减小GNSS导航定位误差的卫星方法
——GNSS导航定位误差之六
2019-11-08刘基余
刘基余
(武汉大学测绘学院,武汉 430079)
减小GNSS导航定位误差的卫星方法,主要是采用三种导航定位信号和给GNSS卫星装备星载激光后向反射镜陈列。
1 采用三种载波频率,调制多个测距码
现代的GNSS导航信号,基本上采用三种载波频率,各个载频又调制着多个测距码等信号,此处无法对这几十种导航信号一一予以分析,只能够举例说明之。
Galileo信号和GPS信号虽有许多相近之处,但是,两者却有重大差别;例如,Galileo L1A/B信号和GPS L1信号虽然共用一个载波频率(1575.42MHz),但其信号分量相差较大。仅就调制方法而言,Galileo L1A/B信号分别采用BOC(15,2.5)和BOC(1,1)调制,而GPS C/A码和P码均采用BPSK调制。因此,对它们的捕获和跟踪就需要采用相适应的软硬件;BOC信号的自相关函数是一种多个峰值函数,主峰和次峰的幅度差异较小,次峰幅度仅小于主峰幅度30%,从而增加了GNSS信号接收机分辩主次峰值的难度;若将次峰值当作主峰值进行跟踪测量,就会导致较大的测距误差,损失导航定位精度。因此,需要采用不同于捕获与跟踪传统BPSK信号的新技术,以便检测到正确的自相关峰值,实现伪距的精确测量。
GPS、GLONASS、Galileo和北斗系统的三个导航信号的频谱图如图1所示。2011年2月26日发射的GLONASS-K1卫星增设了第三个导航定位信号(L3),它的载波频率为:1201.74~1208.51MHz;并增设了码分多址(CDMA)信号,其载波频率为1202.025 MHz,该CDMA 信号简称为L3 OC(O为开放使用信号,C为CDMA)。GLONASS-K卫星发送的L3 OC信号,是采用BQPSK调制方式,而且分为数据通道(I)和导频通道(Q);该信号由下列三个部分组成:1202.025MHz的载波、10.23Mc/s的扩频码和50b/s的导航电文。L3 OC信号是由下述三个步骤生成的:一是导航电文编码。数据通道(I)导航电文速率为50b/s,采用标准的(2,1,7)非系统卷积码编码,编码后符号速率为100s/s。导频通道(Q)不包含数据。二是扩频码编码。L3 OC的扩频码包括主码和二次编码。主码是长度为10230比特的截短Kasami序列,码元速率是10.23Mc/s,导频通道(Q)和数据通道(I)的初始状态(IS)分别为nIS=62和nIS=30。导频通道和数据通道采用不同的二次编码,导频通道采用10比特的Neuman-Hoffman(纽曼霍夫曼)码(简称为NH码,NH=1111001010),数据通道采用5比特的Baker(巴克)码(BC=11101);这两个二次编码的字符速率是每个代码字符1msec。三是载波的频率为1175×1.023 MHz=1202.025 MHz,它用BPSK调制生成L3 OC信号。GLONASS L3 OC信号是一种高精度和高可靠的民用公开服务信号,该信号与GPS L5信号具有相似性,两者的调制方式、电文编码、扩频码和二次编码都有很多相似之处。

图1 四大系统的导航信号频谱
当用第一、第二、第三GPS导航定位信号进行运动载体的导航定位时,可知下列GPS信号接收机至GPS卫星距离(ρ)的观测方程:

