一种分布式多无人机协同定距盘旋跟踪制导律
2019-11-06冯运铎吴炎烜曹昊哲
冯运铎,吴炎烜,曹昊哲
(北京理工大学 机电学院, 北京 100081)
0 引言
近些年来,无人机发展迅速,其隐蔽性好、生命力强、造价低廉等特点以及对地面和空中目标的定距追踪能力,使其在侦察监视、搜索救护等领域有着广泛应用[1-2]。不同于旋翼无人机,固定翼无人机需要维持一定的巡航速度,因此当跟踪的目标速度较低时,固定翼无人机通常采用定距盘旋的方式跟踪目标。相比于携带探测设备能力有限的单架无人机,多无人机组成编队对目标进行协同包围追踪具有以下优势:可以扩大对目标的探测感知范围,避免因视线被阻挡造成的目标丢失等情况;编队包围目标,可以从不同方位获取目标信息,提高了对目标状态的估计精度。
根据无人机定距盘旋跟踪制导律所利用的相对信息不同,将制导策略大致分为3类:基于视线角与视线角速率的制导策略[3-5]、基于相对距离与相对距离变化率的制导策略[6-8]和基于相对距离与视线角的制导策略[9-10]。其中基于视线角与视线角速率的制导策略在多无人机的定距盘旋问题中最为常见,其通过将无人机简化为1阶或2阶积分器,将视线角信息转化为由无人机指向目标的向量,从而把多无人机系统的稳定性问题转化为线性代数问题进行分析,利用多无人机系统的状态方程结合拉普拉斯矩阵的性质对问题进行求解。例如Boccia等[11]仅利用角度信息实现了多无人机对目标的协同定距盘旋。且这种方法与分析多旋翼无人机系统的方法类似[12-15],例如文献[12]中针对具有切换拓扑的旋翼无人机时变编队跟踪控制问题,基于2阶积分器提出了基于邻近无人机信息的编队跟踪协议以及相应的系统稳定充分必要条件,利用李雅普诺夫第2法证明系统稳定性条件,并通过实验验证了协议的有效性,然而这种简化模型并不符合固定翼无人机通过横向滚转改变飞行轨迹的运动特性。与之相比,基于相对距离与相对距离变化率和基于相对距离与视线角的两种制导策略中通常将固定翼无人机简化为Unicycle模型[16-18],更贴合实际。但是与此同时在无人机和目标的相对运动方程中引入了三角函数而使其变为非线性方程,增加了系统稳定性证明的难度,因此一些文献仅给出基于平衡点的线性系统稳定性证明[19-20]。
Leader-Follower法是常用的多无人机编队结构[21-22],作为Follower的无人机以Leader为中心节点构成编队,然而作为Leader的无人机损坏会导致整个编队解体。相比之下,分布式编队结构具有以下优点[23]:无人机个体间的地位相同,即使某架损坏也不会影响编队,提高了编队网络鲁棒性;当有新的无人机个体加入编队时,由于只与其邻近个体联系,不会过度影响整体编队网络,编队可扩展性更好;降低了对无人机之间通信网络带宽的要求。
综上所述可知多固定翼无人机协同定距盘旋追踪目标的难点在于:1)如何基于符合固定翼无人机运动特性的Unicycle模型而非2阶积分器设计协同追踪制导律,使其具有实际的应用价值,并证明多无人机系统的稳定性;2)如何采用分布式而非Leader-Follower的编队结构,使多架无人机定距盘旋跟踪目标的同时组成具有较强鲁棒性的编队,当编队中无人机损坏时其余无人机能够保持队形,当有新无人机加入时能够形成新的编队。
本文采用基于相对距离与视线角的制导策略,提出了一种分布式多无人机协同定距盘旋追踪低速目标的制导方法。首先以Unicycle模型为基础,考虑固定翼无人机的横向运动特性,设计了一种针对静止目标的分布式协同定距盘旋制导律,使多架无人机在绕静止目标盘旋的同时以一定的队形包围目标,并给出系统稳定性证明;然后将该制导律推广至对匀速运动和变速运动目标的跟踪制导;最后通过半实物仿真,验证了本文设计制导律的有效性。
1 固定翼无人机定距跟踪问题描述
无人机飞行控制系统由内回路(稳定回路)和外回路(制导回路)组成,且本文假设内回路已经设计完成,能够很好地响应外回路制导指令。固定翼无人机通常将内、外回路控制系统分解为垂直平面和水平平面两个通道,在垂直平面通过升降舵和推力系统调整无人机的飞行高度和速度,在水平平面通过副翼与方向舵控制无人机的水平航迹。在实际应用中,当处于平飞状态的无人机速度或者滚转角变化时,无人机的飞行高度会受到影响,但是在速度和滚转角变化的同时,及时调整升降舵能够使其飞行高度的变化较小,此时可以近似地认为无人机始终在同一高度飞行,因此本文中仅考虑多无人机在水平平面的编队问题。在不考虑无人机垂直方向上的运动和气动性能、飞行状况等因素,即所有无人机保持相同高度飞行的情况下,考虑到固定翼无人机通过滚转运动改变速度方向的特性,对固定翼无人机建立运动模型:
(1)
式中:xi、yi、ψi、vi分别为无人机i的二维平面坐标、偏航角和速度(如未特殊说明,本文中的速度皆指速度大小),i=1,2,3,…,n,n为无人机的数量;ui和wi为无人机i的控制输入。假设目标与无人机具有相同的运动模型,且xt、yt、ψt、vt为分别为目标的坐标、偏航角和速度,ut和wt为目标的输入。
(2)

