基于计算机视觉的距离测量方法在电网工程审计中的应用研究
2019-11-12肖琴杨栋李均委王鸿羽余建琴周平
肖琴 杨栋 李均委 王鸿羽 余建琴 周平

摘要:该文主要阐述计算机视觉获取场景的距离信息的用两种方法,通过对单目视觉法及双目视觉法的优劣性分析比对,确定适用电网工程及输电线路杆塔测距的技术路线,并对基于双目视觉法的GRBD深度相机的距离检测方法、基于活动目标跟踪的杆塔数量统计方法,两种技术的原理及在电网工程审计实务中的应用进行了科学分析研究,为探索运用信息化手段提高审计工作质效,实现数字化电网工程审计的新思路、新方法、新突破提供了理论支持及技术路线研究。
关键词:计算机视觉;测距;工程审计
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2019)25-0227-04
Abstract: This paper mainly expounds two methods, principle and application of computer vision to obtain distance information of scene, it provides theoretical support and technical research for the realization of digital power grid engineering audit.
Key words: computer vision; measuring distance; engineering audit
1 背景
采用计算机视觉获取场景的距离信息主要用两种方法,按照处理光照的方式可以分为主动式和被动式。主动式方法是指控制光照的方式和光源的模式,拍摄光束在物体表面形成的图像,然后依据几何关系进行计算的方法,它又可分为结构光法和激光自动聚焦法,通常采用激光或雷达来获取目标的距离及三维信息。但是激光测距不适用于测量高速的目标。被动式方法一般是指利用自然光或者均匀照明的方式,依据直接拍摄的物体图像进行测量的方法,主要分为单目视觉法、双目視觉法等。考虑到在输电线路巡线无人机的高速性,能够适用于该场景下主要的测距方法有单目视觉法、双目视觉法和基于GRBD深度相机的距离检测方法。
电网工程审计,主要审计电网建设过程中变电站、线路、杆塔、工程规模、线路长度是否规范合规,工程量是否足额完成,工程内容是否符合合同约定,因电网工程普遍存在点多线长面广的特点,传统人工、放线、车测等方式效率低,人工成本大,且成果不高。通过采用计算机视觉获取场景的距离信息方法研究及应用实践,为运用信息化手段提高审计工作质效进行了有效探索,实现数字化电网工程审计的新思路、新方法、新突破。
2 单目视觉法及双目视觉法原理及比较分析
