基于三条件零速检测的行人定位导航系统设计
2019-11-17杨梦瑶种阳汪宇晴张卓凡
杨梦瑶 种阳 汪宇晴 张卓凡

摘要:为了跟踪定位徒步行走人员的实时位置,设计了一种基于三条件零速检测的行人定位导航系统。首先采集脚面的9轴数据:三轴加速度、角速度、磁强,然后利用卡尔曼滤波算法进行滤波处理,对处理后的数据用三条件判断的零速检测算法判断运动状态零速时刻,运用行人航迹推算算法进行定位解算。经过实验验证:该方法准确度达到94.5%,满足行人的导航定位的要求,并提高了导航定位的实时性与准确性。
关键词:导航;行人定位;行人航迹推算;零速检测;卡尔曼滤波
中图分类号:TP212.1 文献标识码:A
文章编号:1009-3044(2019)26-0105-03
开放科学(资源服务)标识码(OSID):
Abstract: In order to track and locate the real-time position of hikers, the paper designed a pedestrian positioning and navigation system based on three-condition zero-velocity detection. Firstly, sampling the 9-axis data of users foot, including tri-axial acceleration, angular velocity and magnetic intensity. Then, using the Kalman filter algorithm to filter ,using the zero-speed detection algorithm based on three-condition to judge the zero velocity moment. Last, using pedestrian-dead-reckoning to position the location. The experimental results show that the accuracy of the methods reaches 94.5%, which meets the requirements of pedestrian navigation and positioning, and improves the real-time and accuracy of navigation and positioning.
Key words: navigation; pedestrian position; pedestrian-dead-reckoning; zero velocity detection; kalman filtering
1 引言
