图像去雨雪算法分析
2019-11-10陈震
陈震


摘 要:本文分析了两种常用的图像去雨雪算法:帧差法和聚类法。通过比较研究两种常用图像去雨雪算法原理及流程,总结出每种算法的优缺点及适应的场景。本文结论可为图像去雨雪工作提供一定的理论基础与数据保障。
关键词:图像雨雪去除;算法分析;算法比较
1 帧差法
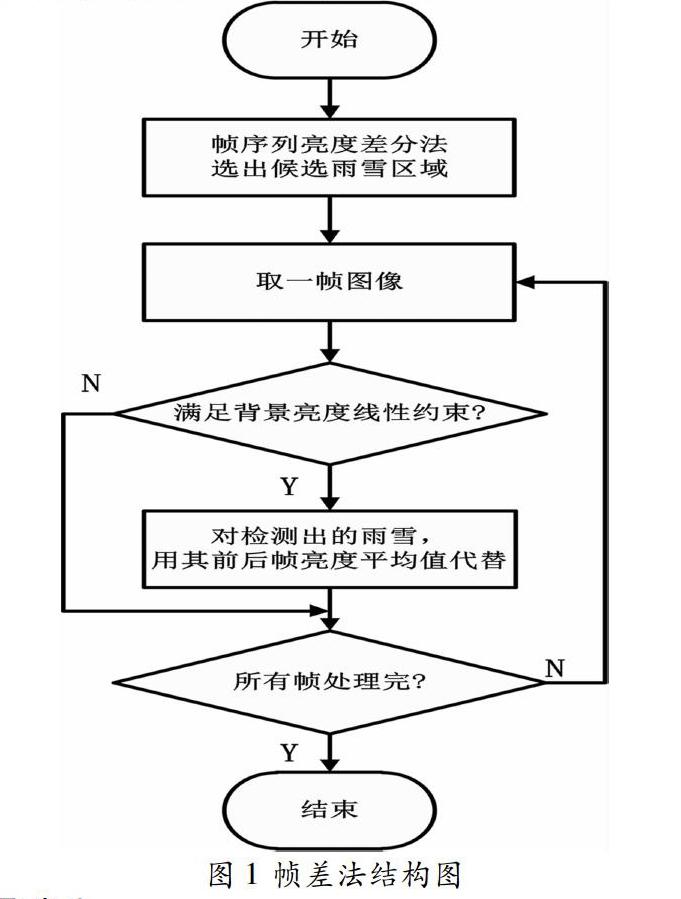
Garg等学者在2004年提出了幀差法。该算法通过分析雨雪的运动和光学特点,计算出雨雪的动力学和光学模型来识别并处理雨雪。算法首先设定两个前提条件:雨雪噪声像素的灰度值要大于背景像素的灰度值;连续两帧图像的同一位置像素不被同一雨雪噪声覆盖。接下来提取视频中连续三帧图像并判断雨雪噪声是否污染了其中第二帧图像中的像素。
ΔI=In-In-1=In-In+1≥C(1)
上式中In-1、In、In+1为视频中连续三帧图像像素点灰度值,c为灰度值差判断阈值。如果某一像素的灰度值符合式1的条件则说明其可能被雨雪噪声污染。然后从这些符合条件的像素点中进一步推算出被雨雪噪声真正污染的像素点,具体方法如下:根据雨雪噪声运动轨迹所导致的像素灰度值差异ΔI与被雨雪噪声污染的背景像素灰度值Ibg线性相关的性质来估算像素点是否被污染,即候选雨雪噪声满足下式则为真正雨雪噪声。
ΔI=-βIn-1+α(2)
式2中α,β是常数。最后在雨雪噪声区中用该帧图像的前后帧图像对应位置像素灰度值的平均值来取代该帧图像中对应像素灰度值。视频中所有帧图像重复以上操作来完成视频图像的去雨雪操作。算法结构如下所示。
2 聚类法
雨雪退化图像中像素的灰度值变化较大:某一像素被雨雪噪声污染则灰度值高,反之依然。k-means聚类法即利用雨雪退化图像这个特性对视频中任意坐标像素的灰度值聚类。该算法首先提取视频中某一坐标像素点在所有帧中的灰度值。再对这些同一像素点的灰度值采用k-means聚类。k-means聚类一开始选定两个原始聚类中心点wr与wb,为加快聚类速度,可选取像素点灰度值中的最大值和最小值。再分别计算其余像素点灰度值Ip到wr和wb的欧氏距离:
d(Ip-wr)=|Ip-wr|d(Ip-wb)=|Ip-wb|(3)
当d(Ip-wr) Wn+1=1NWn∑Ip∈WnIp(4) 式4中Wn为第n次聚类后以wn为聚类中心的灰度值集合;NWn为Wn中元素的个数;wn+1为更新后的聚类中心。当两个聚类中心灰度值稳定时聚类停止。接着将灰度值小于最终聚类中心的像素的灰度值平均值作为背景灰度。然后用背景灰度取代灰度值高于最终聚类中心的像素的灰度值。最后通过同样操作对其余坐标像素点进行处理以完成去雨雪。算法结构如下所示。 3 结论 帧差法优点为:算法简单快速,对小雨雪场景有效果。缺点为:大雨雪场景中去雨雪效果不理想;当背景像素灰度值过大时,识别的雨雪噪声区域不够准确;当退化图像中存在高速运动物体时,处理后图像中的运动物体较模糊。聚类法优点为:相比帧差法对中雨雪场景与大雨雪场景的退化图像清晰化效果较好。缺点为:算法运算量大,运算时间长;同样当背景像素灰度值过大时,对被雨雪噪声污染的像素点识别鲁棒性较低。 参考文献: [1]K.Garg,S.K.Nayar.Vision and rain.International Journal of Computer Vision,2007,75(1):3-27. [2]K.Garg,S.K.Nayar.Detection and removal of rain in videos.IEEE Conference on Computer Vision and Pattern Recognition,2004.528-535.