2.1 单目视觉法
单目标视觉指采用一个图像采集设备对被测物体进行二维图像采集,利用所得像点的坐标与被测物体的实际三维坐标之间的转换关系以及光学约束条件,进行三维坐标还原的方法单目视觉法可分为三类:基于对焦的方法,基于离焦的方法和基于变焦的方法。
2.1.1 基于对焦的方法
在保持目标空间点与摄像机的距离(即物距)不变的情况下,改变成像平面的位置(即改变像距),在同一场景对同一目标物连续拍摄多幅图像,因焦距的改变,同一空间点在多幅图像中的像只有一个是最清晰的,通过清晰度判别的方法,对物体成像的边缘纹理等特征进行分析,容易找到成像最清晰的图片,结合相应的光学参数就可以得到深度值等信息。
虽然基于对焦的方法能够通过调节焦距的步长来控制深度的分辨率,但是需要处理大量的序列图像,计算量较大,而且光学参数的调节过程比较烦琐,当场景纹理信息较少时,深度难以区分,分辨率也有限。
2.1.2 基于离焦的方法
与基于对焦的方法类似,在保持物距不变的情况下,改变像距或孔径,对同一场景至少拍摄两幅模糊的图像,再对应两组摄像机的参数,根据深度与模糊半径及摄像机参数之间的几何关系,可计算得出深度信息。
2.1.3 基于变焦的方法
在保持空间目标点和成像平面不动时,移动镜头位置或改变其他的摄像机参数,再改变摄像机的焦距值,使目标点在不变的像平面上成一组清晰但大小不同的像,焦距发生变化时,同一目标物体对应像的大小也发生变化,根据其像点位置在不同焦距下的变化大小可以计算出其目标点对应的深度值。
基于变焦的方法兼备了基于对焦和基于离焦方法的优点,并在一定程度上克服了两者的缺点,它最少只需要获取两幅变焦图像和焦距参数,该方法的处理速度快,实时性好,但是这种中心区域深度恢复的方式效果较差,像点位移参数估计的精度直接影响深度计算的误差。
2.2 双目视觉法
双目视觉是仿照人类利用双眼感知距离的原理,对目标物体进行三维信息获取的方法。它是被动式测距方法中最重要的距离感知技术,是其他计算机视觉方法所不能取代的,具有广泛的适应性。现已应用于机器人导航微操作系统的参数监测、三维测量以及虚拟现实等领域。
通过表1对比单目视觉和双目视觉的优劣,可以看出,双目视觉方法更适合进行输电线路杆塔的距离测量。
3 双目视觉法技术分析及在电网工程审计中的应用
3.1 基于双目视觉法输电线路距离检测方法
3.1.1 图像的预处理
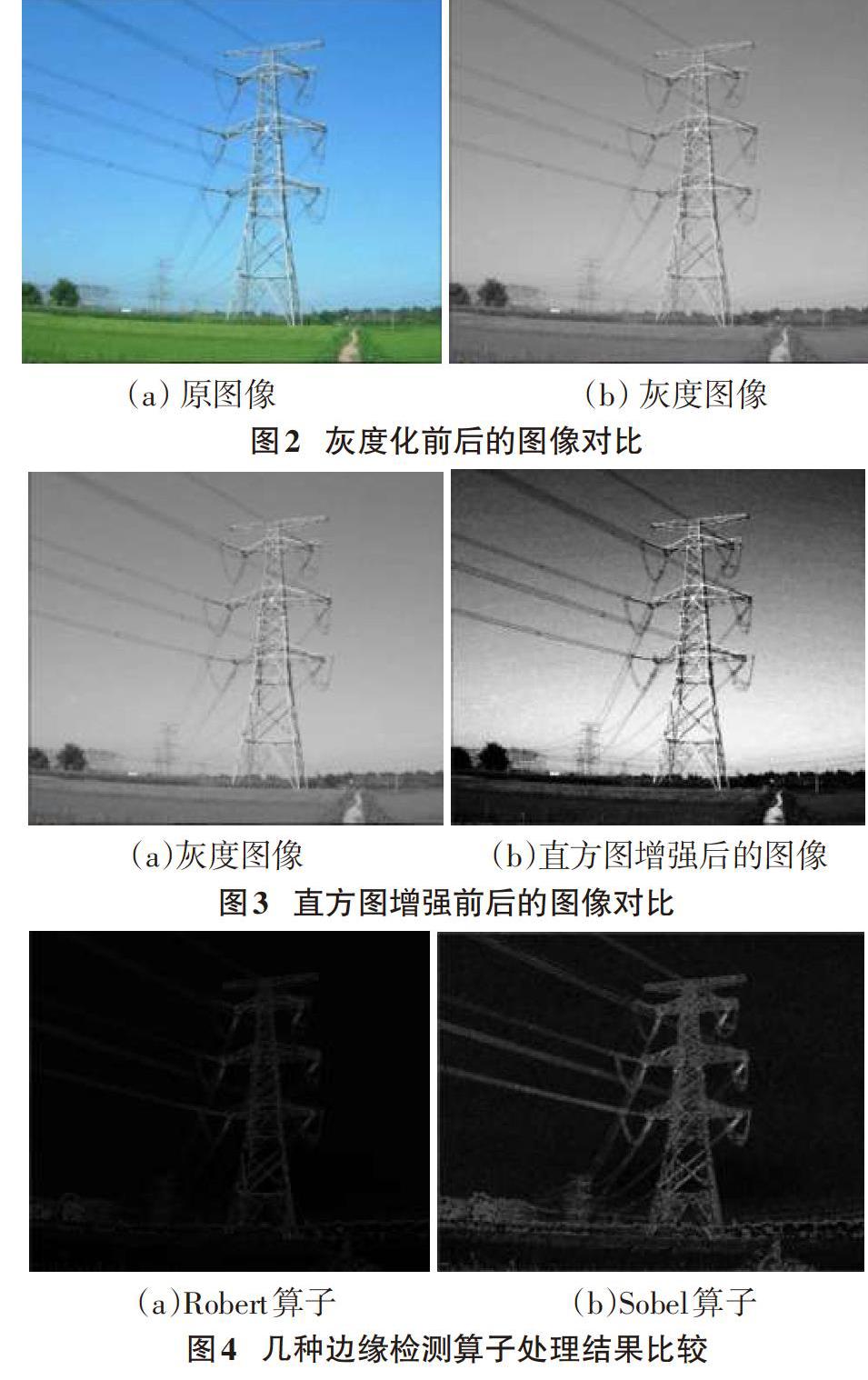
通过摄像机等图像采集设备获得的图像,由于硬件设备本身的缺陷以及外界环境因素的干扰,往往包含一些随机噪声和畸变因素,降低了图像的质量,这给人或计算机视觉的分析和理解带来了较大影响,严重的情况下会导致分析结果的错误。为了遏制图像质量的降低,对获取的图像进行预处理是十分必要的,以此来消除图像噪声,增强图像细节,进而提高图像的信噪比。图像的预处理过程大致有如下几步:图像的灰度转换、图像增强、图像滤波、边缘检测、图像分割等。
