输煤系统轨道式巡检机器人辅助定位系统的设计
2019-11-15牟志凌
文/牟志凌
输煤系统轨道式巡检机器人主要完成输煤沿线设备的日常巡检,例如输煤皮带是否跑偏撕裂;输煤皮带机是否渗漏油;落煤口是否发生堵煤;输煤沿线是否有无关人员出现等等。轨道式巡检机器人为了完成上述检测,往往需要行走至被测设备附近,调节摄像机机位和角度,采集视频信息,并最终利用机器视觉有关算法准确识别上述故障和异常。目前,实现轨道机器人视觉定位的方法有基于激光的定位检测、基于磁性标记的定位手段等等。本文设计了基于机器视觉的定位检测系统,只需在初始化阶段,人工标定输煤沿线的被测设备,系统可自动记录每一个观测点的合理拍摄机位和角度,后续巡检工作即可自主完成,无需人工干预。
1 系统总体设计
1.1 嵌入式云台控制器
嵌入式云台控制器包含树莓派B+控制器,该控制器具备体积小、运算速度快等优点。可构建机器视觉算法处理平台,支持opencv视觉库,可实现机器视觉有关智能算法的嵌入式应用;利用以太网通信接口,控制云台角度调节;设计以太网接口单元,可将云台摄像机采集的视频数据实时传输至树莓派控制器。因轨道式巡检机器人在初始化阶段,需要人工参与完成第一次被检设备的标定,因此,需要在树莓派控制器本体上扩展液晶显示单元,便于操作人员观察和设置。
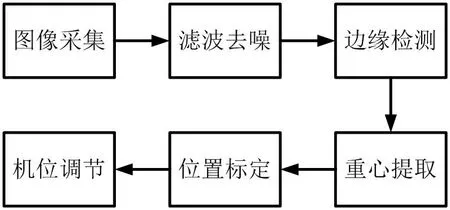
图1:技术路线图
1.2 高精度编码器控制单元
轨道式巡检机器人利用两个驱动轮、两个从动轮实现轨道行走,为了实现巡检机器人在轨道上的准确定位,本文在主动轮上安装高精度编码器,通过记录主动轮正反转圈数,实时测得轨道式巡检机器人的位置。同时,为了消除系统的累积误差,在轨道上间隔安装基准点,提高机器人的定位精度。本文采用了绝对型旋转编码器,具备位置唯一、抗干扰、无需掉电记忆。该编码器通过串行接口与嵌入式云台控制器相连接,控制器将获取的位置信息存储至EEPROM。当轨道式巡检机器人自主巡检时,只需按照存储的既定巡检任务,行走至对应监测点,控制云台,获取正确的视频图像信息。
1.3 辅助照明控制单元
因输煤现场照明条件差,不利于图像的采集,本文设计了可调节多色温的辅助照明单元,该照明单元采用三种色温的LED灯珠,可实现被测设备在不同色温照明条件下的成像。上述设计针对的是输煤现场会有一定程度的粉尘污染,低色温的光穿透性强,可实现较好的照明。当粉尘浓度较低时,可切换至色温较高的照明条件。更利于图像的有效采集。因本文在输煤沿线设备的表面配套安装了荧光反射光标,所以利用辅助照明单元有提高荧光光标的反射效果,更利于光标图像的采集。
2 算法设计
轨道式巡检机器人在初始化阶段,操作人员手动操作机器人行走至需要进行针对性检测的被测设备附近,调节云台角度和摄像机焦距,完成检测位置的标定。同时为了进一步提高定位精度,在被测设备表面配套安装了荧光反射光标,以便利用机器视觉功能,准确识别与定位被测设备。其流程如图1所示。
该过程需要人工设置检测点,并将位置信息存储至机载的控制器,此外,人工亦可设置巡检的频率和数据上传的时间间隔等信息。因输煤现场作业人员较多,人员复杂,为了保证系统的安全性,本文设计了基于人脸识别的授权管理功能,只有通过认证的操作人员,才可以完成初始化设置功能。
全部检测位置标定后,巡检机器人可自主完成巡检,行走至被测设备附近,按照既定的检测角度和焦距,采集视频图像。采集的视频图像传输至机器视觉处理单元,利用小波变换、边缘检测、图像分割,获取准确的故障特征。
Opencv是一个在业界被广泛应用的跨平台机器视觉库。其拥有强大的跨平台、多语言支持能力,已经成为机器视觉领域最影响力的研发工具之一。目前,opencv已经成功应用到多个领域,例如人脸识别、车牌识别、智慧交通、智慧城市等。本文在充分学习与研究opencv视觉库的基础上,并结合火电厂输煤系统输煤皮带跑偏检测的工艺要求,成功将其移植至嵌入式平台。
摄像机采集的图像,依次经过图像去噪、图像增强,获得图像的灰度图。图像平滑可有效去除图像噪声,原理是利用领域的平均值代替该点像素,有效去除椒盐噪声。与此同时,会引起图像边缘模糊,因此需要后续处理。本文亦采用中值滤波作为去噪的手段,可有效去除脉冲噪声。图像增强则采用直方图均衡化作为主要算法,实现推向的锐化,对图像空间中的分量进行均匀性分布处理,不仅改善了图像的视觉效果,有增强了图像的区域特征。

图2:上位机运行界面
图像经过上述处理后,获取灰度图像,并利用Canny边缘检测算法获取被测设备形态特征,如果有渗漏油发生,则可以有效提取油渍所形成的图像轮廓。Canny边缘检测的实现原理是:从图像中的不同物体中提取有关结构信息,减少对其他非关键信息的处理,大大减少需要处理的数据总量。不同的视觉对象,其边缘特征会有较大差异,Canny算子便提供了一种标准化的边缘检测技术。其实现流程一般如下:对处理得来的灰度图像进行高斯滤波处理,进一步去除噪声;接着计算被测对象图像中每一个像素的梯级强度和方向;选取适宜的双边阈值,获取被测对象的边缘特征。因本文配套安装的荧光反射装置具有明显的形态特征,所以算法只需在图像中寻找该荧光点。
经上述算法,可准确提取荧光标签的准确轮廓,本文利用重心法,进一步计算所检测的轮廓的几何中心。为了减小因操作人员的个体差异,或者是被测设备的位置或者姿态发生变化所带来的不利影响,本文采用机器学习有关算法,建立被测物体状态检测数据库与检测模型,可在一定程度上,自主修正检测机位,优化视频采集角度。
3 上位机软件简介
本文设计了基于QT集成开发的上位机监控软件,可实现现场实时图像显示、位置标定、云台角度调节、辅助照明管理等功能,亦可实现摄像机IP远程设定、热像仪温标设定等功能。如图2所示。
4 小结
本文设计的输煤系统轨道式巡检机器人辅助定位系统,智慧化程度高、安装简单,可实现可辅助巡检机器人实现位置定位,该装置将目前较为前沿的机器视觉技术应用到了传统的火电厂输煤领域,为进一步实现智慧电厂,奠定了坚实基础。
