基于UPD70F3614单片机汽车方向柱锁电控系统设计
2019-11-06石勇湛腾西黄吉吴国玺唐宇航欧先锋
石勇 湛腾西 黄吉 吴国玺 唐宇航 欧先锋

摘要:设计了一款以UPD70F3614为核心CPU的汽车方向柱锁(ESCL)控制系统。系统包含分布式电源设计、双CPU控制,CAN外部通信,主副CPU内部通信,H桥电机驱动模块及相关软启动控制。介绍了ESCL各模块基本原理与实现方法,并对系统的基本测试方法进行了介绍,本系统的设计完成了初样并得到了较好的验证。
关键词:方向柱锁;双CPU;H桥驱动;内外通信
中图分类号:TP391文献标志码:A 文章编号:2095-5383(2019)03-0031-05
汽车方向柱锁(ESCL)电控系统是挂在汽车电子系统CAN总线上的一个模块。这个模块可以是汽车一键启动系统(PEPS)的一个组成部分,也可以接收来自CAN总线的其他模块的信令;其工作环境恶劣,低功耗及可靠性要求较高。本文提出了一种ESCL电控系统设计方案,该设计在汽车电子锁柱配套厂家的委托研发项目中得到了较好的实现与验证。
1方向柱锁设计说明
1.1方案简介
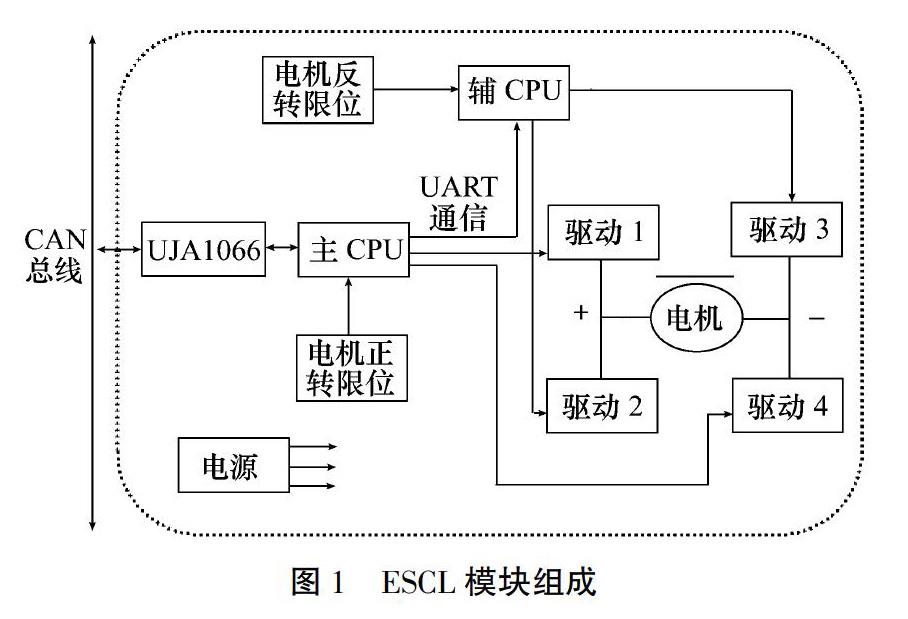
本款ESCL电控系统能收发CAN总线上的信令;硬件方面采用双CPU结构设计,H桥驱动模式控制电机正反转;主CPU采用UPD70F3614,副CPU采用PICl6F1933:软件方面需要设计双CPU内部通信接口程序,H桥驱动程序,外部通信接口程序。ESCL与外部通信由主CPU通过CAN总线及相关汽车总成模拟协议实现;内部主副CPU通信通过UART内部通信协议采用主从式通信方式实现。ESCL各模块组成如图1所示。
1.2各硬件模块设计
1.2.1主控CPU模块
电子方向柱锁作为汽车上使用的部件,其低功耗、安全可靠性、环境适应性要求高;主控CPU作为核心部件,更为重要。在设计时选用汽车电子专用CPU制造商日本瑞萨科技公司的UPD70F3614单片机。
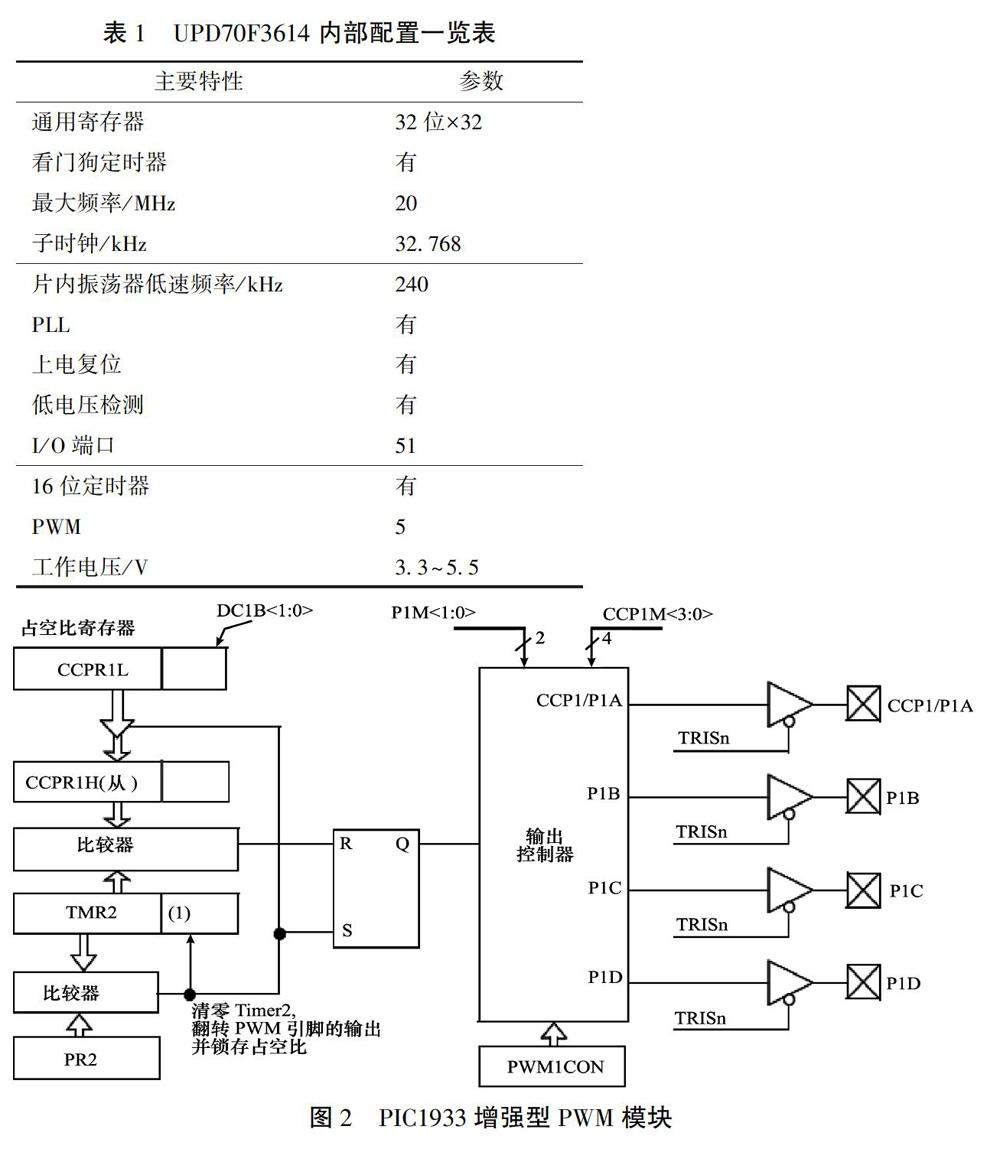
UPD70F3614单片机属于V850ES/FX系列V850ES/FX3-L组,其工作环境温度为-40-125℃,这可以保证汽车方向柱锁在复杂环境气候下使用的可靠性。UPD70F3614主要特性参数如表1所示。
在芯片记忆能力方面,程序存储器具备256KB闪存,而RAM为16KB,且具备掉电数据保护能力。信息交流方面,UPD70F3614单片机需要与一键启动基站等CAN总线或其他通信总线模块进行信息交流,而它提供了充足的接口。如1个CAN通道,2个LIN通道.2个CSIs通道,2个UART通道.1个I2C通道,其中的CAN总线通信及LIN总线通信为两者通信提供了支持,具有丰富的数据通信接口;同时还拥有10位x10通道的A/D转换器,也具备良好模数转换能力。
1.2.2副控CPU
副控CPU选用PICl6F1933,其功能主要是控制电机的反转。PICl6F1933是一款采用納瓦技术的28脚8位CMOS闪存单片机,具有高性能、低功耗的优良特性。