3.1.2 双目视觉的测距原理
双目视觉发基于的是视差原理,众所周知,几乎所有具有是觉得生物都有两只眼睛,他们在观察物体是会产生远近或者深浅的感觉。双目视觉正是建立在这个原理的基础上,利用两个摄像机来代替人的双眼,通过获取同一被测物体的两幅图像,求出目标点在对应两幅图像中的视觉差异,以此来还原被测物体的空间位置。图5展示了视差测距的原理过程,为了描述和计算的简便,将模型简化为“平行立体视觉系统”。
3.1.3 双目视觉距离测量系统的构成
双目视觉测量距离下的系统构成如图6所示:
整个系统包括硬件和软件两大部分,大致的实验流程为:首先利用两个CCD摄像机分别拍摄被测目标的物体,然后通过图像采集卡接收摄像机送出的模拟视频信号并转变为数字信号送入计算机,这个传输过程可以通过数据线或者无线网络进行,同时记录下两个摄像机之间以及它们与被测目标物之间的相对位置关系,然后在计算机内通过软件编程实现对获取图像的预处理和匹配,进而依据双摄像机与被测物体的几何关系,然后对摄像机内外参数进行标定,最终实现空间目标物的距离测量。
3.1.4 双目视觉距离测量系统流程
双目视觉系统的距离测量流程步骤如下:
步骤1:获取图像,即是采用双目相机对目标进行拍照,获取目标的图像。
步骤2:摄像机标定,计算机视觉研究的对象是基于摄像机(或相机)所拍摄物体的图像,这些图像都是空间中的物体经过透视变换所形成的,因此世界坐标系下的点和图像上对应的成像点之间必然存在一种固定的映射关系成像几何模型来反应。摄像机的标定就是为了得到这种关系,对该几何模型的未知参数进行求解的过程。这些参数的求取需要通过实验测量与计算。
步骤3:图像预处理,指的是在对采集到的图像进行分析和理解之前,为改善图像质量,抑制畸变,或增强某些对后续处理具有重要意义的图像特征的处理手段。双目视觉同大多数视觉过程一样,识别处理之前也要经过图像预处理阶段,其本质目的是服务和方便于后继处理,好的处理方案可以有力地提升识别的精度和速度。
步骤4:图像匹配,是指针对不同摄像机或者同一摄像机下在不同成像条件下对同一目标物拍摄的两幅或多幅的图像通过一定的匹配算法识别出同名点,或根据已知模式到待匹配图像中寻找相对应模式的过程。
步骤5:三维还原,即是对基于双目视觉原理对匹配过后的图像进行三维还原,从而获取目标对象的三维信息。
步骤6:测距计算,最后依据三维几何模型来进行测距等计算。
3.2 基于GRBD深度相机的距离检测方法
