一种标准路面激励下的车轮动态负载研究
2019-11-07燕玉林张运银解建一黄捷音
燕玉林,张运银,解建一,黄捷音
(1.陆军装甲兵学院 陆战平台全电化技术实验室,北京 100072; 2.驻四四七厂军事代表室,内蒙古 包头 014030)
车辆匀速驶过平直路面会产生恒定轮胎力,由于实际道路表面形状不规则,导致轮胎受力波动,产生连续变化负载[1-2]。动态负载易造成轮轴疲劳损伤,同时影响轮毂电机寿命。因此,研究确定车轮动态负载对电机选择和车辆结构优化有重要意义。
当前有关动态负载研究,大多针对车辆部件疲劳损伤的载荷谱[3-4]。载荷谱属于统计数据,不能实时反映车辆位置与车轮负载的关系。道路重构技术大多采用Matlab软件编程,过程繁琐,程序复杂。本文基于ADAMS软件搭建整车动力学模型[5],构建等级路面,研究直驶工况下不同路面与车速对车轮动态负载的影响。
1 车-路系统动力学模型
1.1 整车模型搭建
研究对象是包含多个精细结构的复杂系统,为简化模型只对车轮负载产生主要影响的部件建模,主要包括车身、悬架、双桥转向系统、轮胎模型。车辆的主要技术参数如表1所示。车辆坐标系定义如图1(a)所示:X轴为车辆前进的方向,向后为正;Y轴为车身的侧向方向,指向车身右侧为正;Z轴为垂直于地面的方向,向上为正,Z轴的负方向为重力加速度的方向。
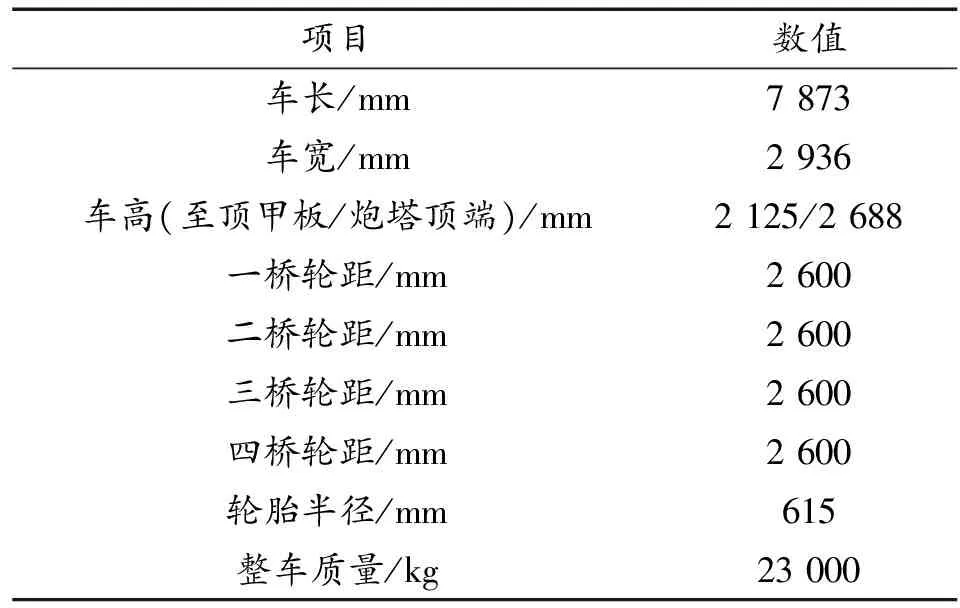
表1 整车基本性能参数

图1 车-路系统动力学模型
车身是根据实车质量和转动惯量构建3D刚体模型。悬架由ADAMS/Car中对麦弗逊式独立悬架进行合理结构简化得到,其模型如图2所示。一、二桥为滑柱摆臂式独立悬架,三、四桥为单纵臂式独立悬架,悬架刚度系数为2 700,弹簧阻尼系数为800。

图2 悬架系模型
车辆最大转角分别为:一桥内轮37°,一桥外轮30°,二桥内轮25°,二桥外轮23°。本车采用前两桥转向方式,转向系结构模型如图3所示,包含18个约束副,其中有球形副5个,旋转副6个圆柱副3个,万向副2个,移动副和固定副各1个,共17个自由度。

图3 转向系模型
Adams中有四种轮胎模型可供选择:Fiala轮胎模型、UA轮胎模型、Magic-Formula(MF)轮胎模型和FTire轮胎模型[6]。PAC2002模型是基于TYDEX-W轮胎坐标系开发的仿真版MF-Tire模型,具有MF-Tyre相同功能,根据仿真工况的不同可在稳态和非稳态之间切换,具有更高的仿真精度。在此侧重研究车轮受地面作用的力和力矩,故采用PAC2002轮胎做仿真分析,具体轮胎参数见表2。