PIC16F1933具有可编程、故障可检的高精度内部振荡器,可控范围从31kHz~8MHz;宽工作电压范围(2~5.5v);环境适应性可达工业及拓展型工作范围,具有上电、掉电复位功能;高耐用性闪存;低功耗特性方面,首先,具有节能休眠机制;其次待机电流2.0v时典型值50ua,频率32kHz、电压2.0v时工作电流仅为11ua,频率4MHz、电压2.0v时工作电流也只有220ua;2.0v时看门狗定时器电流典型值为1uA。这些低功耗特性,都是汽车电子系统设计时的优选指标。
PIC16F1933具有增强型PWM模式能在最多4个不同的引脚上产生分辨率最高为10位的PWM信号。通过单输出、半桥输出、全桥输出正向模式、全桥输出反向模式四种PWM输出模式实现:要选择一种增强型PWM模式,只须对特殊功能寄存器CCPlCON中的P1M位进行适当设置。PWM输出与I/O引脚复用,并被称为P1A、P1B、P1C和P1D。PWM引脚的极性是可配置的.通过对CCPlCON寄存器中的CCPlM位进行适当设置来选择极性。增强型PWM模块的简化框图如图2所示。此PWM功能可用于电机反转控制的软启停技术。
1.2.3分布式电源设计
汽车电源由于采用蓄电池供电,输入电压波动大,稳压难度大。依据主、副控CPU均需在很小的电压波动幅度下工作这一特性,当工作电压变化幅度过大,将降低能耗效率,同时也会对单片机、对ESCL各模块工作稳定性产生影响。所以,ESCL需要一个能应对宽电压输入波动,同时具有高稳定输出的一个电源模块,确保系统正常运行。分布式电源设计如图3所示。
由于系统采用双CPU设计,故2个不同的CPU采用分布式供电。辅控CPU PICl933具有较宽的工作电压范围,工作电压波动范围可达2.0~5.5v。与之配套的电源DC-DC变换芯片是L4949ED。这个芯片输入电压的变化范围为DC 5~28v,有23v左右的允许波动范围。输出电压稳定度5V±1%,其电流输出可达到100mA。完全可以满足本设计中PIC1933单片机最小系统的正常工作。如图3所示,DC-DC变换电路L4949ED其输出VDD为TFL电平工作部件供电,除给PICl933供电外,同时还给主控CPU UPD70F3614的B-E组10口供电,故VDD功率为这两组供电功率之和。从这一个支路来分析,蓄电池电压输入在DC 10.8~14.8v约有4v左右的波动范围,远小于L4949ED允许23v的波动范围。第2个分布式支路,由三端稳压器NCV4264来完成。输入也是宽范围DC(4.5~45v),也完全覆盖了汽车蓄电池电压的波动范围。这两个芯片具有良好的抗输入电压波动的能力。NCV4264输出电压如图3所示EVDD(3.3v)给主控CPU供电,主要为CMOS电平部件供电。第3个电源支路是复合性芯片UJA1066芯片内的电源管理单元。此电路内的电源管理单元内的两个输出,V1为5v,为TFL电平工作单元及上拉部件供电。V2为3.3v,为CAN总线等CMOS工作单元供电;电机驱动单元主电源由14v蓄电池输入电源直接供电。
2ESCL中的通信问题
