基于AHP-可拓学的无人机可靠性综合评价模型研究*
2019-11-28韩建立张光宇
葛 峰 韩建立 林 云 张光宇 高 松,3
(1.海军航空大学 烟台 264001)(2.92419部队 兴城 125106)(3.91115部队 舟山 316000)
1 引言
可靠性是指装备在规定的条件下和规定的时间内,完成规定功能的能力[1]。在如今的军事领域中,无人机具备体积小巧、价格低廉、运用便利、生存力强等长处,因此在航空侦察、通信中继、模拟靶标、电子干扰等领域有着广泛的应用。随着无人机越发广泛的应用,其可靠性评估问题成为该领域研究的热点。
本文通过可拓学物元模型和集合理论对无人机的可靠性进行评估。可拓学由中国研究员蔡文首先提出,从定性和定量两个方面使用形式化设计考虑解决问题的规律与方法[2]。可拓学的理论基石是物元理论和可拓集合理论,物元理论将对象形式化用以描述对象的各特征,可拓集合理论利用关联度将定性分析转化为定量分析,目前在可拓集合理论基础上建立的可拓评价方法已经成为可靠性评估的重要方法,现已在许多领域得到了广泛的应用并取得较好的效果[3~4]。本文在综合考虑各影响因素的前提下建立无人机可靠性评估的指标体系。结合指标体系,引入可拓学物元理论建立无人机可靠性评价模型,并利用关联度函数确定无人机各指标的关联度,通过层次分析法确定无人机各个评估指标之间的权重系数。最后,利用无人机可靠性评价模型对两型无人机的可靠性等级进行了评估,为无人机可靠性评估提供了一种新办法。
2 建立无人机可靠性评价指标体系
无人机是较为典型的天、地协同的综合系统,其可靠性首先决定于设计中赋予的固有值,其次取决于无人机实际使用、维修质量及故障对系统功能的危害与影响,因此其可靠性评价应综合考虑各影响因素。同时,遵循完整性、方便性、可比性、先进性的原则,无人机可靠性评价指标可以考虑以下4项:平均故障间隔飞行小时(Mean Flying Hours Between Failures,MFHBF),平均修复时间(Mean Time to Repair,MTTR),任务成功率(Mean Complete Success Probability,MCSP),每飞行小时需维修小时(Mean Maintenance Hours/Flight Hour,MMH/FH)[5~6]。以上 4 个评价指标构成了无人机可靠性评价体系,如图1所示。

图1 无人机可靠性评价指标体系
3 可拓学评价模型的建立
设无人机可靠性评估指标有n个,为c1,c2,…,cn,将无人机可靠性评价分为 j个等级,j=1,2,…,m ,由此建立物元模型[7]:
该公式中,Nj是无人机的第 j个评价等级,ci是评价等级Nj的可靠性量值指标,xji是第 j个评价等级相对于评价指标的取值范围。
3.1 确定物元模型的经典域
上式中,Nj是与评价指标对应的取值范围;即为各个评价等级对应于特征的取值范围。
3.2 确定物元模型的节域
上式中,节域Rp为评价指标在所有评价等级的值域,xpi是对应评价指标的量值范围,即< api,bpi> 。
3.3 确定待评物元矩阵
对待评无人机,将经分析处理得到的各评价指标用物元R0表示,称为待评物元。

上式中,P0为待评事物,Xi为需评无人机对应于评价指标的量值,即为无人机的可靠性评价值。
3.4 确定各评价指标权重
层次分析法适用于复杂层次结构的多目标决策问题,能够统一处理决策中的定性和定量因素,具有逻辑性、实用性和系统性,可以准确得到各因素间的权重系数[8~9]。本文引入此方法来得出指标体系中各指标之间的权重。
3.4.1 构造各评价指标之间的判断矩阵
判断矩阵各要素值是无人机四个可靠性评价指标互相之间重要性的体现,根据1-9标度法确定判断矩阵D[10]。
3.4.2 层次单排序及一致性检验
判断矩阵D的特征根为AD=λmaxW的解W,经归一化后可得该层次对应要素对于上层要素的权重ωij。为确保评价指标的一致性,防止产生相互矛盾的结果。计算判断矩阵的CI值和平均随机一致性指标RI的比率CR,其中均一致性指标RI可查表1得到。如果CR<0.10,那么判断矩阵具备可行的一致性,反之则要对判断矩阵进行进一步的修正,使其可行。