RGBD深度相机是一种能够直接测量出所拍摄到物体距离信息的相机,该相机通过安装距离传感器的方式进行感知距离信息,并将距离信息保存在到图片中,即是拍摄到的图片包含了RGBD的信息。其中RGB色彩模式是工业界的一种颜色标准,是通过对红(R)、绿(G)、蓝(B)三個颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色的,RGB即是代表红、绿、蓝三个通道的颜色,这个标准几乎包括了人类视力所能感知的所有颜色,是目前运用最广的颜色系统之一。D表示的是Depth Map,在3D计算机图形中,Depth Map(深度图)是包含与视点的场景对象的表面的距离有关的信息的图像或图像通道。其中,Depth Map 类似于灰度图像,只是它的每个像素值是传感器距离物体的实际距离。通常RGB图像和Depth图像是配准的,因而像素点之间具有一对一的对应关系,从而构成了RGBD图片。因而,可以直接通过在无人几种装设GRBD深度相机传感器来获取无人机与杆塔之间的距离信息。
3.3 基于活动目标跟踪的杆塔数量统计方法
视觉目标跟踪是计算机视觉中的一个重要研究方向,有着广泛的应用,如:视频监控,人机交互,无人驾驶等。过去二三十年视觉目标跟踪技术取得了长足的进步,特别是最近两年利用深度学习的目标跟踪方法取得了令人满意的效果,使目标跟踪技术获得了突破性的进展。目标跟踪是指在视频中跟踪某一个或多个特定感兴趣对象的过程,不管物体如何运动,甚至是遮挡都能准确找出目标。另外,目标跟踪还要求在给定视频序列的条件下,预测后续帧中该目标的大小与位置。
考虑到进行无人机巡检时,拍摄的图像或是视频前后时间间隔很小,对于同一个杆塔而言,视频中前后两帧杆塔的位置会有很大程度的重叠,因而输电线路杆塔的数量统计问题本质上就是一个活动目标检测问题,当图像先后两帧杆塔的位置有很大重复时就不用计数,但是视频中出现新的没有重复的杆塔时就计数,从而实现杆塔数量的统计。
4 应用效果分析
通过基于双目视觉法输电线路距离检测方法、基于GRBD深度相机的距离检测方法、基于活动目标跟踪的杆塔数量统计方法的研究与应用,实现信息化方法与高技术含量设备的有效结合,实现了杆塔间距离测定、长距离线路距离测定和长距离间基于活动目标测定的杆塔数量测定,为新形势下电网工程审计提供了新的思路和方法,有效提高了现场工程量真实性、规范性、合规性审计的质量与效能。
参考文献:
[1] 周华强, 胡广平. 基于计算机视觉的远距离动态前景测距方法[J]. 科学技术与工程, 2013(35): 10722-10726.
[2] 基于差分能量水印和Hausdorff距离的图像认证与匹配算法研究[D]. 合肥: 合肥工业大学, 2014.
[3] 基于距离测度学习的图像分类方法研究[D]. 上海: 复旦大学, 2010.
[4] 张宁. 基于关联基准的单目视觉远距离坐标测量方法的研究[D]. 天津: 天津大学, 2008.
【通联编辑:谢媛媛】
