通用航空飞行服务站系统设计及监视数据融合算法研究
2019-11-11陈威强
陈威强


摘要:为完善我国低空空域的服务保障体系,在现行的空管体系下建立通用航空服务保障系统。结合民航现行管理体系以及通用航空用户的需求,提出了一套较为成熟的通用航空飞行服务站系统的设计,同时对多种监视数据源融合算法进行了简要分析和验证。通用航空飞行服务站系统的设计能够更好地为通航用户提供必要的飞行服务,从而更好地保证通航飞行器高效、安全的飞行。
Abstract: In order to improve the service guarantee system of low-altitude airspace in China, a general aviation service guarantee system is established under the current air traffic control system. Combined with the current civil aviation management system and the needs of general aviation users, a more mature general aviation flight service station system design is proposed. At the same time, a variety of monitoring data source fusion algorithms are briefly analyzed and verified. The general aviation flight service station system is designed to better provide the necessary flight services for the navigation users, thus better ensuring efficient and safe flight of the navigable aircraft.
關键词:通用航空;飞行服务站;数据融合
Key words: general aviation;flight service station;data fusion
中图分类号:V249;TP202 文献标识码:A 文章编号:1006-4311(2019)27-0142-04
0 引言
近年来高速发展的通用航空产业,在整个航空产业中占有越来越重要的地位。根据国务院中央军委《关于深化我国低空空域管理改革的意见》和国务院办公厅《关于促进通用航空业发展的指导意见》,到2020年底,我国将建成500个以上通用机场,通用航空器达到5000架以上,年飞行量200万小时以上。随着通用航空飞行量不断增加的急迫需求,结合国家战略发展的总体规划,低空空域管理改革已成为当前一项紧迫而重大的现实任务。而深化低空空域管理改革的主要任务和措施之一就是完善通用航空服务保障体系。在现行的空管体系下,按照区域(地区)、分区(终端区)和飞行服务站三级服务管理架构,建立通用航空服务保障体系[1]。本文根据民航空管现行体系以及通用航空用户的需求,对飞行服务站系统进行初步设计及其相关技术进行简要分析和研究。