图1 多无人机定距跟踪示意图Fig.1 Schematic diagram of tracking the targets by multi-UAVs
将无人机i和目标之间的相对运动方程写为极坐标形式:
(3)


(4)
2 静止目标的协同定距盘旋算法
假设目标处于静止状态,即vt=0 m/s、ut=0 rad/s,则(3)式简化为
(5)
考虑到实际情况下,固定翼无人机的内回路通常将纵向和横向平面分开考虑,且由(5)式可知其速度方程为1阶积分器,则在(6)式的输入作用下,无人机的速度会收敛至无人机的期望速度vc,其中kv为无人机速度通道的控制增益,由于kv不仅决定无人机的速度变化率,同时也影响速度通道的收敛速度,因此kv的取值需综合考虑两方面因素。
wi=kv(vc-vi).
(6)
在速度控制器的基础上提出分布式多无人机定距盘旋制导律:
(7)

(8)
输入ui代入(5)式,可得无人机i的视线角状态方程为
(9)

证明:
(10)
式中:Ln×n=[lij]为拉普拉斯矩阵,其形式见(11)式,由文献[24-25]可知其特征值为λL≥0:
(11)
作如下线性变换:y=χ-Kχc,则

其中K为n阶矩阵,I为n阶单位矩阵,求解矩阵(αL+βI)的特征值λ:
由于α和β都是正实数且λL≥0,则类比拉普拉斯矩阵L的特征方程可得矩阵(αL+βI)的特征值λ:
λ=αλL+β>0.


(12)
因为-(αL+βI)的特征值均小于0,所以系统最终会收敛至y→0即χ→Kχc,所有无人机的视线角最终会收敛至定值Kχc,即所有无人机期望视线角的加权和。
证明:
(13)

(14)
式中:vc为无人机的期望速度。


令整个多无人机系统的能量函数H为
(15)
将其对时间求导,得
(16)



(17)