2.1ECSL模块对外的CAN总线通信
在汽车电子技术的发展过程中.出于对安全性能、舒适度、便捷性、低公害、性价比的需求,许多电控系统被工程师开发出来。为适应“减少线束的数量”“借助多个LAN,大量数据的高速通信”的需要,德国电气商博世公司在1986年开发出了面向汽车的CAN总线通信协议,现已是欧洲汽车网络的标准协议。CAN总线通信也已经ISO国际标准化组织确认14J。
CAN总线上的通信节点没有主从的分别,各节点都可以在总线空闲时互相通信。CAN总线最高通信速率可达1Mbit/s,通信距离最长可达30m。CAN总线通信因为其高效性,用于主控芯片UPD70F3614与一键启动系统基站及其他CAN总线模块的通信。其CAN通信单元架构如图4所示。CAN通信的建立需要CAN初始化时要对时钟、位定时、通信速度、接收规则、缓冲区设置。(包括对时钟和10配置)、CAN数据发送、CAN数据接收、主函数等模块。模块在待机过程中,可接收不同ID,与本模块ID不断进行比对.比对正确表示总线呼叫本模块,启动相应中断,收发相关信息。
2.2ESCL双CPU内部通信
主CPU UPD70F3614单片机与副CPU PICl6F1933之间采用UART异步串行接口实现。
主副CPU之间的通信数据量不高,采用1200bit/s。自定义通信协议如表2所示。
因为是两个CPU控制一个直流电机.所以务必对整个ESCL的当前状态进行标注,定义为“锁柱状态”。锁柱状态与限位开关的状态具有对应关系。限位开关状态标注为“开关状态”。正常运转时,锁柱状态与开关状态的对应关系是逻辑正确的。如果出现机械故障,软件将分析故障类型,填入故障状态中,主副CPU协同判定,由主CPU向汽车一键启动系统上传故障状态。主CPU控制正转,副CPU控制反转。如主CPU发出正转命令后,经软启动+正常运行+软停止时间后,有一个总的延时上限,如超过这个上限,系统还没有收到正转限位开关的信号,这可认定为可能出现故障。故障类型有可能是限位开关的机械故障,也可能是电机本身的故障等等。其判定还需要进行信息融合。例如如果怀疑正转限位开关故障,则还需结合汽车停车时反转锁车时反转限位开关动作是否正常,如果正常则可从反转位开始进行延时测试,看是否从反转位限位开关开始延时后可以观察到正转延时开关的正确状态,多要素融合判定后才能定义故障类型。
3系统测试
3.1系统初样与调试测试
系统初样PCB必须在项目所提供的方向柱锁执行器的装配空间内完成。
由于方向柱锁执行器空间有限。电控系统必须在有限的空间内配合机械布局实现设计。设计任务只能在双面布局元器件,双面装配,全面使用贴片元件的前提下才能完成。电控系统初样设计因有前期软件调试的需要,主副两个CPU必须设计有2个标准的下载接口,主CPU是DIPl4芯,副控CPU是单列5芯。正样时,此2个显性标准接口可隐去,用测试针替代。调试过程采用按单元分布式调试方法实现。先调通第1调试单元的电源部分,如图6所示。实际调试时,由于主CPU在电路板的A面,副CPU在电路板的B面以及限位开关的信号必须装配在方向柱锁本体内才能调试等原因,初样调试时,用3块PCB板装配了3个单元,第1个调试单元主要装配分布式电源系统,并要首先调试通过,才能装配第1单元的其他元器件。因电源系统不正常时,相关电路容易损坏,所以在此基础上装配第1个调试单元的主控、副控CPU等相关部件。第1个调试单元可以用于独立调试对外CAN通信。
