基于Petri网的电磁循迹小车控制程序建模
2019-11-06邓雪峰董文嫘冯灵清柏元利
邓雪峰 董文嫘 冯灵清 柏元利
摘 要:電磁循迹小车是物联网技术发展到一定阶段的产物。电磁循迹小车的控制程序设计是电磁循迹小车正确行驶的关键因素,为了保证控制程序的正确性,采用了Petri网对电磁循迹小车的控制程序进行建模,并利用可达图对模型进行了特性分析。结果表明,利用Petri网对控制程序进行建模可以保证控制程序的控制逻辑设计正确,提升电磁循迹小车设计的可靠性。
关键词:电磁循迹小车;程序设计;Petri网;程序建模;物联网技术;电磁感应技术
中图分类号:TP311.1文献标识码:A文章编号:2095-1302(2019)09-00-02
0 引 言
随着物联网技术与工业、物流等领域的深度融合,智能的小车可以实现自动地按照指定的路线行进,这给生产过程和日常生活都带来了极大的便利[1-3]。因此智能循迹小车的研究一直以来也是物联网领域的一个研究热点问题。当前的技术背景下,采用电磁感应为主要感应技术的循迹小车在许多应用中由于感应技术比较成熟,已经被广泛的采用[4-6]。
在智能小车的循迹设计中,一般采用高速的单片机作为小车的主要控制核心,此单片机完成小车的智能控制,包括循迹、速度控制等操作。由于核心控制部分同时完成多种功能的控制,其设计的正确性是智能小车设计成败的关键因素。在小车的试验过程中,经常出现由于设计的缺陷引起的小车失控事件,一般都是由于在设计核心控制模块时控制逻辑出现不合理设计而产生的。目前,Petri网作为一种建模工具已经广泛应用于工业系统设计的建模[7-10]。本文针对小车控制模块设计的问题,采用Petri网作为电磁小车控制部分模块建模的工具,对小车的设计进行建模验证,从而保证小车的控制逻辑的正确。
1 电磁循迹小车控制程序设计
1.1 电磁循迹小车的控制的基本原理
电磁循迹小车一般采用电磁感应传感器作为小车循迹的信号采集器,感应部件采集到轨迹信息,然后经过信号放大、转换等过程,转换为数字信号。数字信号输入到核心控制模块,一般由高速单片机等智能器件作为主控制程序的运行器件,核心控制模块将对传感器输入的轨迹信息进行判断,从而决定小车的驱动电路如何工作。本文采用两个传感器作为小车轨迹检测传感器,左、右两个传感器分别位于车头的两侧,可以检测地面上的金属丝制作的轨迹。当传感器检测到金属丝时,产生低电平,形成信号0;未检测到金属丝时,保持高电平,形成信号1。控制部分依据左右传感器产生的数字信号,形成判断逻辑,从而控制小车的方向。
1.2 电磁循迹小车的控制模块设计
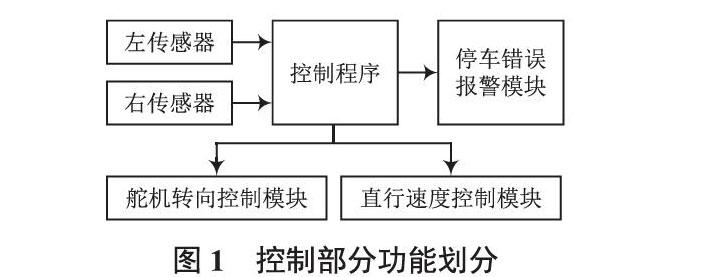
依据第1.1节所述的基本原理,电磁循迹小车的控制部分的主要功能如图1所示。
(1)传感器信号转换模块包括小车前端的左、右两个传感器的信号采集及转换。
(2)控制程序主要完成信号的处理分析,并且实现对转向、速度及停车的出错控制。
(3)舵机转向控制模块实现对舵机的转向控制,接收控制程序发来的转向信号,对舵机进行相应的控制。
(4)直行速度控制模块依据控制程序发送的速度高速信号,驱动速度相关电机进行速度调整。
(5)停车错误报警模块在小车行驶中,对意外出轨等情况进行停车报警,通知相关人员进行错误处理。
2 电磁循迹小车控制程序建模
2.2 控制程序建模
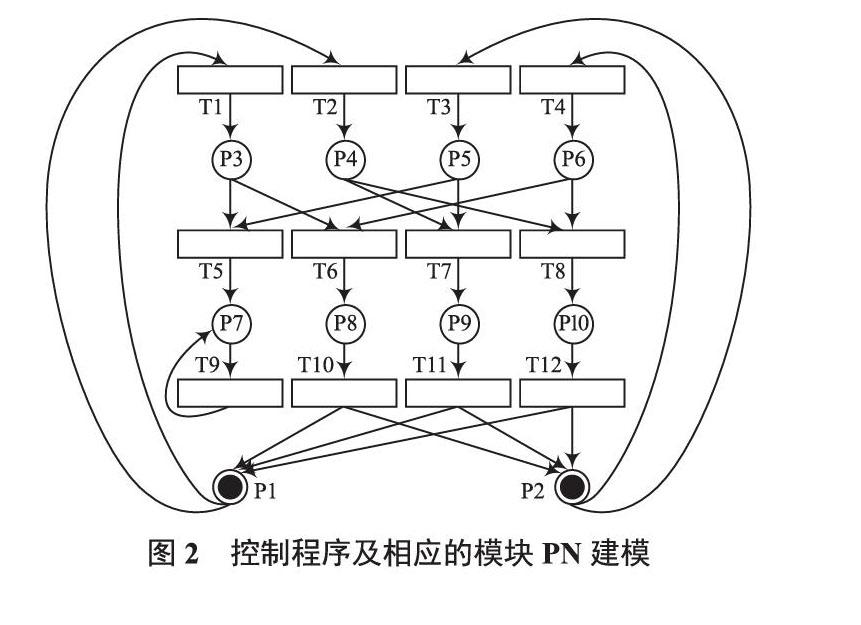
