一种转台伺服系统干扰补偿控制方法研究
2019-11-15赵回王雪梅许哲杨柱吴桐王健永
赵回 王雪梅 许哲 杨柱 吴桐 王健永


摘要:为提高转台伺服系统的低速跟踪性能,提出一种结合LuGre摩擦模型和非线性干扰观测器(NDO)补偿非线性干扰的方法。使用LuGre摩擦模型补偿系统的摩擦干扰力矩,建立NDO模型消除系统建模不精确及其他未知干扰的影响,并采用反演法设计系统的自适应滑模控制律。通过仿真表明,基于LuGre+NDO模型自适应滑模控制能有效消除转台的低速“爬行”现象,位置稳态误差达到2×10–5rad,速度稳态误差达到1.5×10–3rad/s。且通过与传统控制方法结果对比,证明所提出的方法具有较好的控制性能和干扰抑制特性,提高伺服系统的跟踪性能。
关键词:转台伺服系统;LuGre摩擦模型;非线性干扰观测器;自适应滑模控制
中图分类号:TP273
文献标志码:A
文章编号:1674–5124(2019)03–0139–07
Research on a method of turntable servo system disturbance compensated control
ZHAO Hui, WANG Xuemei, XU Zhe, YANG Zhu, WU Tong, WANG Jianyong (Rocket Force University of Engineering, Xian 710025, China)
Abstract: In order to improve the low-speed tracking performance of the turntable servo system, this paper proposes a method combining LuGre friction model and nonlinear disturbance observer (NDO) to compensate nonlinear interference. This paper uses LuGre friction model to compensate the frictional disturbance torque of the system and establishes NDO model to eliminate the influence of inaccurate system modeling and other unknown disturbances. And the adaptive sliding mode control law of the system is designed by using the backstepping method. The simulation results show that the adaptive sliding mode control based on LuGre+NDO model can effectively eliminate the low speed "crawling" phenomenon of the turntable. The steady state error of the position is 2×10–5 rad. The steady state error of speed is 1.5×10–3 rad/s. Compared with the traditional control method, it is proved that the proposed method has better control performance and interference suppression characteristics, and improves the tracking performance of servo system.
Keywords: the turntable servo system; LuGre friction model; nonlinear disturbance observer; adaptive sliding mode control