表2 轮胎特性参数
1.2 等级路面生成
文献[7]认为路面服从均值为零的正态分布,标准路面模型就是通过路面空间功率谱密度与空间频率的关系描述,其表示为
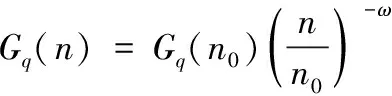
(1)
式中:n为空间频率(m-1),是波长λ的倒数;n0为参考空间频率n0=0.1 m-1;Gq(n0)为在n0下的路面谱系数;ω是拟合功率谱密度指数,ω=2。
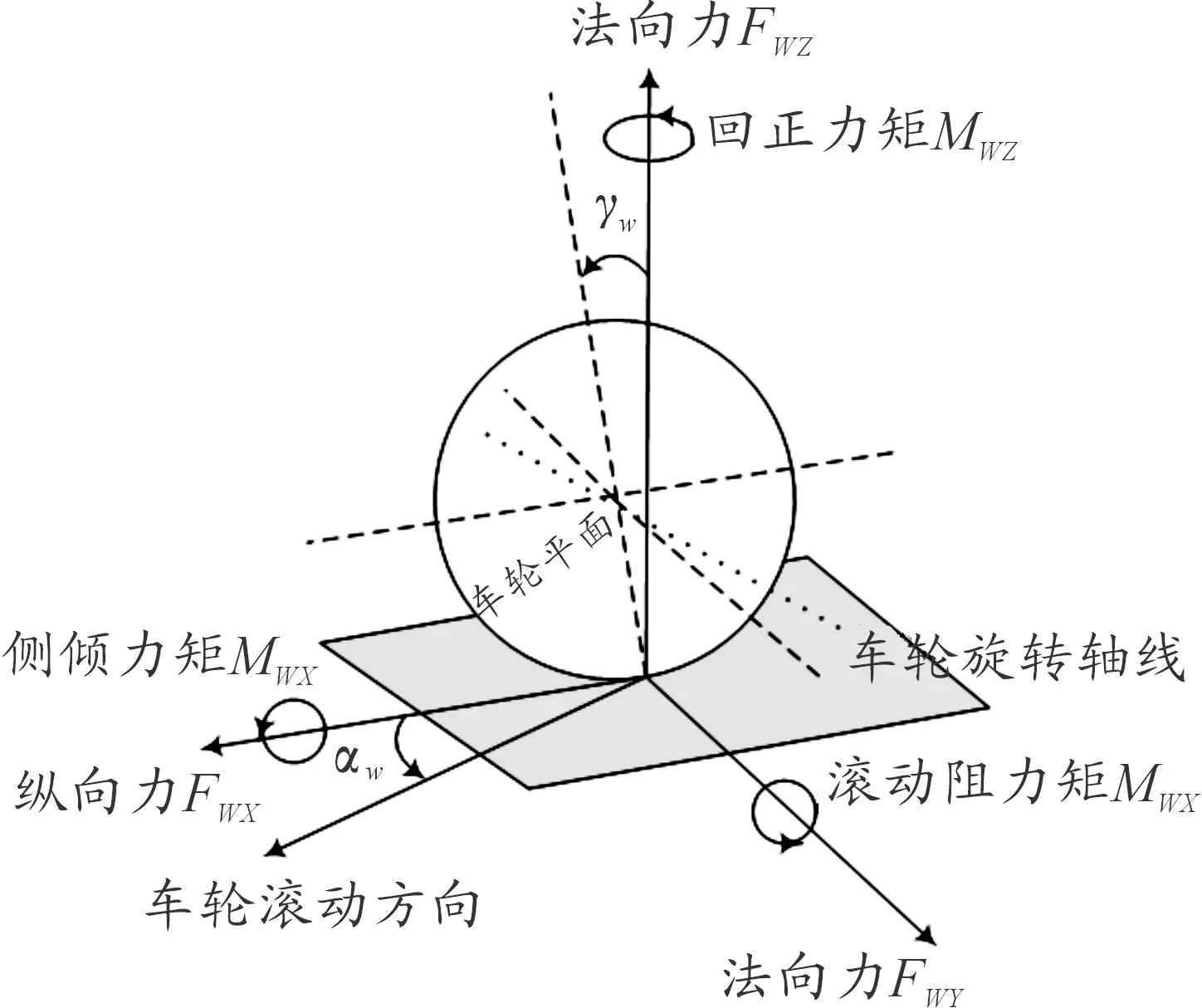
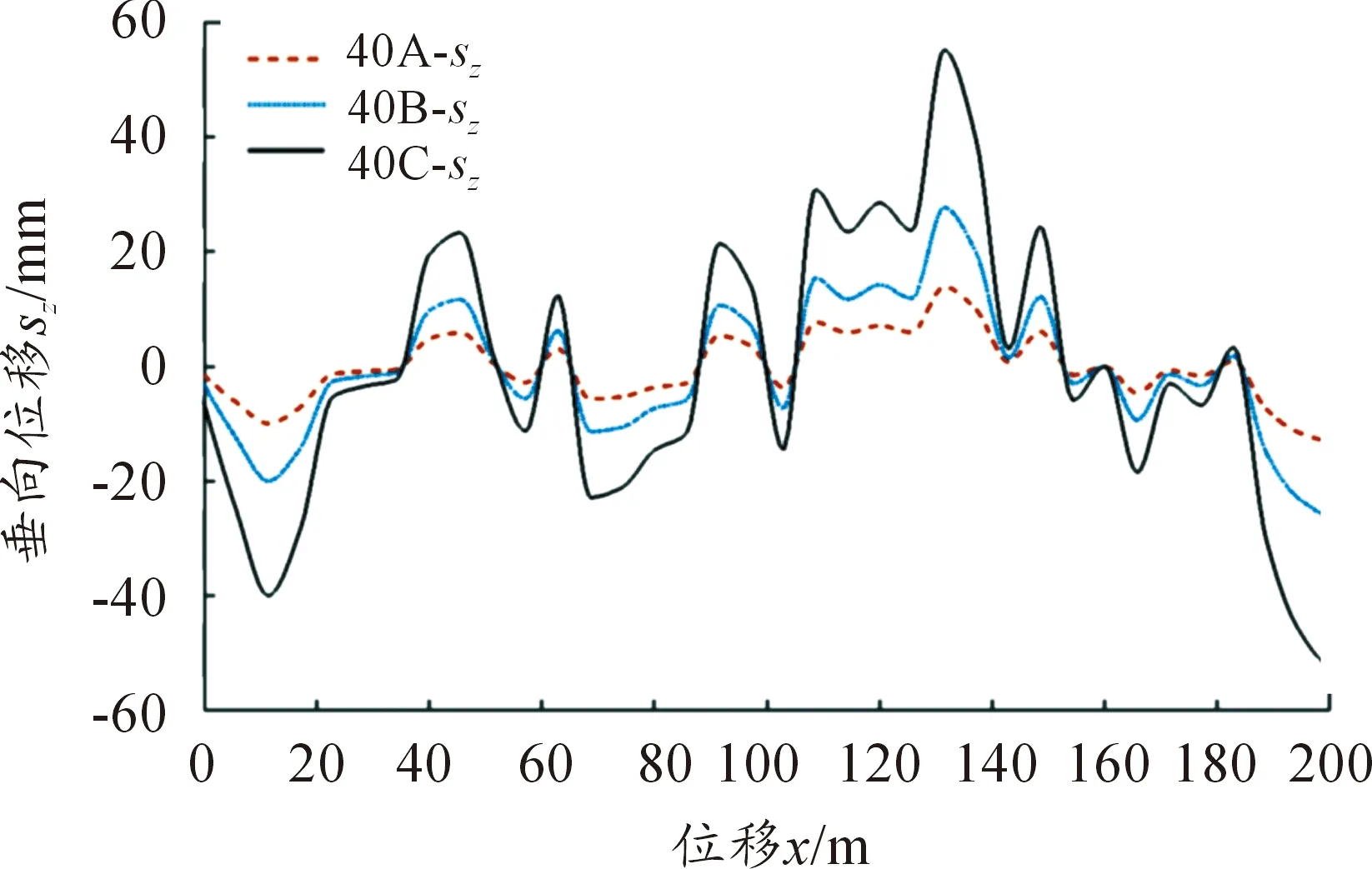
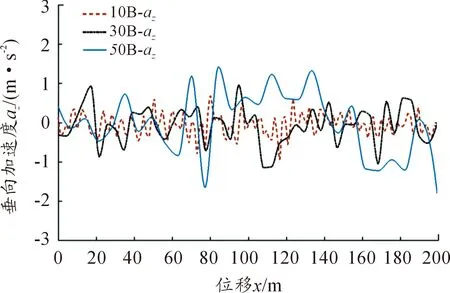
GB7031把路面分成8级,对各级路面不平系数Gq(n0)的几何平均值和0.011 m-1 表3 等级路面换算表(部分) Sayers数字模型是一种经验模型,综合了许多不同类型道路测量参数[8],表示了路面空间功率谱密度与空间频率的关系,即: (2) 式中右侧3个参数均由独立的白噪声获得,分别是:Ge为空间功率谱密度幅值;Gs为速度功率谱密度幅值;Ga为加速度功率谱密度幅值。 每个白噪声是均值为零,标准差σ为的高斯白噪声。标准差与功率谱密度的关系为 (3) 式中,G为Ge、Gs或者Ga;Δ为采样间隔。 Sayers模型是Adams采用的路面模型,软件自带6种形式路面不能与标准等级路面相对应,需要进行数值转化。将Ge和Ga置零,令Sayers模型与标准路面相等,则有: (4) 根据式(4),标准路面模型向Sayers模型的Ge、Gs和Ga转化参数见表3,通过修改Adams中ROUGHNESS路面属性文件相应生成标准等级路面。 基于以上理论构建国家标准B级路面,以距离的方式定义随机路障的位置,假设左右两侧轮胎接触地面的摩擦系数和随机路障位置一致,即左右轨迹完全相关。截取部分路面属性文件见图4。 图4 部分路面属性文件 上文所建虚拟路面属于单道随机路面,左右相关函数等于1,需进行不平度功率谱估计[9-12],来考察仿真的可信度。选择车速u=50 d*time时的B级路面,获取路面不平度的PSD并返回与之对应的线性频率n,与GB7031规定的B级路面理论功率谱密度对比。