第1.2节中控制程序主要包含传感器采集转换模块、数据分析处理模块以及运行控制模块。本文以小车正常进入轨道为初始条件。小车控制程序的PN模型的库所及变迁设定如下:
P1:左传感器采集信息;P2:右传感器采集信息;P3:左传感器接收左转信息;P4:左传感器未接收左转信息;P5:右传感器接收右转信息;P6:右传感器未接收右转信息;P7:小车停止运行;P8:小车左转;P9:小车右转;P10:小车直行。
T1:发送左转信息;T2:发送无需左转信息;T3:发送右转信息;T4:发送无需右转信息;T5:发送运行状态错误信息;T6:发送左转信号;T7:发送右转信号;T8:发送直行信号;T9:发送错误警告信号;T10:发送直行处理完毕信号;T11:发送右转处理完毕信号;T12:发送左转处理完毕信号。
控制程序及相应的模块PN建模如图2所示。
3 控制程序Petri网模型特性验证
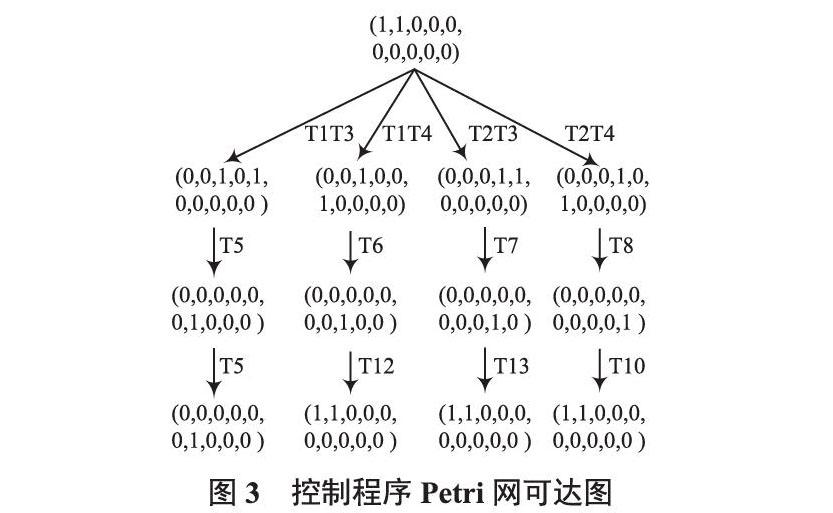
本文采用可达图分析图2的Petri网模型的相应特性。在小车循迹过程中,主要控制逻辑由于设计问题可能出现死锁、系统稳定性差等问题,因此对模型设计的相应特性的检查可以避免在设计过程中发生相应的错误设计。图2的Petri网模型的可达图如图3所示。
依据可达图,控制程序的基本性能分析如下:
(1)图3中所有节点上的标记均为0或1时,此时PN是有界,证明本模型是安全的,是可以实现的;
(2)图3中所有节点都存在有向路径,但不包含全部变迁,所以系统不是活的,系统中存在死锁,如在小车进入出错处理状态时会停车等待处理;
(3)图3中从任何节点到根节点都存在有向路径,代表PN是可逆,反映系统具有可恢复性。
4 结 语
本文对电磁循迹小车的主要控制程序进行了设计描述,采用Petri网对控制程序进行了建模,并采用可达图对模型进行了进一步的分析。结果表明,利用Petri网对电磁循迹小车的控制程序建模,可以消除程序的死锁等特性,保证了程序设计的正确性。
参 考 文 献
[1]高凤强,董坤煌,周牡丹,等.基于电感数字变换传感器的智能小车自动循迹系统[J].工程设计学报,2018,25(2):216-222.
[2]陈浩,田会峰,周瑜,等.一种自动化医疗垃圾收集系统设计[J].自动化技术与应用,2017,36(11):89-92.
[3]范淇元,覃羡烘,黄文妹.基于模块化控制的多功能智能搬运小车的设计[J].自动化与仪表,2018,33(11):47-51.
[4]杜青,乔延华,韩淼,等.基于金属检测的智能循迹小车设计[J].现代电子技术,2018,41(17):119-122.
[5]黄健,董三锋,王利平.基于LDC1000自动循迹智能小车设计[J].微特电机,2017,45(6):62-64.
[6]曹建平,雷丹,郭磊.基于LDC1000电感数字传感器的自动循迹智能小车控制系统设计[J].自动化技术与应用,2017,36(12):13-17.
[7]郑金来,张猛,熊昌秀,等.基于Petri网模型的自动线流程设计与分析[J].组合机床与自动化加工技术,2018(1):60-63.
[8]董健,戴胜华.基于CPN的列控系统等级转换建模与分析[J].计算机工程与应用,2018,54(2):208-213.
[9]梁昌勇,徐彬,俞家文,等.基于RFID的汽车总装物料配送过程的Petri网建模与仿真[J].机械设计与制造,2009(9):203-205.
[10]都雪静,王真真.基于Petri网的汽车总装线生产物流优化[J].物流技术,2017,36(9):136-140.