基于最优选点数的多胞LPV建模及其鲁棒控制研究*
2019-11-28郑亚龙徐文萤
郑亚龙 江 驹 徐文萤
(南京航空航天大学自动化学院 南京 211000)
1 引言
相对于传统飞行器,高超声速飞行器具有飞行包线大、参数快时变以及由飞行环境复杂等因素造成的参数强不确定性等特点,因此其控制系统必须能够适应较大参数变化范围以及大的参数不确定性。传统的增益调参方法设计简单且容易实现,但大包线内的调参过程极其繁杂,并且无法从理论上保证系统在全包线的稳定性和性能指标。线性变参数(Linear Parameter-Varying,LPV)控制是一种新颖的增益调度技术,克服了传统增益调参的控制器插值问题和稳定性问题,同时保证了工程实现性。
目前,基于LPV的变增益控制策略在航空航天领域得到了广泛应用[1~4]。针对全包线控制器的设计大多数采用传统的增益调参方法,即采用多个线性控制器来满足全包线的控制需求。文献[5~6]分别按照动压等高线和高度、马赫数进行包线划分,其很大程度上依赖设计者经验;另外,传统的基于Lyapunov函数的LPV控制方法的凸分解策略和自增益调节策略[7~8]采用系统参数的几何距离作为依据,无法准确体现系统动态特性之间的关系,且在对象顶点模型求取时没有考虑模型的参数不确定性,控制器鲁棒性较差。
基于上述问题,本文提出了一种基于间隙度量的鲁棒LPV控制方法,利用间隙度量理论分析得到大包线模型特性变化规律,指导完成了包线划分,并根据包线划分结果建立多胞LPV系统,同时考虑高超声速飞行器模型参数存在的不确定性,定义不确定多胞LPV系统,在此基础上设计鲁棒控制器,验证了方法的有效性。
2 高超声速飞行器的LPV建模问题描述
2.1 模型描述
设某高超声速飞行器在平衡巡航飞行条件下的运动方程为
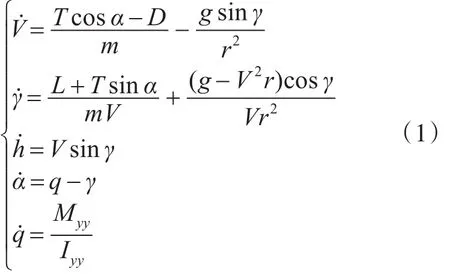
其中:
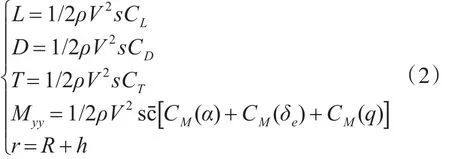
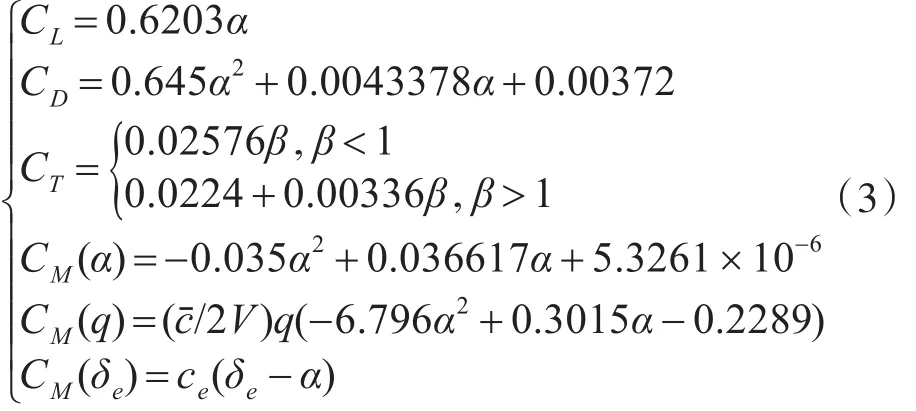
气动参数表示为
发动机二阶系统模型为

2.2 LPV建模
考虑如下式所示的非线性系统:

对于它的任一个平衡点采用一阶Taylor展开,得到:

