATA_H_REG)<<4;
xAccDataL = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_XDATA_L_REG)<<4;
yAccDataL = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_YDATA_L_REG)<<4;
zAccDataL = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_ZDATA_L_REG)<<4;
4 振动分析算法
一个完整的振动分析系统离不开算法的支持,本章将在介绍传统时频算法的基础上,以EMD方法为基本方法,研究专门针对三轴数据的MEMD方法。
4.1 时频分析算法
如今的振动分析仪大多都配有简单的时频分析算法,常见的机械故障信号都可以用时频算法从中提取故障信号,如文献[7]中利用FFT变换以及IIP滤波器对振动信号进行分析,其中快速傅里叶变化(FFT)利用如式(1)所示的离散傅里叶变化(DFT)中的WNnk的复共轭对称性和WNnk对n和k的周期性进行简化,如式(2)、(3)所示。

其他的时频算法如幅值谱、功率谱、对数谱和倒谱都以谱布图中的特征判断故障原因[8],以上时频算法在数据处理上虽然有着操作简单,易于执行等优点,但对于夹杂有诸多非线性时变成分的振动信号总有着分析结果不全面等缺点。
4.2 EMD方法
经验模态分解分解方法(Empirical Mode Decomposition,EMD)于1998年由黄锷提出,是一种非常适合处理非线性非平稳信号的方法。该方法依照数据自身的时间尺度特征来分解信号,故具有自适应性。EMD方法的分解过程主要包括以下三个方面:首先,找出原始信号X(t)的极大值、极小值并通过三次样条插值函数拟合出信号的上下包络线。然后,根据上下包络线求出均值函数,记为m1。最后,将均值函数从原始数据中减去,得到新的数据序列h1如式(4)所示:

如果新的数据序列h1还存在负的局部极大值和正的局部极小值,说明这还不是一个本征模函数,还需要继续迭代筛选,直至出现满足条件的本征模函数(Intrinsic Mode Function,IMF),如式(5)所示:

此时记h1k(t)=c1(t),称c1(t)为原始信号X(t)的第一阶IMF。
通过以上工作得出了第一阶IMF,然后将其从原始信号中分离出来,得到下一个待筛选信号即:

对r1(t)重复上述工作,直至信号被分解成多个IMF分量和的形式[9],即:

4.3 MEMD方法
根据上一节介绍,EMD方法将原始数据分解成若干个IMF分量和的形式,每个IMF分量处于不同的频带。但是对于三轴传感器传回的数据,每轴的数据都具有不同的信号成分,在数据分析是会产生模态对其等问题[10],这就需要某种方法可以解决这一问题,达到多轴数据有机融合的目的。
MEMD方法将多维包络的概念引入进来,多维包络将多元信号延空间中不同方向投影,得出了投影信号之后就可以使用算数平均的方法来拟合局部均值函数。以上过程中的空间方向向量决定了局部均值函数的精确程度,方向向量在空间球面中分布越均匀,精确程度越高;反之,精确程度越低。因此,如何确定投影的方向向量就成了MEMD分解的首要问题。
文献[11]对比了均匀角度采样法和基于准蒙特卡洛方法的低差异序列采样法两种方法确定球面上的点集,并得出的出后者优于前者的结论,本文也将利用基于准蒙特卡洛方法的低差异序列采样法确定单位球面上均匀分布的点集。
通过以上讨论,现陈述针对三维信号的MEMD算法思路如下:
第一步,利用基于准蒙特卡洛方法的低差异序列采样法得到一组分布均匀的方向向量X。
第二步,将信号组 v(t)延第 k个方向向量Xk投影,得到投影函数p(kt),其中k=1,2,3,…,l,l表示方向向量的总数。
第三步,找到投影函数的极大值、极小值所对应的时刻tik,其中i=1,2,3,…,n,n表示极值点的数量。
第五步,将以上步骤所得到的对应于l个方向向量的所有多元包络函数求取近似均值函数:

第六步,提取出固有模态函数h(t)=V(t)-M(t),并执行类似EMD方法中的筛选过程,直至找到符合条件的多元IMF分量。
最后重复上述步骤,将原始三维信号分解完备,可表示为

以上是MEMD分解过程,该方法不仅继承了传统EMD的自适应性,而且可以实现三通道的信号分解,非常适合与三轴加速度传感器配合处理数据。
5 结语
本文首先在介绍振动监测系统软硬件结构的基础上对比分析了加速传感器、主控MCU的选型以及嵌入式操作系统的选型和剪裁,其次设计了以三轴加速度传感器ADXL372为采集器件,以STM32F103C8T6为控制核心的系统电路图,并编写嵌入式软件。最后为了更好地分析三轴数据,对比研究了以EMD方法为基础的三轴数据算法MEMD,此算法可将三轴数据有机的融合,有助于数据的综合诊断和分析。
随着计算机科学的发展与完善,如今的振动监测系统将会朝着高精度、大数据的方向发展,这就要求振动分析仪可以与PC数据通信,PC的数据处理就可以基于云平台等大数据分析手段实现数据共享和远程诊断[12]。