表1 平均随机一致性指标
3.5 确定待评无人机的关联度
3.5.1 待评无人机关于各等级关联度的确定
根据可拓学集合论,无人机第i个可靠性指标属于第 j个等级的关联度函数为
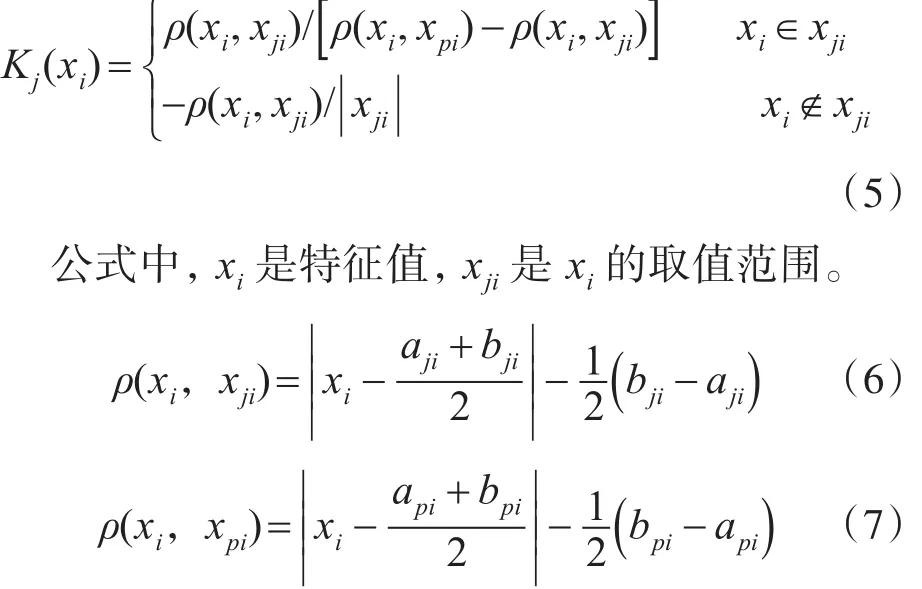
3.5.2 确定待评无人机综合关联度

4 实例分析
将无人机的可靠性水平分为优秀、良好、中等、较差四个等级。依据某部在其两型无人机实际使用中收集的相关数据,如表2所示,来说明基于可拓学理论的可靠性综合评价模型在无人机可靠性评价中的应用。

表2 某部两型无人机可靠性数据
4.1 确定物元模型的经典域
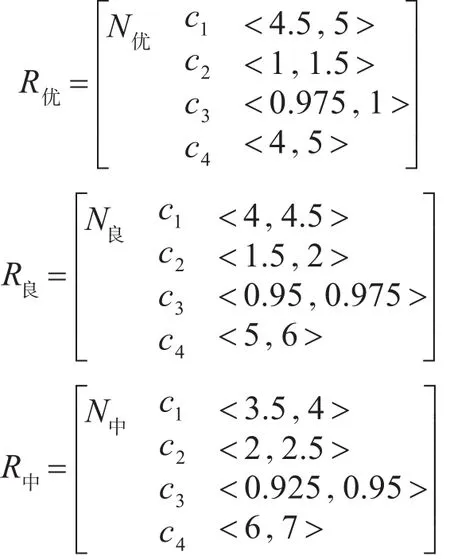

4.2 确定物元模型的节域

4.3 确定待评物元矩阵

4.4 确定各评价指标权重
根据第1节确定的无人机可靠性评估的4个指标,根据1-9标度法来构造各个评价指标间的评判矩阵D:

通过计算,可以得到上述矩阵的特征向量和最大特征根。W=[0 .332 0.174 0.911 0.174],最大特征根λmax=4.0042。而后,对其进行一致性检=0.0014,由表1得到 RI=0.90,那0.0016<0.10,结果表明,该判断矩阵具备可行的一致性。归一化处理特征向量W,从而确定四个评价指标的权重值[11]:

4.5 确定待评无人机的关联度
根据式(5)~(7),运用Matlab软件进行计算,可得:
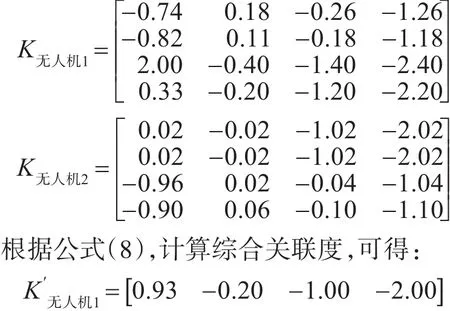

根据最大隶属度原则和计算得到的综合关联度结果,可知无人机1的可靠性评价等级为优秀,无人机2的可靠性评价等级为良好。
5 结语
本文综合考量无人机固有可靠度、使用故障及维修能力等影响要素,建立了评价指标体系,应用可拓学理论建立了无人机可靠性评价模型,利用层次分析法得到评价指标权重,引用关联度的概念得出无人机可靠性等级,为无人机可靠性的评价提供科学依据[12]。通过两型无人机的评价实例验证了模型方法的有效性,证明该模型具有良好的可行性。