式中,fe(x,u)表示系统位于平衡点处的取值,xδ=x-xe,uδ=u-ue,xe和 ue分别表示平衡点状态和平衡点输入。
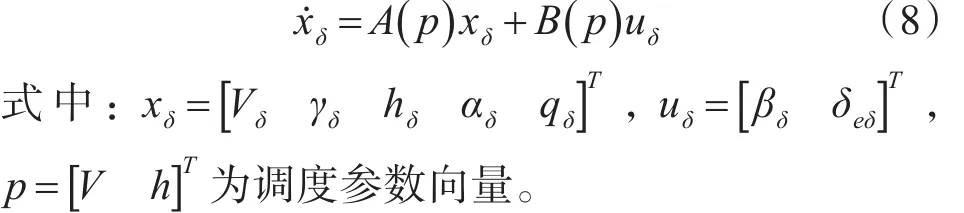
定义如下偏差变量:Vδ(t)=V(t)-Ve(V,h),其余同理。其中,Ve(V,h)等均为状态变量在系统平衡点处的取值,则原运动方程可表示为

将得到的一系列LTI模型进行数值拟合,即得到高超声速飞行器的LPV模型,记为
高超声速飞行器的LPV建模中,主要存在一个问题,就是如何确定LPV模型平衡点的个数。传统LPV建模中,平衡点的个数都是基于经验法选取,并没有统一的标准和理论依据。因此需要确定一个平衡点的选取准则,在同时考虑建模精确度和计算复杂度的情况下确定一个最优的平衡点选取个数。
下面引入间隙度量理论,确定最优的平衡点个数,进而建立LPV模型。
3 基于最优选点数的多胞LPV建模
3.1 间隙度量理论概述
间隙度量理论由Zames和El-Sakkary引入到控制领域中,目的是更精确地描述线性系统之间的差异程度。
定义 1[9~10]设 G1,G2∈ Rn×m(s)是具有 m 个输入 n个输出的传递函数阵,(D1,N1)和(D2,N2)分别为G1和G2的规范右互质分解,则G1和G2之间的间隙度量为

式中
由间隙度量的定义,如果δ接近于0,则表明两个系统动态特性近似。因此,间隙度量值的大小可反映模型变化的大小,依此可作为飞行包线划分的依据。
为了更加清晰地显示间隙度量值的物理意义,我们得到如下间隙度量值的变化曲线,如图1~图2。
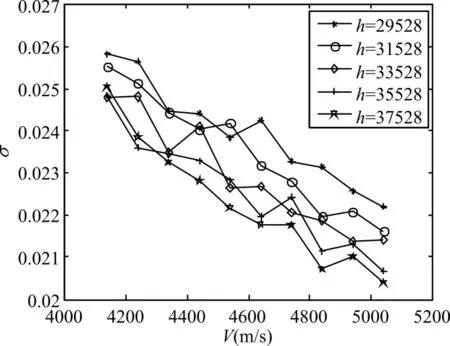
图1 相同高度下间隙度量值变化曲线

图2 相同速度下间隙度量值变化曲线
从上图可以看出,尽管是相同的速度间隔或者高度间隔,但相邻两平衡点之间的间隙度量值并不一样,即有必要依据间隙度量值选取平衡点个数。
3.2 建立优化模型
将系统的间隙度量理论引入到LPV建模过程中,从而定量的描述模型之间的差异程度,更好地选取平衡点的个数。
但同时考虑到,平衡点的个数同样影响着控制器的计算复杂度,因此,结合一般的针对LPV模型的控制器设计,对线性矩阵不等式(LMI)的计算复杂度进行分析。根据文献[11],求解LMI的计算复杂度为Ncost=O(n2m2N+nm3N),其中,n表示状态空间的维数,m表示系统矩阵的块对角元素的个数。因为n和m皆为已知常数,所以线性矩阵不等式的运算复杂度与平衡点的个数为一次线性关系。
按照当前系统与顶点系统的间隙度量值最小和计算复杂度最低的指标对系统LPV建模平衡点个数进行优化,建立优化目标函数如下:

