抗阵列流形误差的稳健低旁瓣波束优化设计*
2019-11-28董鹏飞
董鹏飞
(杭州应用声学研究所 杭州 310012)
1 引言
衡量一个波束形成器好坏的指标主要有主瓣宽度、旁瓣级、阵增益、鲁棒性等。这些指标在某一方面反映着波束形成器的性能,但是每个指标并不是独立的,上述指标之间是相互关联相互制约的,有些甚至是矛盾的。如何在这些相互制约的指标之间寻求一个最佳的折衷,就是波束优化设计[1]研究的内容。在波束优化设计研究的过程中,出现了大量的提高阵列稳健性的方法,减小因为误差引起的性能下降。其中,当波达方向不确定时,运用线性约束最小方差波束形成法进行波束优化,对于观察方向失配的情况,具有较好的鲁棒性[2]。对于另一类因为导向矢量失配(如阵列扰动、阵列流形模型误差等)引起的阵列性能下降问题,常用二次波束约束波束形成法去解决。该方法是通过对阵列加权向量的Euclidean范数进行二次约束来实现的。目前,运用二阶锥规划(SCOP)方法[3~4]能够很简单地解决该类问题,因此该类方法得到了广泛应用。
2 抗阵列流形误差的稳健低旁瓣波束形成
实际的工程应用中,一般无法知道精确的阵列流形向量。在阵列流形存在误差的情况下,如果仍然采用理想方法设计权向量,并利用这个权向量去做波束形成,那么得到的波束图会出现严重的畸变,波束旁瓣常常会升的很高。为解决这一问题,通常采用抗阵列流形误差的旁瓣控制波束设计方法[5]。这个方法是通过对加权向量的范数施加一个约束,来提高波束形成器的稳健性,如:‖‖w≤ς0。然而,在运用该方法的过程中,往往无法根据阵列流形的不确定范围来计算最优加权向量的约束值ς0。
实际的阵列流形和理想的阵列流形之间总是存在误差的,对此我们将真实的阵列流形

其中,av(θk)表示理想的阵列流形,Δ(θk)表示阵列流形误差,M表示阵元数目。真实的阵列流形矢量 a͂v(θk)在实际应用中往往是未知的,它和理想条件下的阵列流形矢量av(θk)之间是有误差的,且这个误差Δ(θk)是未知的复向量。
对于理想的最低旁瓣波束形成器,即在给定主瓣宽度的条件下,使旁瓣级最低[6]。主瓣宽度越宽,能够获得的旁瓣级越低。理想最低旁瓣波束形成可以表达为约束优化求解问题,如下:
式中,U(θ)表示阵列流形不确定集。真实的阵列流形矢量被u替代,从而使得上式所表述的低旁瓣波束优化问题能够转化为二阶锥规划问题[7~8],利用Matlab中的SeDuMi工具箱很容易求解[9]。
2.1 稳健低旁瓣波束形成
通常在进行低旁瓣波束设计时,重点研究的是波束主瓣与旁瓣级的问题,并不关注波束形成的稳健性。然而在工程实践中,常常希望阵列的波束与期望波束相比较,不发生畸变,这就需要在进行低旁瓣波束设计时,增加波束稳健性的约束。波束稳健性约束方法[10]有很多,其中白噪声增益约束法相对比较简单,该方法的数学表述为

式中,δ为阵列加权向量范数的上界。
同样也可以对阵列流形误差Δ(θk)施加约束,表示如下:

式中,εk为阵列流形误差的范数,且εk<<0。则阵列流形不确定集U(θ)可以表述为椭圆不确定集U2(θ):