捷聯惯导系统是一种完全自主导航系统[1],具有短时高精度和高稳定性等特点,在军事及民用方面都有较广泛的应用前景[2]。在我国,对行人导航的研究起步较晚,目前市面上大多数个人导航系统主要依靠GPS定位[3]。在郁闭度较高的空间环境下,卫星信号无法正常接收,常规的GPS卫星定位系统不能正常工作[4],WIFI等无线网络导航方式精度较高,但需要预设传感器节点,并标定信号强度与地理位置的关系,成本高且不适于广阔的场地[5]。惯性导航具有不怕干扰、隐蔽性好、完全自主等优点[6],该定位方式应用逐渐广泛。行人航迹推算算法的定位精度取决于初始位置和姿态信息的精确性以及推算过程中速度的航向信息求解,包括航向、步频和步长的估计。目前,常用的零速检测算法是基于对传感器输出的加速度和角速度的模值、方差以及幅值的单一值与已设定的阈值进行比较,提取出步态中的零速点。但这类算法易误判零速区间导致丢失零速点,导致行人的速度、位置误差增加[7]。卡尔曼滤波算法在数据滤波和参数评估方面效果显著[8]。原始数据波形图中存在噪声干扰,可通过卡尔曼滤波算法对其进行去除。
本文采用一种基于三条件零速检测[8]的行人定位导航系统。利用卡尔曼滤波算法进行滤波处理,利用三条件判断的零速检测算法确定零速区间,使用行人航迹推算(PDR)算法解算行人的位置与姿态信息。提高了定位导航的实时性与准确性。
2 系统结构
本系统基于零速检测,通过程序设计和误差补偿装置来实现较为准确的定位导航,并通过无线技术实现实时监测。结构流程如图1所示。
2 系统设计
2.1 卡尔曼滤波算法的设计
根据设计内容建立系统状态方程:
其中,系统在[k]时刻的状态为[Xk∈Rn],对应状态的观测信号为[Yk∈Rm],[A]为系统的状态转移矩阵,[Γ]为噪声驱动矩阵,[w]为过程噪声序列,[B]为观测矩阵,[vk]为量测噪声。进而根据状态一步预测方程、状态估值计算方程、滤波增益计算方程、一步预测协方差方程和估计协方差方程,建立卡尔曼滤波器。
卡尔曼滤波器可以衰减数据中白噪声干扰,优化原始数据,从而提高导航定位精度。
本设计中
2.2 零速检测算法的设计
零速检测法常用的方法为:加速度幅值检测法、加速度方差检测法和角速度幅值检测法。使用其中任何一种方法得到的零速区间判断准确度都较差,故本文使用三条件法对零速点进行检测(本方法中,以“1”表示处于静止状态,以“0”表示处于运动状态)。
通过公式(3)对运动状态进行判断:
式中[thamin]和[thamax]是给定的加速度阈值的上下限, [abk]表示三轴加速度的模值,[σ2abk]表示合成加速度的方差,[thσ2max]为给定方差阈值的上限值, [ωbk]表示三相角速度的模值,[thωmax]是给定阈值的上限值。
以上三个条件进行“与”逻辑运算,即当逻辑运算结果为“1”时,才能判断此时运动状态为静止。
3 实验验证
本文设计嵌入式软件与硬件系统,并开发了一款基于高德地图的手机APP,通过无线传输模块接收硬件系统发送的数据并进行处理,在地图上显示实验人员的实时位置,实现定位导航系统功能。其功能模块主要分为四个部分。
1) 数据采集模块:使用MPU9150,该模块进行三轴加速度、角速度、磁场强度数据采集;
2) 中央处理器模块:CPU使用STM32F411,该模块可以实现对数据信息的储存和转换;
3) 无线通信模块:使用ESP8285WIFI模块;
4) 供电模块。
手机APP设计有主界面登陆与连接界面。可通过WIFI连接界面进行手机与测试模块的连接并实现基本的计步功能,APP主界面如图2所示。
测试模块传感器放置于实验人员脚部,手机APP获取实时数据信息,在北京林业大学操场进行实验测试,实验装置如图3所示。
