基于新的无标度区确定方法求取分形路面不平度的分形维数*
2019-11-25华徐凯何培松
黄 华徐 凯何培松
(1.南京斯诺森汽车设计有限公司上海分公司,上海200120;2.广西机电职业技术学院,广西 南宁530007;3.广西玉柴机器股份有限公司,广西 玉林537005)
1 W-M函数生成分形路面不平度
1.1 W-M函数
W-M函数最早是由德国数学家维尔斯特拉斯发现的,后经M.Majumdar和B.Bhushan修正得到了M-B模型,用来表征工程表面的具有分形特征的轮廓,此模型也常常称作W-M函数.其形式如下:

式中,Z(x)为随机表面轮廓高度;x为轮廓的位置坐标;G为幅度特征尺度;D为分形维数;Nl、Mu为整数;γn空间频率,考虑到表面平整度和频率分布,γ通常取1.5,n∈[Nl,Mu].最小空间频率由采样长度决定,若采样长度为L,则最小空间频率γNl=1/L;最大空间频率γMu由采样频率F s确定,[1]γMu=Fs/2,采样频率Fs的取值需满足采样定理.
式(1)的连续功率谱密度表达式为:[2]

式中,ω是空间频率.
1.2 路面不平度
路面不平度作为车辆系统输入的主要激励源,对车辆的振动、结构的疲劳特性影响较大,一直是人们研究的重点对象.经研究发现,随机路面不平度作为一种不规则的、自相似性的几何集,具有明显的分形特征.[3]
根据1984年国际标准化组织在文件ISO/TC 108/SC2N67提出的“路面不平度表示方法草案”和国内标准GB 7031《车辆振动输入—路面平度表示》,路面的统计特性用功率谱密度表示,两文件建议其表达式为幂函数形式.形式如下:[4]

式中,n为空间频率(m-1),它是波长的倒数,表示每米长度中包括几个波长;n0为参考空间频率,n0=0.1 m-1;G q(n0)为参考空间频率n0下的路面功率谱密度值,称为路面不平度系数,单位是m3;w为频率指数,为双对数坐标上斜线的斜率,它决定路面功率谱密度的频率结构.另外,文件按照功率谱密度的不同将路面不平度分为8个等级,频率指数w=2.
1.3 W-M函数生成分形路面不平度
基于分形维数的求解方法中的功率谱密度法,[5]通过式(2)和式(3)可用W-M函数生成分形路面不平度.A级和C级分形路面不平度如图1和图2所示.参数设置如表1所示.

图1 A级分形路面不平度Fig.1 Roughness of Grade A fractal road

图2 C级分形路面不平度Fig.2 Roughness of Grade C fractal road

表1 分形路面不平度仿真参数Tab.1 Simulation parameters of fractal road roughness
求取分形路面不平度的功率谱密度与标准功率谱对比,结果如图3和图4所示.由图3和图4可知,基于W-M函数生成的分形路面不平度反映了标准路面的统计特性,有较高的精度.

图3 A级分形路面不平度的功率谱密度与标准谱的对比Fig.3 Comparison of power spectral density of Grade A fractal road roughness with standard spectrum

图4 C级分形路面不平度的功率谱密度与标准谱的对比Fig.4 Comparison of power spectral density of Grade C fractal road roughness with standard spectrum
2 结构函数法求分形路面不平度的分形维数
2.1 结构函数法
结构函数法常用于粗糙面分形特性的分析和分形特征参数的求取,其定义为:[6]

离散化之后,进一步为:[7]

式(5)和式(6)中,S(τ)为结构函数;(τ)=n△l,n=1,2,3,…,N-1;△l为采样距离间隔;〈·〉为差方的算数平均值;Z i为表面轮廓曲线的离散点,i=0,1,2,3,…,N;将S(τ)和τ用对数坐标表示,进行线性回归,得到直线方程,设其斜率为K,则表面轮廓曲线的分形维数为

基于上述分形路面不平度,采用结构函数法求取分形路面不平度模型的分形维数,在将分形路面不平度的标度律,进行线性回归分析,拟合直线方程之前,需首先确定无标度区.本文提出了一种新的无标度区确定方法.
2.2 无标度区确定的新方法
2.2.1 无标度区的定义
测度与标度在双对数坐标呈现直线的区域称为具有分形特征的尺度区域,也称作无标度区.[8]无标度区越大,说明曲线具有较多层次的自相似结构,而在在无标度区之外应用分形理论是没有任何意义的,同时,无标度区也是判别轮廓是否具有分形特征的重要参数.
2.2.2 确定无标度区的方法
目前确定无标度区的方法很多,有人工判定法、相关系数法、强化系数法、拟合误差法、分维值误差法和自相似比法等.[9]本文提出了一种新的无标度区确定方法,暂且称之为“育苗法”.
2.2.3 新方法的原理和实现过程
根据分形理论,具有分形特征的理想曲线,存在无限小细分的自相似结构,在无标度区上表现为无限大范围内的线性关系.而在实际自然界中,不存在理想的分形曲线,工程粗糙面表现为一段范围内的无标度特征,因此,此区域内的标度与测度呈现良好的线性度.基于此,将双对数坐标下的测度和标度构成的数据点排列在一维数轴上,以一定的规则选择一部分数据点,然后以这些数据点向两端扩展,计算这些数据点的相关系数和方差,在满足一定的阈值下,包含较多数据点的区域,应为无标度区.
基于上述理论和思想,其实现过程是这样的,将双对数坐标内的数据点(τ,S(τ))看作排列在一维数轴上的点的集合.以等同的2个数据点为间隔,选择一系列点,然后将这些选中的数据点作为“种子”标记在数轴上.以各个“种子”为中心,向数轴两端外扩,每次外扩数量为2个数据点,计算各个“种子”区域内的相关系数,在满足相关系数阈值下,再次外扩2个数据点,直至出现相关系数不满足阈值.循环次数最多的“种子”包含的标度个数越多,自然标度区越大.在实际循环计算过程中,数据点外扩到数据轴端点之后应停止此方向端的外扩,只进行另一方向端的外扩.其实现过程可以描述为以下4个过程:
1)播种过程.
此过程实际上是将数据点进行分段处理,每段内有个标记的数据点,此点称作“种子”,此过程也称作“播种过程”,其标记结果如图5所示.