式中,nV,nh分别表示速度和高度方向上划分的平衡点的个数,σˉ表示间隙度量平均值,k为权系数,统一前后两部分的量级。
取不等式约束为

具体的优化策略如下:
对于任意的平衡点选取个数nV×nh,计算所有相邻顶点之间的间隙度量值;
对符合不等式约束的nV,nh,最优平衡点选取个数可由式(10)优化得到。
实践证明“导游天下”APP、云班课平台将视频学习、课堂讨论、测验、互动评价等教学方式与课前、课中、课后的教学过程融为一体,有效组织了整个课程教学的实施,轻松解决教学难点,保障学习的效果和实用性。“教”与“学”的每个步骤和结果经平台记录,形成课程“大数据”,其分析结果可与以往教学情况做比较,有效指导教师教学和学生学习,使“教”与“学”有的放矢、事半功倍,充分体现信息化学习的强大优势。动画游戏等信息资源的使用,将知识技能融为一体,让教学变得节能高效。
3.3 建立基于最优选点数的LPV模型
选取高超声速飞行器速度变化范围为4090.3m/s~5090.3m/s ,飞 行 高 度 变 化 范 围28528m~38528m,取权系数k=0.01,图3给出优化函数的变化曲线。
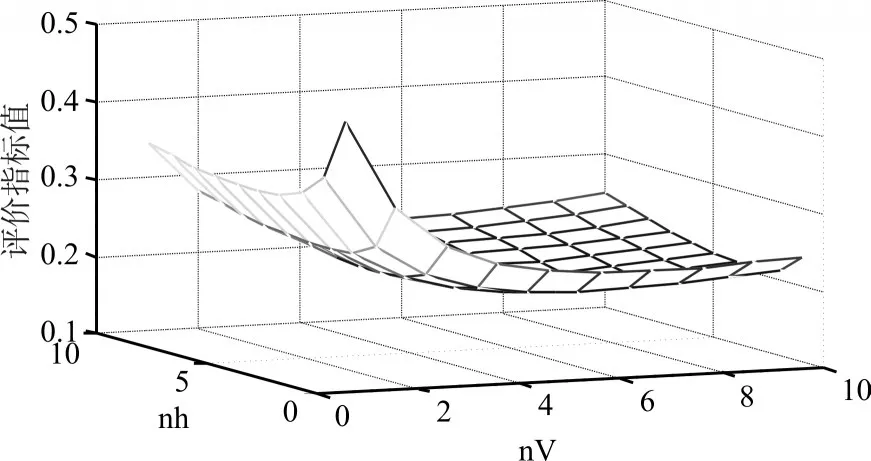
图3 评价指标随平衡点个数的变化曲线
最终我们得到优化结果为nV=3,nh=6,即在速度方向上划分为3个速度值,高度方向上划分为6个高度值,包线内共得到18个平衡点。通过第一节介绍的雅可比线性化方法,可以得到18个标称点以及相应的18个LTI系统(状态矩阵可表示为(Ai,Bi,Ci,Di),i=1,2,…,18),对上述LTI进行插值拟合,最终可得到高超声速飞行器LPV模型:

3.4 仿真分析
为了验证我们所建立的LPV模型的有效性,在速度变化范围4090.3m/s~5090.3m/s,飞行高度变化范围28528m~38528m内任取一点,将基于最优选点数的LPV模型,以及传统LPV模型,与非线性模型在该点的平衡状态的雅可比线性化矩阵进行伯德图比较。
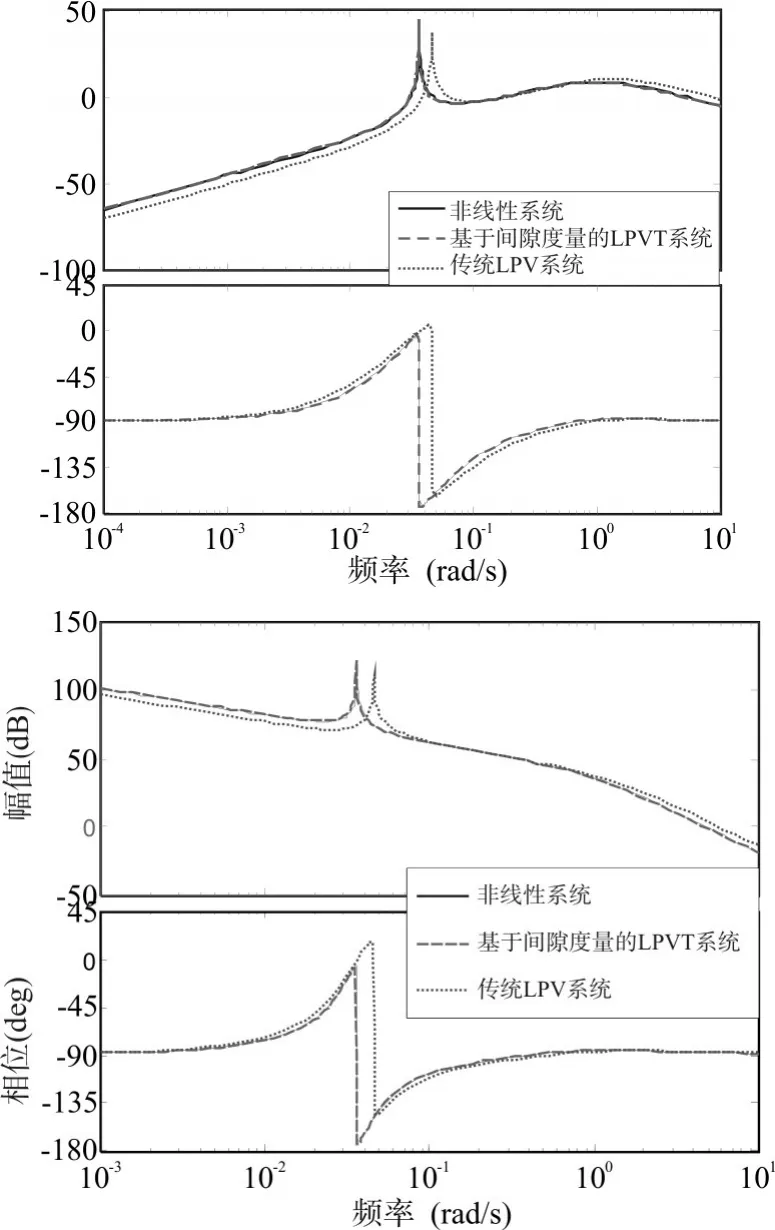
图4 LPV系统与非线性系统伯德图比较
仿真可以看出,基于最优选点数建立的LPV系统的伯德图曲线与原始非线性系统在该点线性化后的伯德图曲线基本吻合,而传统LPV建模得到的伯德图则与其存在一定偏差。这表明由最优选点数建立的LPV系统可以更好地复现原始非线性系统的特性。
为了进一步说明该建模方法有效性,对基于最优选点数建立的LPV模型进行鲁棒控制器设计。
4 鲁棒控制器设计
4.1 控制问题描述
针对上一节建立的LPV模型(11)首先进行多胞转化:设紧集 Pθ⊂ℜ3n:θ∈Pθ,∀t>0可以看作是一个由凸包定义的多胞型:

式中N为顶点个数。通过定义上述多胞型,系统就可以用顶点处LTI模型的线性组合来表示,也就是多胞LPV模型

我们的目的就是要寻找一个常数矩阵K∈ℜn×2n,使得反馈控制输入:

能使闭环系统渐近稳定。
4.2 不确定性分析
事实上,由于线性近似误差和其他的一些不确定项,顶点 Pi:=(Ai,Bi),i=1,2,…,N 存在参数不确定性。

式中,(Aˉi,Bˉi)是在 N 个不同的点计算得到的标称顶点。尽管通过增加顶点个数N,可以更加逼近系统的非线性特性,但同时也增加了计算复杂度和一些没必要的计算。
根据式(14)和LPV描述式(13),闭环系统可以表示为
定义Δi为第i个顶点闭环模型处的参数不确定性:

将不确定性式(15)代入式(16),系统变成如下形式:

式中:

是第i个顶点模型的标称系统矩阵。

可以看作是整个闭环系统的多胞参数不确定性。
定义1 将包含参数不确定性Δ的多胞系统式(19)称为不确定多胞LPV系统。
定义2 如果满足任意顶点处的不确定性不超过与其他顶点之间的距离,则称该系统是多胞主导的。即

