从测距“凹坑”看脉冲雷达上行链路增益调整
2019-11-11羌琦
羌琦


摘要:本文通过对某次校飞期间,某测量船脉冲雷达跟踪应答机在航捷附近产生测距凹坑问题的分析排查与解决,探讨了脉冲雷达产生测距凹坑误差的原因,并对脉冲雷达上行链路增益调整从工程应用地角度进行了定性分析,对今后类似问题的解决具有一些借鉴意义。
Abstract: This paper analyses and solves the problem of range concaveness near the approach point when the pulse radar track the RSP during the flight of calibration, discusses the causation of range concaveness, and qualitatively analyses the gain adjustment of the transmit link of pulse radar from the perspective of engineering application. The conclusion can be refer for the solution of the similar problem for the future.
关键词:脉冲雷达;增益;测量误差
Key words: pulse radar;gain;meter error
中图分类号:TN958.4 文献标识码:A 文章编号:1006-4311(2019)27-0237-04
1 问题的提出
在某次海上综合校飞任务中,测量船a脉冲雷达系统在分别跟踪本单位应答机与外单位应答机时发现,测距在航捷附近因上行链路增益饱和而降低了上行信号信噪比,使得激励信号经发射机放大后出现前沿杂散干扰,导致脉冲雷达在跟踪时,前沿杂散干扰提前误触发可本单位和外单位应答机,从而出现了测距“凹坑”现象,误差分别为6X~7Xm(本单位应答机)和3X~4Xm(外单位应答机)。
2 问题的解决
2.1 问题的分析排查
测距凹坑现象仅在航捷附近出现,此时测距范围为1X~2Xkm,下行AGC范围为3X~3XdB。根据脉冲雷达工作原理,其工作于应答模式时,产生测距“凹坑”的环节包括:①机载应答机;②船载脉冲雷达。机载应答机可能产生误差的原因是:应答机转发脉冲时延随着功率变化而出现变化。船载脉冲雷达可能产生误差的原因是:①信号处理过程中由于杂波干扰,导致测距波门出现偏移;②发射机输出脉冲波形前沿存在干扰,导致机上应答机提前触发。