则有u(θ0)∈U2(θ0)。下面以2-范数约束为例,进一步研究稳健性约束优化方法。
式(3)的约束条件可作以下变换:
上式取等号的条件为
上式成立的条件为

其中代价函数是对旁瓣的设计要求,而约束条件是期望方向的设计要求。该优化问题不是凸优化问题,但是可以通过转换,将其变成凸优化问题。由于对权向量w进行任意相位的旋转,的值不发生变化,因此,假设wopt是式(13)的一个解,我们可以对其进行相位旋转,直到为实数,而不影响代价函数的值。由上述分析可知,式(13)的一个解可以写成:
上式所表述的问题即为基于L2(2-范数)准则生成的凸优化问题,称之为 L2方法[11~12],将其转换为二阶锥规划的形式即可利用SeDuMi工具箱很容易求解。
上面是在假设已知阵列流形误差范数的上界条件下,利用2-范数约束得到的L2方法。还有一种情况,可以假设阵列流形向量误差的每个元素的上界已知,可以利用1-范数约束推导的到L1方法。基于L1(1-范数)准则的设计原理同L2方法基本类似,在此不做赘述,直接给出其表达式:
式中,δm为阵列流形向量误差每个元素的上界,θ0表示的是期望方向,而θi是旁瓣区域所对应的角度。
2.2 仿真分析
工程实践中,阵列流形向量不可能是理想的,有很多原因会引起阵列流形向量的误差,很典型的就是阵元的位置误差。我们以图1所示的16元扩展阵为例做简单分析,假设阵元误差标准差为0.02时,阵元实际位置和理想位置的关系如图1。
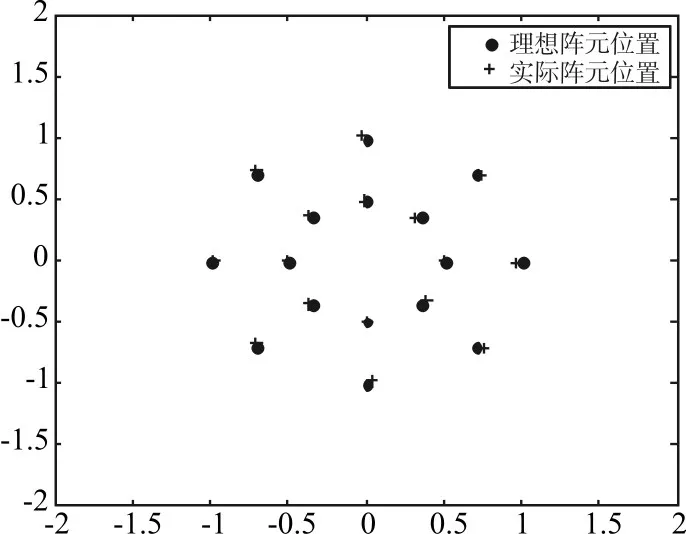
图1 理想阵元位置和实际阵元位置对比
由于实际中阵列的尺寸一般较大,将会导致实际阵元位置严重偏离理想阵元位置,如此大的阵元位置误差,势必对波束优化设计造成较大的影响。为直观说明阵元位置误差对稳健波束形成的影响,利用该16元扩展阵进行说明。当阵元位置误差的标准差为0.01、0.015、0.02和0.025,波束形成情况如图2~图5。