可以用于调试主副控CPU的内部通信。限位开关也可以装配在第1个调试单元内,以便于模拟方向柱锁执行体的限位开关动作。如图6所示,第2个单元是直流电机的H桥驱动电路,单独装配了1个调试单元,主要是由于驱动芯片5050的+14v供电不在引脚上,而在贴片电路的反面散热片上,所以初样装配采用手工装配时要进行特殊处理。但因为初样的第1个调试单元有2个下载器接口,故不能直接装入方向柱锁本体内。电路板设计时,2个限位开关与方向柱锁本体机械动作的准确位置是对应的。故在实际联调时,必须要有第3个单元,主要是2个限位器单元,这个单元中装2个限位器,调试电路的联接关系上与第1个单元的2个限位器是并联关系。2个单元内的限位开关信号均有效,一个是模拟调试时有限,一个是实际联调时有效。以上3个单元的调试可以分布式开展,总电源由实验室的3A,DC0-30v可调电源输出14v实现。如果第1单元的分布式电源系统出现故障,可以直接由实验室双路电源一路输出5v,一路输出14v供电,可以进行这3个单元的调试。
电子方向柱锁的测试可以分为2部分,第1部分是通信模块的测试,包括模块对外的CAN总线通信、对内的UART通信;第2部分是电机驱动模块的测试,需要在使用过程中进行包括电机的正反转测试软启动测试。最后通过搭建一个简易汽车方向柱锁调试测试系统.进行汽车电子方向柱锁的系统测试。
3.2通信模块测试
方向柱锁CAN总线的调试采用ECANtools调试软件。与之配套的调试器为USBCAN-IIPro。
ECANTools调试软件有几种工作模式,可以专门作为输入,也可以双工输入输出,也可专门作为输出节点。CAN总线调试界面如图7所示。如果调试主控CPU UPD70F3614(如图4所示)的CAN总线专用通信单元时,ECANTools調试软件可工作在接收模式。此时ESCL作为一个汽车电子系统中CAN总线的一个节点,可以呼叫所有相关的节点,这些节点可以是一键启动系统中的一个节点,如一键启动PEPS系统中的基站节点;也可以是非PEPS系统中的车身处理系统节点。
对2个CPU之间UART通信的调测,可采用通用的串口调式软件就可以实现,如串口猎人这样的集成串口通信软件,并采用本文3.2节所述自定义内部通信协议进行通信,先对单个的CPU进行调试,单CPU调试成功后,两个CPU联调就可以了。定义UART通信波特率为1200bit/s。
4总结
本文是基于UPD70F3614单片机的智能汽车方向柱锁电控系统设计实现。本文说明了方向柱锁的原理及分模块的实现过程。并对系统调试进行了全景式说明,并对有关模块测试测试进行了具体说明。在汽车锁具配套厂家及有关项目资助下,一种新型的汽车方向柱锁ESCL电控系统完成了项目初样,设计原理与测试方法得到了较好的验证。ESCL电控系统小批量的设计验证工作正在进行中。