对比测量船b与测量船c脉冲雷达在跟踪外单位应答机时均未出现测距凹坑现象,在跟踪本单位应答机,测量船c脉冲雷达存在1Xm左右的测距凹坑现象,由此可以排除机载应答机原因导致测距凹坑。
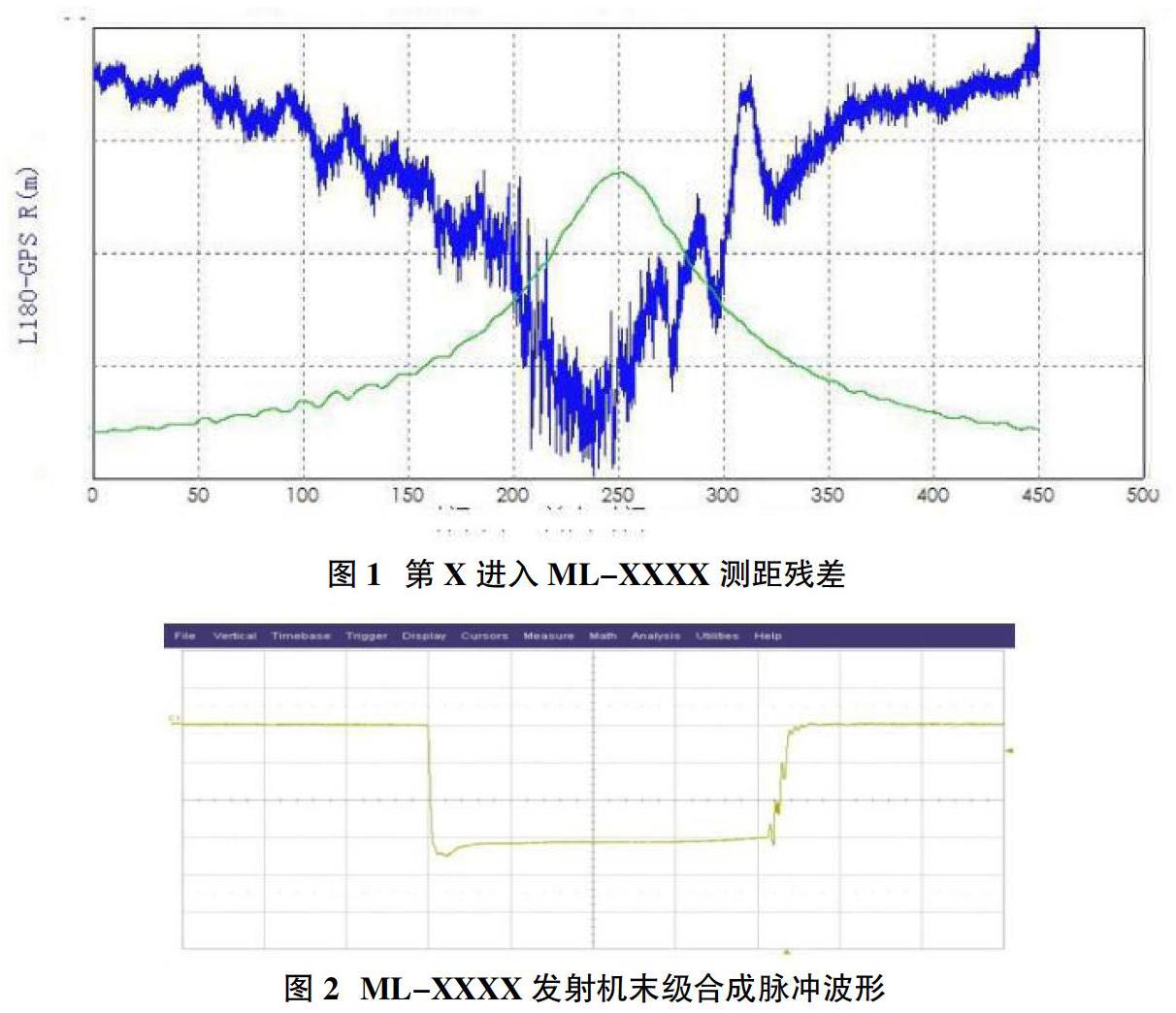
对照测量船c脉冲雷达的参数设置,将测量船a脉冲雷达信号检测门限提升至检测门限6XX、跟踪门限5XX(原为3XX、2XX),且安排测量船a脉冲雷达单独跟踪校飞飞机第X进入,排除其它站雷达干扰,测距凹坑现象依旧存在,如图1所示。由此,排除信号处理过程中由于杂波干扰,导致测距波门出现偏移。
由此基本可以确定测距凹坑产生的原因:发射机输出脉冲波形前沿存在干扰(比如脉冲前沿上升时间过长或前沿存在较大的尖峰),导致机上应答机提前触发,产生测距誤差。但采用LeCroy示波器(带宽600MHz,采样率2.5Gs/s)检测测量船a脉冲雷达发射机末级合成波形,波形良好,指标正常,如图2-图3所示。
进一步试验发现,在跟踪过程中,实时检测主接收机下行3XMHz脉冲中频信号,发现应答脉冲在跟踪过程中随着跟踪距离的减小,其前沿出现杂散,其时机与测距凹坑出现时间点基本一致,说明下行应答信号出现了异常,而非雷达信号处理中参数设置不匹配导致测距结果出现凹坑,实测杂散如图4所示。
通过分析第X架次测量船c脉冲雷达被动跟踪测量船a应答1信号的测距数据,发现对应测距凹坑出现时间点,测距值一阶差分与二阶差分均出现较大发散,与测量船a情况一致,而测量船c脉冲雷达在跟踪自触发的应答1信号,其测距值一阶差分与二阶差分均较为平滑。具体情况如图5-图10所示。可判定测量船a触发的下行应答信号异常导致测距凹坑。
综合分析各类现象,确定发射机脉冲前沿干扰提前触发应答机,导致测距凹坑。更换示波器Tektronic(300MHz,2.5GS/s)重新测试脉冲雷达发射机合成波形,发现其前沿存在着宽约300ns的杂散干扰(且在程控衰减XXdB条件下测试)。具体如图11所示。而测量船c脉冲雷达在相同测试条件下,其发射合成波形无杂散干扰,如图12所示。
2.2 脉冲前沿干扰产生的原因与对策
根据脉冲雷达发射链路的工作时序关系,如图13所示,前沿杂散主要是放电波形前沿将噪声信号放大所致,如图中圆圈所示。
经测试,激励信号并没有明显的前沿杂散,从而推断前沿杂散的产生在于放大链路工作于饱和状态。其原因在于:假设放大器增益为G,输入信号信噪比为,则经过放大器,输出信号信噪比为。当放大器饱和时,S0等于放大器最大输出值,小于SiG,而噪声信号放大了G倍,进一步降低了信号的信噪比。因此,提高主脉冲信号的信噪比,降低噪声干扰,有利于问题的解决。