式中,

式中,Φi是以周为单位的第i个载波的滞后相位观测值(此处,i=1,2,5下同)。
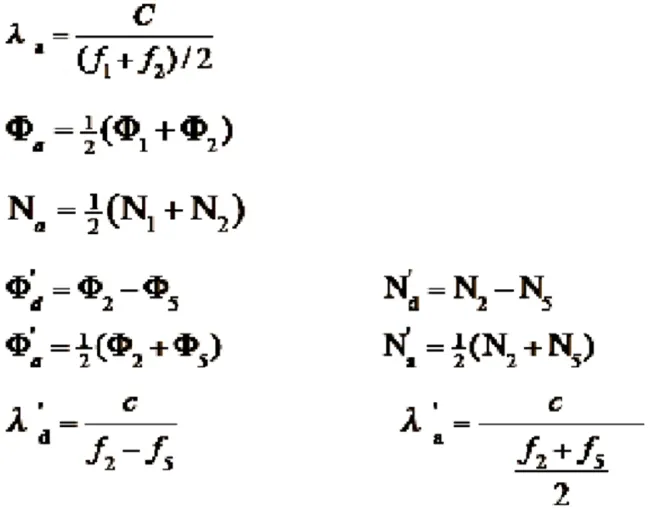
式中,Ni为第i个载波的整周模糊度(波数);λi为第i个载波的波长;Pi为以米为单位的伪距离;fi为第i个载波的频率。
从上列方程可见:
⊙用按上述公式算得的宽窄巷载波相位测量值(ΦdΦaΦd'Φa'),
以及它们的波长(λdλaλd'λa')和波数(NdNaNd'Na'),可
以精确地求得站星距离(ρ)。
⊙由于采用GPS载波相位/伪距测量值进行组合解算,而消
除了电离层效应的影响。
⊙用式(1)所表示的无电离层效应影响的站星距离(ρ)
解算出的用户位置,不仅精度较高,而且能够确保所求解的
用户位置的置信度。
此外,因λ'd=5.865m,而能更准确地求得波数N'd,有益于用OTF解算实时在航点位。OTF算法的首要问题是,求定载波相位测量整周模糊度的初始值。当用调制在上列三个载波上的一个伪噪声码测得三个伪距(PL1、PL2和PL5)时,则可快速求得载波相位测量整周模糊度的初始值(N0i)。由该种方法求得的整周模糊度的初始值,比按现行双频观测值求得的整周模糊度的初始值要更接近整周模糊度的正确值,而可缩小整周模糊度的搜索区间;大大加速解算整周模糊度正确值的速度;这可为高动态环境下应用GPS载波相位测量创造了很好的工作基础,开拓GPS动态载波相位测量的应用新天地。
2 GNSS卫星装备着星载激光后向反射镜陈列
导航卫星在轨位置的误差大小,直接影响运动载体7维状态参数的测量精度;因此,如何精确测定导航卫星的轨道参数,准确地预报导航卫星的运行轨道,是实现高精度导航定位的关键问题。毫米级精度的卫星激光测距成果,是校验导航卫星微波定轨的最佳外部基准,而能够评定导航卫星的星历精度,监测导航卫星的星钟运行优劣,提供导航卫星坐标系的大地测量基准,计算导航坐标系的精度因子;因此,被现代的导航卫星广为采用;现行的GLONASS全球导航卫星系统、北斗卫星导航系统、Galileo全球导航卫星系统、QZSS准天顶卫星系统和IRNSS印度区域导航卫星系统,都给他们的在轨导航卫星装配了星载激光后向反射镜阵列(Satellite-borne Laser Retroreflector Array,图2表示北斗MEO卫星和GEO/IGSO卫星所载的星载激光后向反射镜阵列),以便进行卫星激光测距(SLR,Satellite Laser Ranging),实施导航卫星的激光定轨;2019年将发射的GPS III卫星也将步其后尘而行之。

图2 北斗MEO卫星和GEO/IGSO卫星的星载激光后向反射镜阵列
注:图片中的MEO表示MEO卫星所载的激光后向反射镜阵列;GEO/IGSO表示GEO/IGSO卫星所载的激光后向反射镜阵列。
关于GNSS卫星装备星载激光后向反射镜阵列可以精化GNSS星历的功能,请参阅刘基余的“卫星激光测距用于GNSS星历精化的现况与发展—— GNSS导航信号的收发问题之九”一文(《数字通信世界》,2014年第12期,P.1~11)。