0 引言
仿真轉台是飞机、导弹等飞行器进行姿态仿真的核心设备之一,高性能飞行器的研制,对仿真转台的静动态性能提出了更高的要求。在转台伺服系统中,摩擦力矩等非线性干扰因素的存在会严重影响其静动态性能,造成低速“爬行”现象[1],产生较大误差,甚至出现极限环振荡。因此,必须对转台伺服系统进行干扰补偿。
目前,针对摩擦力矩的干扰,基于LuGre摩擦模型的补偿技术应用十分广泛。文献[2]采用遗传算法和仿真实验对转台进行参数辨识,然后基于LuGre模型计算摩擦补偿,提高了转台的控制精度,但离线辨识的方法并不能真正反映转台所受的实际摩擦干扰。文献[3]采用双观测器实现对LuGre模型参数的自适应补偿,文献[4]采用滑模控制设计自适应补偿中的虚拟控制律,都有效抑制了摩擦干扰对伺服系统的不利影响,但没有考虑其他非线性因素所造成的干扰项。其次,在控制算法上有采用神经网络对PID参数进行动态调整[5],或使用鲁棒滑模控制[6],都实现了对转台的高精度控制。另一方面,仿真转台在实际建模中也存在非线性和不确定性及其他未知扰动,影响了系统的误差精度。文献[7]采用了鲁棒自适应控制补偿其他未知扰动力矩的影响,文献[8]采用RBF神经网络拟合模型不确定函数,效果显著,但工程应用都存在一定难度。
基于现阶段非线性干扰观测器(NDO)的广泛研究和应用[9],以及滑模控制对系统参数摄动和外部干扰具有良好的适应性和强鲁棒性,本文将采用自适应滑模控制对LuGre模型参数进行在线识别,以补偿摩擦力矩干扰。同时采用NDO对其他不确定干扰因素进行补偿设计,最后通过仿真实验证明所提出控制方法的有效性。
1 转台控制系统模型
1.1 伺服系统模型
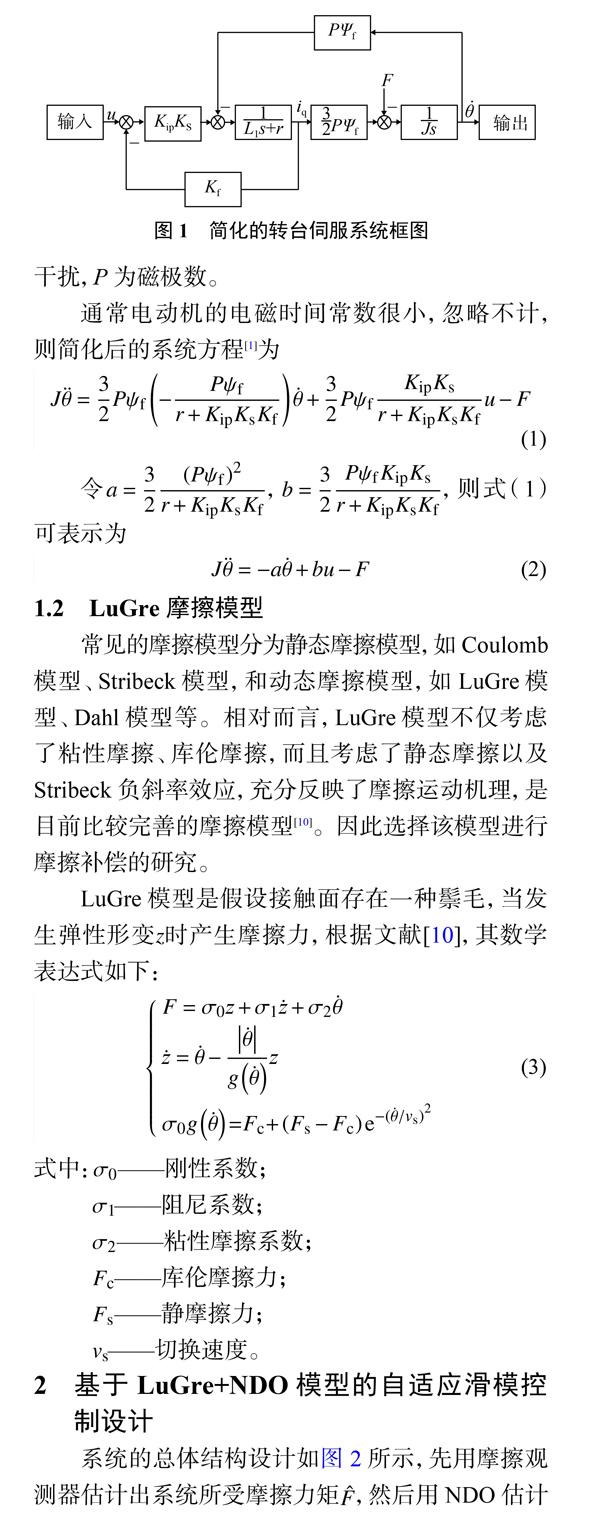
本文研究的转台应用于低转速、小转矩环境,系统采用无刷直流力矩电机驱动。根据文献[1],考虑摩擦干扰情况下,简化后的伺服系统框图如图1所示。
图中,Kip为电流比例调节增益,Ks为逆变电路增益,Kf为电流反馈系数,ψf为永磁体基波励磁磁场链过定子绕组磁链,J为转子等效转动惯量,L1为等效电感,r为电枢电阻,iq为矢量控制中的交轴电流,u为控制输入信号,θ?为转子角速度,F为摩擦干扰,P为磁极数。
通常电动机的电磁时间常数很小,忽略不计,则简化后的系统方程[1]为
可表示为
1.2 LuGre摩擦模型
常见的摩擦模型分为静态摩擦模型,如Coulomb模型、Stribeck模型,和动态摩擦模型,如LuGre模型、Dahl模型等。相对而言,LuGre模型不仅考虑了粘性摩擦、库伦摩擦,而且考虑了静态摩擦以及Stribeck负斜率效应,充分反映了摩擦运动机理,是目前比较完善的摩擦模型[10]。因此选择该模型进行摩擦补偿的研究。
LuGre模型是假设接触面存在一种鬃毛,当发生弹性形变z时产生摩擦力,根据文献[10],其数学表达式如下:
式中:σ0——刚性系数;
σ1——阻尼系数;
σ2——粘性摩擦系数;
Fc——库伦摩擦力;
Fs——静摩擦力;
vs——切换速度。
2 基于LuGre+NDO模型的自适应滑模控制设计
系统的总体结构设计如图2所示,先用摩擦观测器估计出系统所受摩擦力矩F?,然后用NDO估计出系统的未知干扰D?,经过增益调节得到补偿未知干扰D的控制量ud,再通过设计自适应滑模控制得到控制量ul,两者共同组成系统的整体控制量u,继而达到补偿所有干扰力矩的目的。
2.1 摩擦观测器设计
在工程实际中,摩擦模型的参数会发生非一致性变化,故采用双观测器法[3],估计LuGre模型中的鬃毛形变量z,同时实现对动态参数σ0、σ1和σ2的在线调节。设z的两个估计值分别为z?1、z?2,其状态观测方程为
其中,t1、t2为状态观测器的动态项。
定义状态观测误差z?1=z1?z?1,z?2=z2?z?2,根据式(3)、式(4)可推得:
令σ=σ1+σ2,定义σ?0、σ?1和σ?为参数σ0、σ1和σ的估计值。将z1、z2替代式(3)中的不可测变量z,则摩擦力矩的估计值F?为:
定义参数估计误差σ?0=σ0?σ?0、σ?1=σ1?σ?1、σ?=σ?σ?,则有:
定义摩擦误差f=F?F?,结合式(3)、式(6)和式(7)可知:
2.2 非线性干扰观测器设计
非线性干扰观测器一般用来估计系统外部扰动和补偿系统的不确定性。考虑系统受到建模不精确和未知波动力矩等非线性因素D的影响,根据式(2),系统方程可表示为
设计NDO对干扰D进行补偿,具有如下形式[11]:
其中,p(θ,θ?)为设计的非线性函数,L为观测器增益,且满足:
考慮没有干扰D和F的微分先验知识情况下,假设相对于观测器的动态特性,干扰的变化是缓慢的,即:
定义观测误差d=D?D?,结合式(10)、式(11)和式(12),可得观测器误差动态方程为:
设计系统控制输入u=ul?ud,其中,ud=D?/b,则式(9)描述的系统可变为:
即采用NDO后,系统受到的非线性干扰由D变成了d,使得未知干扰减小,降低了其对系统的影响。
2.3自适应滑模控制律设计
设系统给定的位置输入为θd,定义位置跟踪误差e=θd?θ,由式(14)可知:
采用动态面反演法对自适应滑模控制进行设计,步骤如下:
步骤1:定义Lyapunov函数:
其中,s为设计的滑模函数,即:
结合式(15)可推得:
设计控制律函数:
其中,h和γ均为大于零的常数。结合式(16)、式(18)和式(19)可推得:
步骤2:定义Lyapunov函数:
结合式(20)、式(21)可推得:
对d?设计控制律:
为估计出d?须得到f的值,而现实中摩擦力F无法得到,为解决这一问题,可利用摩擦观测器的输?出作为d?估计的输入。根据式(12)推得:
将式(23)带入式(22)中可得:
步骤3:定义Lyapunov函数:
对式(26)求导可得:
将式(5)、式(8)和式(25)带入可得:
为了保证函数V?2的负定性,设计控制律如下:
将式(29)带入式(28)中,可得:
由式(17)可知:()
因为参数h、γ、σ0、σ1、L等都为正实数,若2hk?1,则ee??hs2?0,即可保证V?3?0。通过上述对自适应滑模控制律的设计,可使得系统满足Lyapunov稳定性条件,误差值收敛,转台伺服系统趋于稳定,可实现对期望运动轨迹的精确跟踪。
3 仿真分析
3.1 转台低速性能分析
利用Matlab/Simulink软件对系统进行仿真,为分析伺服系统的低速性能,采用PID控制建立系统的仿真模型,系统所受的摩擦力矩F使用Stribeck摩擦模型[1]得到,其数学表达式如下:
其中,Fc=15N/m2,Fs=20N/m2,Kv=2N/m2,vs=0.01。查阅相关电机系统参数,取J=27.6kg?m2,a=398.4,b=3.622×103,输入位置指令θd=0.1sint,采用PID控制的参数Kp=Kd=1,Ki=0.1,得到位置和速度的仿真曲线如图3所示。
从仿真结果可以看出,由于摩擦力矩的存在,转台伺服系统会出现低速“爬行”现象,即位置跟踪曲线有“平顶”现象,速度跟踪曲线出现“死区”现象。因此必须对系统的摩擦干扰进行补偿控制。
3.2 基于LuGre模型自适应控制分析
为消除摩擦力对伺服系统低速性能的影响,常采用基于LuGre模型的自适应补偿控制,采用上文电机模型,设计误差e1=θd?θ,e2=e?1+10e1,设计控制律:
系统所受的摩擦力矩F使用LuGre摩擦模型得到,其参数r0=r1=r=50,σ0=5,σ1=9.8,σ2=10。为研究非线性未知干扰对跟踪精度的影响,给定未知干扰信号D=20sin(πt)+rand(),输入指令θd=sint,采样时间为0.1ms,分别在有无干扰D的情况下进行仿真实验,得到仿真曲线如图4所示。
由图4(a)、图4(b)可知,采用LuGre模型自适应控制可以消除伺服系统低速“爬行”现象,提高系统的跟踪性能。对图4(c)、图4(d)分析可知,当系统受到非线性未知干扰时,系统的位置误差和速度误差都发生了较大波动,结果如表1所示,因此在考虑非线性未知干扰情况下,该方法补偿性能有待改善。
3.3 基于LuGre+NDO模型自适应滑模控制分析
采用上文电机模型和LuGre模型,给定未知干扰信号D=20sin(πt)+rand(),在NDO中,设计p(θ,θ?)=λθ?,λ=80,L=2.90,其余参数取值k=10,h=γ=100,rd=50。给定输入指令θd=sint,采样时间为0.1ms,分别在有无干扰D的情况下进行仿真实验,得到仿真曲线如图5所示。