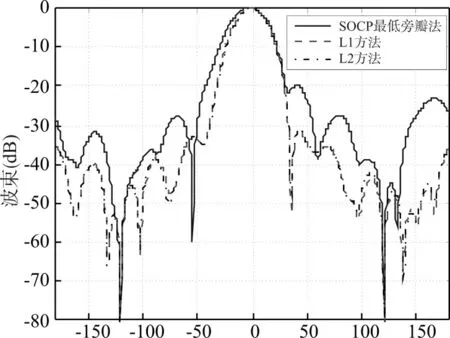
图2 标准差为0.01时的阵列指向性图
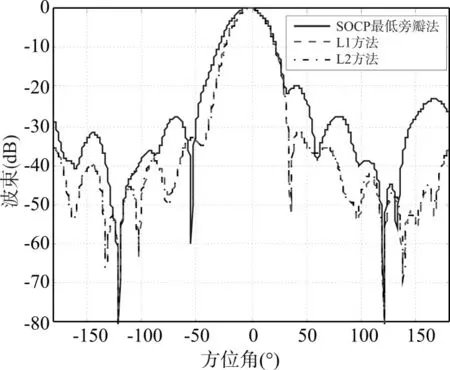
图3 标准差为0.015时的阵列指向性图
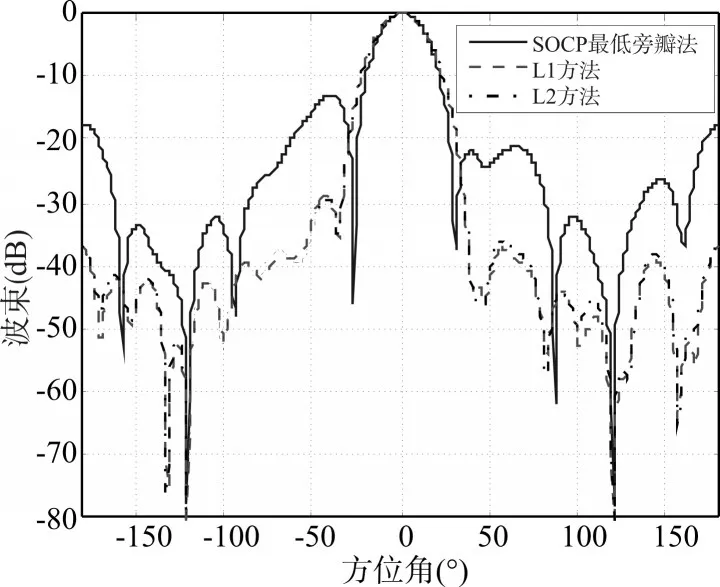
图4 标准差为0.02时的阵列指向性图
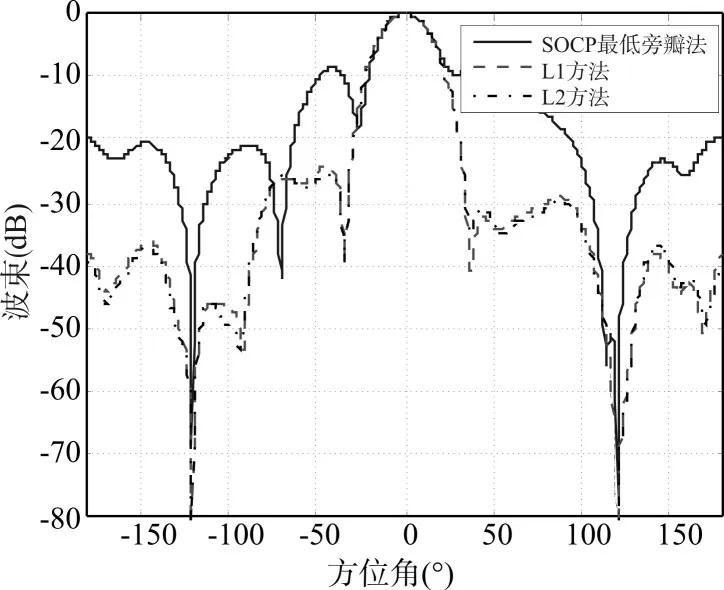
图5 标准差为0.025时的阵列指向性图
分析以上四种位置误差情况下阵列波束可以看出,当阵元位置误差越来越大时,采用SOCP最低旁瓣法(即理想最低旁瓣法)形成的波束性能越来越差,波束输出与期望波束差别较大,特别体现在旁瓣级上,旁瓣变得较高,达到了-10dB(相同条件下,在阵元位置误差为0.01的情况下旁瓣级为-28dB)。利用L1方法和L2方法设计的波束基本一致,具有较强的稳健性,具体表现为当阵元位置误差越来越大时,其波束响应的旁瓣级也会相应升高,但是基本上是在-30dB左右变化,远远低于理想最低旁瓣法设计的波束。这一结果验证了抗阵列流形误差的稳健性波束形成设计L1方法和L2方法具有较好的稳健性。
3 结语
本文从实际应用中所面临的问题(在无法精确知道阵列流形向量的情况,将导致波束形成器性能的改变)出发,针对引起波束形成误差的原因,分析了抗阵列流形误差的稳健低旁瓣波束形成方法—L1方法和L2方法。最后在16元扩展阵的条件下分别对SOCP的L1方法和SOCP的L2方法进行了仿真实验,验证了抗阵列流形误差的稳健性波束优化设计L1方法和L2方法具有良好的稳健性,能够获得较窄的主瓣和更低的旁瓣级。