选取车轮轴心处MARKER_637作为参考点,截取粗糙段将时域信号转化为路面不平度频域信号如图5所示。采用平均周期图法对粗糙路段进行功率谱密度估计,窗函数选择矩形窗,分段长度为256点,重叠点为128。对频域信号进行谱密度估计结果如图6所示。 图5 B级路面不平度频域信号 图6 拟合功率谱密度与理论功率谱密度 从图5和图6中可以看出:由Sayers模型所拟合的路面不平度功率谱密度与理论功率谱密度吻合。少量误差来源于两方面,高频偏离是由于傅里叶变换产生的频率混叠造成,低频偏离是由于样本长度不可能无限长造成。由此验证了该方法可行,生成路面可用于进一步仿真分析。 TYDEX-W轮胎坐标系如图7所示,采用了与ISO版轮胎坐标系相同的正方向和不同的原点[13-15]。结合Magic-Formula魔术公式对轮胎接地点六分力进行解算,其数学表达式如下: (5) 式中:Y(X)表示输出变量:纵向力FWX、侧向力FWY或回正力矩MWZ;X表示输入变量:纵向滑移率KW或侧偏角α;系数B、C、D、E分别表示刚度因子、曲线形状因子、峰值因子以及曲率因子,是由轮胎的垂直载荷以及外倾角决定的;SV、SH分别表示曲线在垂直方向和水平方向的漂移量。 图7 轮胎TYDEX-W坐标系 轮胎的回正力矩是由于侧向力与轮胎接地点存在拖距t而产生,t与侧偏角α有关,回正力矩MWZ可表示为 MWZ=-t×FWY+MZR (6) (7) 式中:MZR是残余回正力矩;气胎拖距t是在αt=0时取峰值Dt,其中,Bt峰值附近的曲率,Et大滑移率下的曲线形状有影响,Ct为曲线的形状因子。 纯纵向滑移时的轮胎纵向力为 (8) 纯侧向滑移时的轮胎侧偏力为 (9) 联合滑移时的轮胎纵向力和侧偏力分别为: (10) (11) 其中:αW、KW、FWZ、γW为输入变量,FWZ、FWY为输出变量。其他参数含义与上文魔术公式中参数一致,均由试验数据拟合得到。 研究对象采用轮毂电机驱动,行星排减速器传动比n=11。电机的基本性能参数见表5。根据转速和力矩的逆向传递方式进行电机输出端负载分析。 