1 通用航空飞行服务站系统架构
在现行的空管体系下,通用航空飞行服务站系统一般由区域信息处理中心和飞行服务站终端及设施组成。其中,区域信息处理中心负责与国家通航信息处理中心(一级)通过民航ATM网实现数据互联,与所辖区内的通航服务站(三级)建立运行关系,与相关区域的通航信息服务中心(二级)、民航区域管制中心、军区空军航管中心建立数据交换通报关系;飞行服务站系统负责与所在通航信息服务中心(二级)、所在飞行管制分区、通用航空用户建立业务运行关系[2]。如图1所示。
区域信息处理中心依托现有空管体系和飞行服务产品,充分利用相关信息资源,通过各个模块分别实现向飞行服务站提供所需航空情报、气象情报等信息,汇总及转发相关飞行情报信息,收集和发布天气报告、告警信息等功能。
通航飞行服务站主要实现收集、上报服务范围内低空通用航空的航空情报原始资料和数据;提供飞行所需的航空情报和气象服务;协助通用航空用户申报飞行计划,负责将飞行计划分发至相关飞行服务站和区域内飞行计划管理单位,并根据对飞行计划的反馈情况确认其可行性;接收其他飞行服务站发来的飞行计划,转发相关飞行计划管理单位,并反馈飞行计划处理结果;掌握并上报飞行计划及实施情况;掌握并上报服务范围内空域动、静态信息;提供告警和协助救援服务;提供飞行中服务;提供监视服务。
2 通用航空飞行服务站系统功能设计
通用航空飞行服务站系统是一个以面向通用航空用户提供相关的飞行服务为背景的服务平台。结合民航各行业(如空管部门)及通用航空用户的需求,设计的通用航空飞行服务站系统主要包含以下子系统:飞行计划服务子系统、情报服务子系统、气象服务子系统、告警与协助救援服务子系统、低空空域监视服务子系统和辅助用监控子系统。
2.1 飞行计划服务子系统
飞行计划服务子系统采用MQ(消息队列)方式获取民航空管系统地区飞行计划集中处理系统的航班计划数据。飞行计划集中处理系统通过MQ方式将航班计划信息发布至消息队列,飞行计划服务子系统通过每分钟轮询的方式获取航班计划信息,并更新至数据库。系统通过MQ方式实现飞行计划数据与飞行服务站系统、国家通航信息处理中心的数据交换。
2.2 气象服务子系统
气象服务子系统按所处理与显示的信息类别进行功能划分,可分为气象数据采集模块、气象数据处理模块、气象产品显示模块、气象数据上报模块和气象数据接口模块。组织架构如图2。
2.3 情报服务子系统
情报服务子系统包括数据引接、数据处理、数据发布、数据日志、数据上报、基础数据管理模块。
该系统主要功能为:接收并处理通航飞行相关的航行通告数据;采集处理飞行服务站上报的情报数据,包括:通用航空机场、服务范围内有关航行的设施设备基本信息,有关航行的设施、服务、程序等的运行状态、变化,以及涉及航行安全的危险情况及其变化的通知,并且将处理后的数据分发给所需的各飞行服务站;实现对上报数据以及处理后情报数据的可视化展示功能。
2.4 告警与协助救援服务子系统