4.3 鲁棒控制器设计
基于以上条件,在接下来的定理中给出了系统式(18)鲁棒稳定的充分条件。
定理1不确定多胞LPV系统是渐近稳定的,当且仅当存在正定对称的矩阵 X=XT>0,Y=YT>0,以 及 M 使 得 对 所 有 的i∈{1,2,…,,M},满足下面的LMIs:

对足够大的γ有

其中Q=X-1YX-1,P=X-1。如果存在这样的解,则控制器的增益可以写成:

5 仿真实验
对高超声速飞行器巡航段进行仿真验证。设计仿真条件:高超声速飞行器初值V0=4590m/s,h0=33528m,指令信号为Vc=40m/s,hc=60m,得到速度和高度的变化曲线。过程中给飞行器模型加入一定的参数摄动,分别假设大气密度ρ的摄动|Δρ|/ρ0=0.03 、俯 仰 力 矩 惯 性 积 Iy的 摄 动|ΔIy|/Iy0=0.03、俯仰力矩系数中的参数ce的摄动|Δce|/ce0=0.03、翼弦长 c的摄动 | Δc|/c0=0.03。对比分析考虑参数不确定性和未考虑参数不确定性情况下两种控制器的仿真效果,如图5~图6所示。
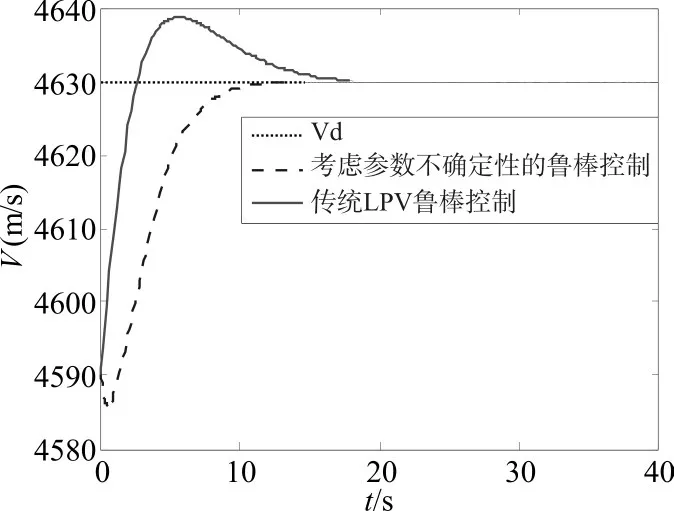
图5 速度变化对比曲线
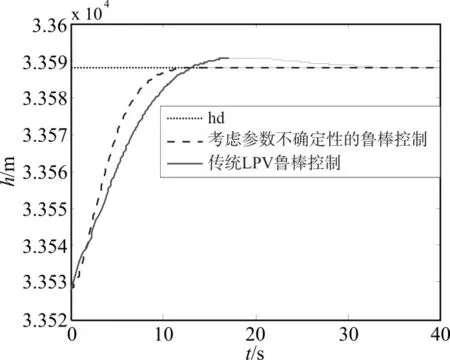
图6 高度变化对比曲线
由图5和图6可以看出,在建立LPV模型过程中,考虑顶点模型的参数不确定性,设计出来的鲁棒控制器具有更好的动态跟踪性能,验证了算法的正确性。
6 结语
1)间隙度量的理论被应用到LPV建模过程中,建立了高超声速飞行器纵向模态的多胞LPV模型,在同时考虑平衡点个数和控制器复杂度的情况下,设计了优化模型,解得最优的选点数,并基于此设计多胞LPV模型。基于最优选点数的多胞LPV建模相比于传统的建模方法保守性更低小,大包线内系统性能更趋于一致,也有利于降低飞行器控制系统设计的保守性;
2)在求取多胞顶点模型时充分考虑模型参数的不确定性,使得基于不确定多胞LPV模型设计的鲁棒控制器具有更好的性能,在高超声速飞行器存在较大参数不确定性的情况下仍能保证系统的稳定性。