图5 数据点的标记过程Fig.5 Marking process of data points
2)“种子”自由生长过程.
此过程描述了各数据段不断进行循环计算相关系数的过程,其中不满足相关系数阈值的数据段不再参与下次循环计算,此过程以种子为中心,数据段不断外扩,似种子的自由生长,满足条件的不断生长,不满足生长条件的“死亡”.其生长过程如图6所示,图中实弧线表示第一次数据点外扩,虚弧线表示第二次数据点外扩,计算各数据段的相关系数的过程.

图6 各数据段循环计算的过程Fig.6 The process of cyclic calculation of each data segment
3)培植过程.
培植过程主要是处理数据段外扩出现到达数轴端点问题.在“种子”生长到数轴端点时,此端点方向应停止生长,而另一侧保持外扩相同的个数的数据点进行生长,直到不满足相关系数阈值,其流程如图7所示.
4)选苗过程.
选苗过程是“育苗”方法的核心步骤,主要是用来判断各个“种子”的生长的区域能否成为无标度区的过程.具体过程为:根据过程1)~3)的计算结果,按照各个“种子”停止生长时包含的数据点个数由小到大的顺序进行排列,同时标记出包含多个数据点的 “种子”对应的相关系数、双对数坐标中测度的方差以及标度的上、下限,从这些数据可确定出无标度区.
“育苗”方法的流程图,如图8所示.
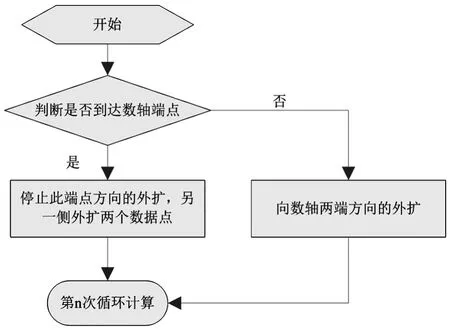
图7 数据外扩到数轴端点的处理过程Fig.7 The process of data expansion to the endpoint of the number axis

图8 “育苗”方法流程图Fig.8 Flowchart of"nurturing"method
2.2.4 仿真结果分析
根据结构函数法,采用“育苗”方法确定无标度区,A级和C级分形路面不平度的标度律以及拟合直线如图9和图10所示.
根据图9和图10的拟合直线的斜率,结合式(6)求取的分形维数如表2所示.

图9 A级分形路面不平度的标度律和拟合直线Fig.9 The scaling law and fitting line of Grade A fractal road roughness

图10 C级分形路面不平度的标度律和拟合直线Fig.10 The scaling law and fitting line of Grade C fractal road roughness

表2 “育苗”法确定的无标度区求取的分形维数Tab.2 The fractal dimension obtained from the scale-free region determined by the"nurturing"method
3 人工观测方法
为了对比验证“育苗”算法的准确性,采取人工观测的方法确定无标度区,求取的分形维数如表3所示.通过对比表2和表3可知,“育苗”方法作为一种新的思想和方法在确定无标度区和求取分形维数上具有较高的准确性,且实现了计算机自动处理,提高了计算分形维数的效率.

表3 人工观测的方法确定无标度区求取的分形维数Tab.3 The fractal dimension obtained from the scale-free region determined by the manual observation
4 结论
通过W-M函数的连续功率谱密度函数,结合标准路面谱,生成了分形路面不平度.采用结构函数法求取了分形路面不平度的标度律,该标度律说明分形路面不平度具有分形特征.本文提出了一种新方法确定了分形路面不平度的无标度区,求取了分形维数;同时,采用人工观测法确定了无标度区,并求取了分形维数.通过对比可知,本文提出的方法求取的分形维数与理论分形维数较为接近,比人工观测法精度高.
未来,可研究此方法在确定具有多重分形特征的曲线的无标度区和求取分形维数的准确性,另外可用洛伦兹方程进一步检验该方法的准确性.W-M函数曲线是无限项尺度为的随机相位余弦函数组成,其与生成路面不平度的三角级数法之间有何联系也是研究方向之一.
此外,作者研究发现W-M函数的相似形式:

比式(1)在描述路面不平度上精度更高,且可用于车辆平顺性仿真分析,后续研究可围绕此展开.