该子系统包括了告警数据收集与处理模块和协助救援数据处理模块。根据数据格式和传输方式,通过不同数据接口从民航地区空管局气象中心、通航服务中心收集处理告警服务综合数据;飞行服务站用户可根据条件进行查询区域内的相关协助救援信息和事故区域的救援定位分析数据。具体功能如图3所示。
2.5 低空空域监视服务子系统
该子系统可引接二级数据处理中心ADS-B、广域 MLAT(多点定位系统)以及场面MLAT数据,对低空通航飞行区域进行通航飞行动态进行监视。该模块包含MLAT/ADS-B监视数据引接、显示与告警、综合航迹输出功能。其数据引接流程如图4所示。
2.6 辅助用监控子系统
辅助用监控子系统用于对业务模块的功能逻辑执行情况和网络传输数据情况进行监控,通过该子系统可以让用户实时地把握各个子系统的运行情况,一旦某个系统出现异常可以及时地对故障进行处理,提高处理故障或者异常的处理能力;该子系统主要的监控项包括:通航计划执行情况、报文收发情况、数据库访问情况、各个系统访问情况、接口服务运行情况等。
被监控的各模块通过UDP包方式定期发送自身状态信息,该信息经过数据接收、处理模块实现够告警信息内容和等级的判断;告警配置管理模块负责对告警的等级、判断周期等内容进行设置;通过WEB应用服务的方式获取告警结果,用于在用户方的功能呈现。
3 低空空域监视服务子系统监视数据融合算法及其实现
由于通航飛机活动的范围高度较低,通常在1000米以下,目前空管使用的一次和二次雷达由于工作方式的影响,无法对通航飞机活动范围进行完全覆盖。所以目前低空空域监视服务子系统可采用低成本全覆盖的综合监视手段,例如ADS-B、广域MLAT和场面MLAT等。因此该系统应具有异类多源监视数据融合的功能,为通航用户提供智能化、可视化的远程监视系统,也为空管或民航管理部门提供精确的、实时性强的、更新率高的低空空域活动目标的位置及相关信息。
系统通过引接ASTERIX CAT 021格式的ADS-B数据、ASTERIX CAT 010的场面MLAT数据以及ASTERIX CAT 020的广域MLAT数据等多元监视数据进行融合处理,形成系统航迹。该系统航迹进一步与综合雷达航迹融合形成综合航迹并对外输出和显示。如图5所示。
图5中,为提高各类监视数据处理的精度,低空空域监视服务子系统采用滤波法对数据进行滤波处理,形成局部航迹(如ADS-B航迹、MLAT航迹等),滤波法是现代最优估计理论的一种,对监视数据进行滤波(如卡尔曼滤波)处理的目的是尽量减少各种干扰造成的误差,从而得到误差最小的航迹。而航迹融合处理部分则是对滤波之后的局部航迹采用航迹融合算法,形成更加精确的综合航迹。
对于各种监视数据的融合,由于各监视数据源的时间周期以及空间坐标各异的问题,在进行数据融合之前首先要解决时间对准和空间对准问题,将各数据统一到同一个时间点和空间坐标。时间对准常用的方法有时序探测法和目标状态外推法等。而空间对准一般可采用空间坐标准换将其统一到相同坐标系统中。这两个问题都有较为成熟的解决方案[3],在此不多做讨论。而监视数据融合算法目前常用的有:马赛克算法、加权协方差法、线性组合算法以及分层融合算法等。其中,应用最广的是加权协方差法。加权协方差法是根据最小方差的原则,以各监视数据源对目标的状态估计的不同精度为依据,构造加权系数,最优融合所有的估计值。