脉冲雷达发射机采用链式放大的方式将激励源信号进行放大后送至天线,如图14所示。
发射机放大部分包括功率放大盒、前级放大器、速调管,三者以串联链式组合工作。为了防止因输入信号过大,导致输出信号饱和,在功率放大盒输入端(端口1)加衰减器,测试功率放大盒、前级放大器输出信号功率,存在饱和现象,串接1XdB衰减器,并将输出端送至两套发射机末级的衰减(端口2)均调整为2XdB衰减,输出脉冲前沿杂散有所改善。
激励源激励信号框图如图15所示。
产生饱和的模块主要是在于激励合成,因此在激励变频组件和激励合成之间增加1XdBm的衰减器,测试激励信号,激励合成输出处于非饱和状态。
将发射链路增益调整后,测试发射机输出脉冲波行,如图16所示。前沿杂散得到了大幅减小。
3 试验验证
调整完毕后,在校飞第X架次,安排第 X1~X2进入跟踪本单位应答机,X3~X4进入跟踪外单位应答机,测量船a脉冲雷达雷达在第X1、X2进入,发射机末级输出XkW功率,其余进入输出XXXW功率。事后数据处理结果表明,第X1、X2进入测距凹坑变为1Xm左右(与测量船c脉冲雷达数据一致),其余进入测距凹坑消失。试验结果证明脉冲前沿杂散导致了测距凹坑,同时说明本单位应答机信号判别能力低于外单位应答机,易被上行强噪声信号提前触发,造成测距凹坑现象,可通过降低发射功率的方法避免该现象的出现。
4 结论
由于上行链路工作于饱和状态,导致脉冲前沿噪声得到了放大,产生的杂散干扰导致了测距凹坑的产生。为了避免测距凹坑的再次发生,将雷达上行发射链路增益调整至接近饱和的线性状态,避免前沿噪声被大幅度放大,另外,配合程控衰减器,减低发射功率,保证脉冲前沿触发应答机,一定程度上可以降低测距凹坑的发生。通过试验,可知在试验任务中,由于跟踪距离较远,前沿杂散不会导致测距凹坑的发生,厂所在调试设备时,让激励源工作于饱和状态,提高了激励信号的稳定性,但牺牲了激励信号的信噪比。
参考文献:
[1]XX-XXXX脉冲测量雷达频率源分系统实施方案,中電第十四研究所.
[2]XX-XXXX脉冲测量雷达发射机分系统实施方案,中电第十四研究所.
[3]王德纯,丁家会,程望东,等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2007.
[4]郭高峰.雷达技术发展综述及多功能相控阵雷达未来趋势[J].价值工程,2014,33(31):219-220.