表5 电机基本性能参数 由车轮动力学方程可得驱动力矩为 (12) 式中,i=1,2,3,4代表轴;j=1,2代表左右车轮;TW为车轮的输入转矩;rW为车轮半径;Tbrk为制动转矩;f为滚动阻力系数;JW为车轮转动惯量;ωW为车轮转速。 减速器输出轴上的转矩和输入轴上的角速度分别为 Tf out=(Tf in-ΔTJf)nηf (13) (14) ωf in=ωf outn (15) 式中:Tf out、Tf in为减速器输出和输入轴上的转矩;ΔTJf为减速器自身的惯性转矩;Jf为减速器转动惯量;ωf in、ωf out为减速器输入和输出的角速度;ηf为减速器的传动效率。 根据单个车轮上电机输出力矩TM=Tf in,Tout=TW可算出电机输出端负载为 (16) 通过仿真实验获取轮胎的受力和旋转角加速度,逆向解算轮毂电机输出端负载转矩。 设定车辆行进过程中Tbrk=0,仿真车速为40 km/h,仿真时间为40 s,仿真步长为0.04 s,仿真路面选择A、B、C三个等级分别进行仿真。对粗糙路段0~200 m位移上相关数据进行采样,分析车轮动态响应,比较不同路面下的车轮响应。其中,A、B、C三级标准路面表述如表4所示。 表4 路面等级分类 由图8可见车轮受路面随机激励,垂直方向位移响应与纵向位移曲线,其中A级路面路道条件最好,车轮垂向位移响应幅度较小,振幅最大值是17.6 mm。C级路面起伏最大,振幅最大为70.4 mm,C级路面上大部分垂向位移都在60 mm以下,也比A、B级路面振幅大。由此可见,不同路面随机激励对车轮垂向位移影响较大,路况越差,所引起的车轮振幅越大。 图8 40 km/h时A、B、C级路面工况下车轮垂向位移曲线 通过仿真得到车轮垂向加速度和车辆位置关系曲线见图9。A级路面下最大加速度为0.9 m/s2;B级路面下最大加速度为1.9 m/s2;C级路面下幅值变化最大,其大部分加速度均小于3 m/s2,最大峰值为4 m/s2,相比其他路面,幅值差距明显。不平路面上车轮垂向速度方向变化很频繁,大小随着路面激励增大而增大。 图9 40 km/h时A、B、C级路面工况下车轮垂向加速度曲线 图10给出车轮驱动电机负载转矩随车辆位置变化的曲线。负载转矩反映了路面不平度激励的特性。通过对比发现,车速相同时,不同路面下的负载转矩变化趋势完全一致,其中C级路面下,负载值最大,超过200 N·m。