由此可知,通过对N个互相独立监视数据源按照最小估计误差协方差原则分配每个数据源的权重系数,融合能够得到目标飞行器的最优估计。
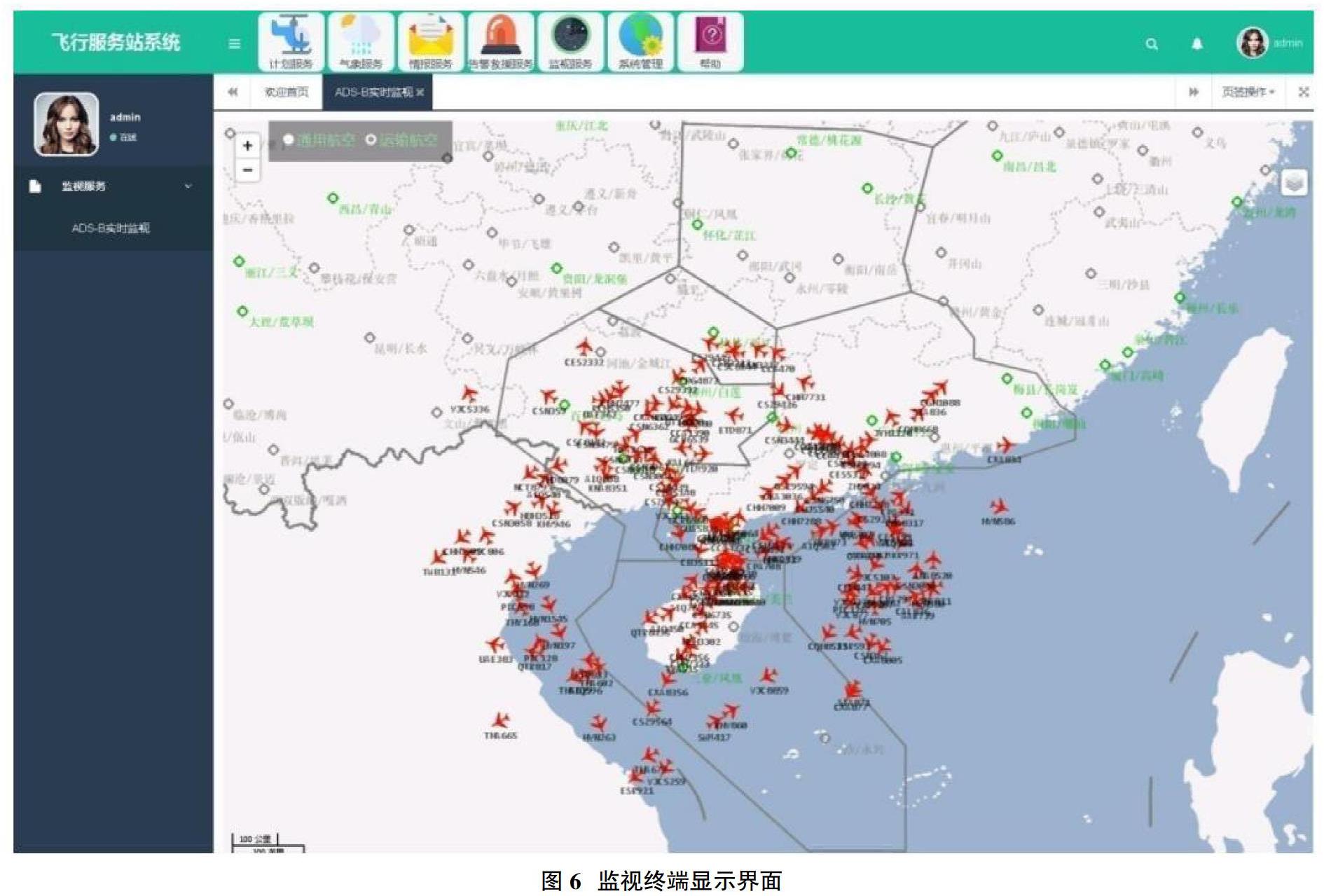
在工程应用方面,依托于某型通用航空飞行服务站系统对多种数据融合算法进行了实验验证,在某地区空管站引接了2部雷达信号和1路ADS-B数据站信号(有多个ADS-B地面站数据)进行数据融合。显示效果如图6所示。由于目前该系统引接的是空管系统部署的航管雷达和ADS-B系统信号,显示界面出现了密集的民航运输航班飞行器,未来的通用航空飞行服务站用户还可根据所辖高度范围、水平范围等条件筛选出通航飞行器动态进行监视。
实验结果显示该系统能对某机场附近空域的航路飞越航空器和进近的航空器均能进行精确的监视,而且也实现了长时间的精确跟踪,监控的有效范围达到了250Nm。当前雷达信息的间隔误差是终端<0.16Nm,航路<0.80,而ADS-B的要求其监视的终端区域位置精度<0.1Nm,航路位置精度<0.3Nm。因而本系统实现的精度误差不大于0.1Nm(终端区域)和0.3Nm(航路)。而且由于系统引入了ADS-B信息的报告频率较高(一般可配置为1s-10s),因此融合后的系统综合航迹也更加平滑,也提高了监视的可靠性和稳定性。
4 结束语
目前,可用于获取通用航空飞行器实时位置及相关状态信息的监视手段有很多种,例如一次雷达、二次雷达、ADS-B和多点定位系统(MLAT)等,但我国现阶段对低空监视方面的研究和应用尚不成熟,对于我国的通用航空而言,相关的应用和研究刚刚起步。仅仅依靠目前空管部门部署的传统的一、二次雷达,还不能实现对通用航空监视空域的完全覆盖。在诸多新的监视技术中,ADS-B的部署和维护成本最低,但ADS-B是一种非独立的协同式监视技术,需要通航飞行器的配合才能获取相应的定位等信息,而且需要GNSS系统的支持才能保证ADS-B所获取信息的完整性和有效性。而MLAT作为一种独立的协同监视技术,可以监视低空空域和场面目标的信息。因此本文对通用航空飞行服务站系统及其数据融合技术进行探究,将ADS-B和MLAT数据与传统的一、二次雷达数据进行融合,实现多种监视手段的优势互补,提高监视数据的可靠性和精确性。从而为通用航空飞行器提供精确的、实时性强的位置信息和相关信息,有效地保障了通用航空的飞行的安全。
参考文献:
[1]金沙舟.通用航空飞行服务站系统设计和低空综合监视仿真研究[D].中国民用航空飞行学院,2012.
[2]黄涛.通航区域飞行服务中心的功能与应用研究[A].中国科学技术协会、中华人民共和国交通运输部、中国工程院.2019世界交通运输大会论文集[C].中国科学技术协会、中华人民共和国交通运输部、中国工程院:中国公路学会,2019:11.
[3]周雷,辛晓娜,陈川波.结合ADS-B的航管监视数据融合关键技术[J].计算机工程与应用,2013,49(14):231-235.
[4]田士佳,杨宵鹏,姚坤,曹逸樵.TCASII与ADS-B数据融合新算法[J].传感器与微系统,2016,35(3):130-136.