由图5(a)、图5(b)可以看出,在采用LuGre+NDO模型补偿的自适应滑模控制下,系统的位置、速度跟踪曲线能够很好地拟合理想输出曲线,消除了转台伺服系统低速“爬行”现象。对图5(c)、图5(d)分析可知,在受非线性干扰情况下,系统的位置、速度稳态误差保持不变,位置稳态误差控制在2×10?5rad左右,速度稳态误差控制在1.5×10?3rad/s左右,结果见表1。仿真结果证明了该方法可以有效的降低伺服系统位置和速度跟踪误差,满足转台使用的较高精度要求。
4 结束语
本文提出了一种基于LuGre+NDO模型补偿的自适应滑模控制方法,针对摩擦干扰和不确定未知干扰分别进行了补偿设计,并对比普通PID控制和基于LuGre模型自适应控制进行仿真实验。仿真结果表明普通PID控制会出现低速“爬行”现象,基于LuGre模型自适应控制会出现未知干扰引起较大误差波动现象。相比之下,本文方法能有效消除低速“爬行”现象,降低稳态误差,提高跟踪精度,同时也解决了低速转台受摩擦干扰之外诸多非线性干扰的影响问题。结果证明了所提出控制方法的有效性。
参考文献
[1]李悦.高精度大尺径轴系测角及控制系统研究与设计[D].哈尔滨:哈尔滨工业大学,2016.
[2]于伟,马佳光,李锦英,等.基于LuGre模型实现精密伺服转台摩擦参数辨识及补偿[J].光学精密工程,2011,19(11):2736-2743.
[3]刘东升,白桦,李文君,等.一种LuGre摩擦模型自适应补偿的分析及仿真[J].计算技术与自动化,2015,34(3):16-20.
[4] XIE W F, ZHAO Z Y. Sliding-mode observer based adaptive control for servo actuator with friction [C]//Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, 2007.
[5] XIA X H, YU R. Servo system PID control of neural network algorithm based on LuGre model[J]. Chemical Engineering Transactions, 2015, 46: 151-156.
[6] SEONG I H, CHAN S J. Robust sliding mode control for uncertain servo system using friction observer and recurrent fuzzy neural networks[J]. Journal of Mechanical Science and Technology, 2012, 26(4): 1149-1159.
[7] HOU D Y. Integrated direct/indirect adaptive robust control of turntable servo system based on LuGre model friction compensation[C]//The 31th Youth Academic Annual Conference of Chinese Association of Automation, 2016.
[8]白國振,余洁皓.基于神经网络补偿的转台伺服系统控制研究[J].计算机应用研究,2016,33(6):1676-1681.
[9]常斌,常雅男,艾飞.飞行模拟转台非线性干扰观测器反步滑模控制器设计[J].计算机测量与控制,2016,24(12):67-70.
[10]王喜明.基于LuGre模型的摩擦力矩补偿研究[D].北京:中国科学院研究生院,2007.
[11] CHEN W H. A Nonlinear Disturbance Observer for Robotic Manipulators[J]. IEEE Transactions on Industrial Electronics, 2000, 47(4): 932-938.
(编辑:莫婕)