反映出驱动电机随着路面等级的变差,负载转矩变大。 设定Tbrk=0,路面为B级路面,车速分别选择10 km/h,30 km/h,50 km/h。依次进行仿真分析。 由图11可见不同车速下,车轮垂向位移随车辆位置变化规律基本一致,随着车速的增加,车轮垂向位移变化曲线变得平滑,这是由于采样的空间间隔相等,车速越高,经过单位位移时间越短,采集的高频信号越少造成。 图10 40 km/h时车轮驱动电机负载转矩曲线 图11 B级路面时10 km/h、30 km/h、50 km/h车速工况车轮垂向位移曲线 各车速工况下车轮垂向加速度与车辆位置曲线如图12所示。车速50 km/h时车轮垂向加速度最大值比车速10 km/h时高52.2%;由此可知,车速在中低速时,对车轮垂向加速度影响较小,在高速时影响很大。 图12 B级路面时10 km/h、30 km/h、50 km/h车速工况车轮垂向加速度曲线 车轮驱动电机的输出负载转矩与车辆位置曲线见图13。车速50 km/h比10 km/h时电机负载峰值增加了近一倍。随着车速的升高,电机负载值增大,大幅值点增多,车速对车轮受力和电机负载均有重大影响。 结果表明:随着路面等级变差,车轮垂向加速度幅值变大,车轮驱动电机负载转矩变大。车速对车轮动态负载影响较大,车速增加导致车轮垂向加速度明显增大,不利车辆稳定,说明粗糙程度大的路面不适宜高车速。在中低速段,车轮电机负载转矩明显增大;在高速段,负载转矩峰值不再增加,但大幅值频次增加,对电机影响重大。 图13 B级路面时车轮驱动电机负载转矩曲线 所搭建路面模型符合标准功率谱密度,车辆轮胎对道路作用响应良好,路面条件和车速均对车轮动态负载有不同程度影响。 结果充分体现了路面和车速对车轮垂向运动的影响,为车身稳定性和乘坐舒适性研究提供了数据参考。负载-位移历程准确描述了驱动电机负载转矩与车辆位置关系,对进一步的实时加载试验具有重要应用意义。




1.3 虚拟路面特性验证


2 车轮动态负载分析
2.1 轮胎力学分析




2.2 驱动系统负载分析




3 仿真与分析
3.1 不同路面工况车轮动态响应


3.2 不同车速工况车轮动态响应



4 结论