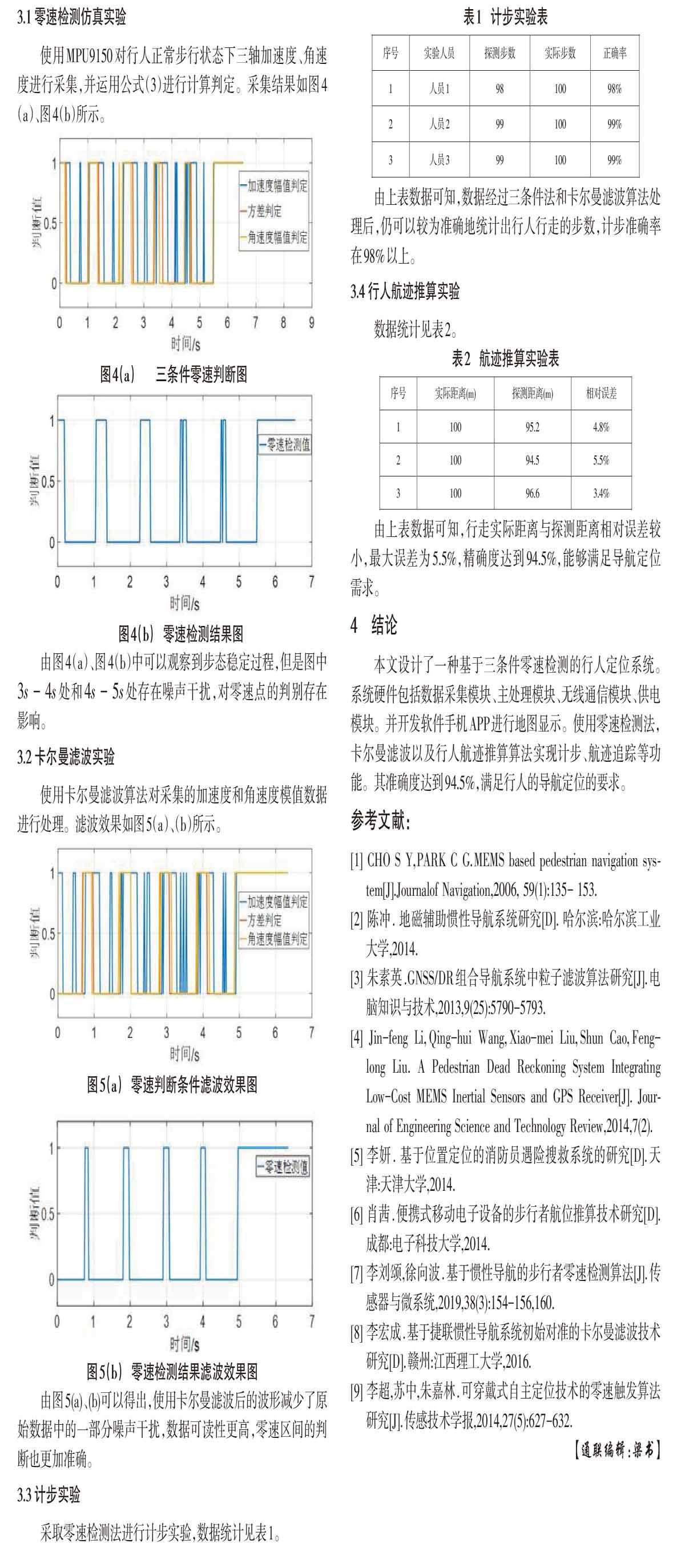
3.1 零速检测仿真实验
使用MPU9150对行人正常步行状态下三轴加速度、角速度进行采集,并运用公式(3)进行计算判定。采集结果如图4(a)、图4(b)所示。
由图4(a)、图4(b)中可以观察到步态稳定过程,但是图中[3s-4s]处和[4s-5s]处存在噪声干扰,对零速点的判别存在影响。
3.2 卡尔曼滤波实验
使用卡尔曼滤波算法对采集的加速度和角速度模值数据进行处理。滤波效果如图5(a)、(b)所示。
由图5(a)、(b)可以得出,使用卡尔曼滤波后的波形减少了原始数据中的一部分噪声干扰,数据可读性更高,零速区间的判断也更加准确。
3.3 计步实验
采取零速检测法进行计步实验,数据统计见表1。
由上表数据可知,数据经过三条件法和卡尔曼滤波算法处理后,仍可以较为准确地统计出行人行走的步数,计步准确率在98%以上。
3.4 行人航迹推算实验
数据统计见表2。
由上表数据可知,行走实际距离与探测距离相对误差较小,最大误差为5.5%,精确度达到94.5%,能够满足导航定位需求。
4 结论
本文设计了一种基于三条件零速检测的行人定位系统。系统硬件包括数据采集模块、主处理模块、无线通信模块、供电模块。并开发软件手机APP进行地图显示。使用零速检测法,卡尔曼滤波以及行人航迹推算算法实现计步、航迹追踪等功能。其准确度达到94.5%,满足行人的导航定位的要求。
参考文献:
[1] CHO S Y,PARK C G.MEMS based pedestrian navigation system[J].Journalof Navigation,2006, 59(1):135- 153.
[2] 陳冲. 地磁辅助惯性导航系统研究[D]. 哈尔滨:哈尔滨工业大学,2014.
[3] 朱素英.GNSS/DR组合导航系统中粒子滤波算法研究[J].电脑知识与技术,2013,9(25):5790-5793.
[4] Jin-feng Li,Qing-hui Wang,Xiao-mei Liu,Shun Cao,Feng-long Liu. A Pedestrian Dead Reckoning System Integrating Low-Cost MEMS Inertial Sensors and GPS Receiver[J]. Journal of Engineering Science and Technology Review,2014,7(2).
[5] 李妍. 基于位置定位的消防员遇险搜救系统的研究[D].天津:天津大学,2014.
[6] 肖茜.便携式移动电子设备的步行者航位推算技术研究[D].成都:电子科技大学,2014.
[7] 李刘颂,徐向波.基于惯性导航的步行者零速检测算法[J].传感器与微系统,2019,38(3):154-156,160.
[8] 李宏成.基于捷联惯性导航系统初始对准的卡尔曼滤波技术研究[D].赣州:江西理工大学,2016.
[9] 李超,苏中,朱嘉林.可穿戴式自主定位技术的零速触发算法研究[J].传感技术学报,2014,27(5):627-632.
【通联编辑:梁书】