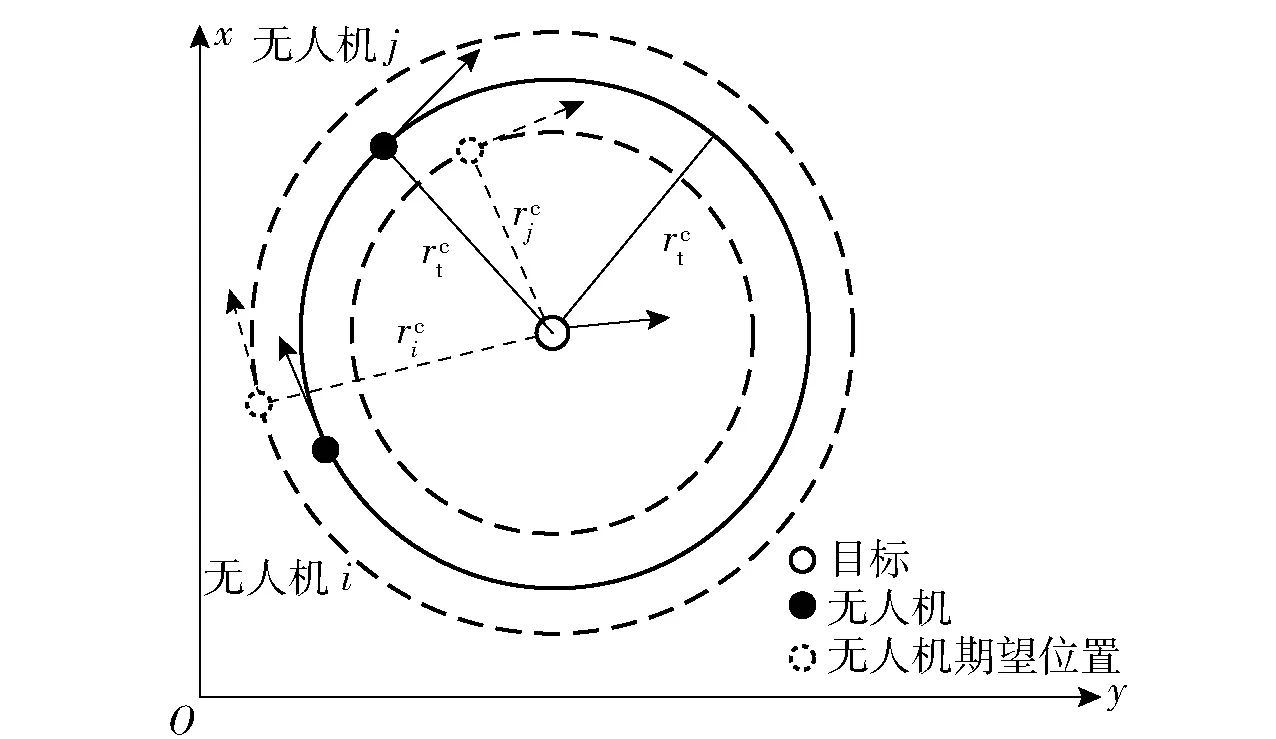
图2 多无人机之间距离控制示意图Fig.2 Control of distance between UAVs
3 运动目标的协同定距盘旋算法
当目标静止时,无人机以相同的速度飞行即可完成协同定距盘旋。当目标以速度vt运动时,相同速度的无人机虽然可以定距追踪目标,但由于无人机相对目标的速度大小时刻变化,无人机之间的距离无法收敛至定值,多无人机无法形成编队。针对此类情况,将无人机的速度矢量进行如下分解:
(18)

(19)


图3 无人机速度分解示意图Fig.3 Decomposition diagram of UAV speed
由于每架无人机的期望速度不再相同,将(6)式改写为
(20)
在(20)式的输入作用下,所有无人机相对目标的速度大小收敛至相同值vc,则将无人机相对运动目标的运动方程改写为
(21)

(22)

(23)
若目标为变速运动状态,此时目标对时间的导数不再为0,则将(18)式写成标量形式:
(24)

(25)
上述从静止目标向运动目标的推导过程表明:对于运动目标,制导律的有效应用需要引入额外信息,当目标匀速运动时为目标的速度信息,当目标变速运动时为目标的速度和加速度信息。本文中假设这些运动信息皆是已知的,而在实际工程中难以直接测量目标的速度和加速度,因此可以通过对目标连续位置变化的分析间接得到其速度和加速度信息。例如基于光学成像的光流法能够有效地获得目标的位置和速度信息[26],基于机器学习的视觉识别能够在先验知识的基础上对目标速度和加速度作出预测[27]。但是这种间接方法通常具有计算量大的缺点,对机载计算机的计算能力具有较高要求。
4 仿真验证
为验证前述算法的有效性,本节构建如图4所示的仿真框架,搭建基于飞行控制器、模拟飞行软件X-Plane和仿真软件MATLAB/Simulink的半实物仿真平台,分别针对静止、匀速和变速目标的协同跟踪定距盘旋制导律进行仿真验证。其中飞行控制器作为内回路控制无人机的飞行姿态,X-Plane软件用来进行固定翼无人机的动力学仿真,模拟无人机在现实中的飞行,而外回路制导模块和通信模块则在Simulink软件下搭建完成。

图4 仿真框架示意图Fig.4 Simulation block diagram

假设无人机数量n=3,其初始时刻的位置、速度大小和航向角分别为UAV1={1 000 m,-900 m,40 m/s,π/4 rad}、UAV2={600 m,300 m,30 m/s,5π/4 rad}、UAV3={200 m,-200 m,20 m/s,3π/2 rad}。
综上所得参数设置为
如图5所示为半实物仿真中X-Plane软件的显示界面。为表现更直观,以下只给出了二维平面的轨迹示意图。

图5 X-Plane软件的三维仿真图Fig.5 3D simulation of X-Plane software
4.1 静止目标
为与前述无人机初始状态数据构型相同,假设目标的初始状态为TARGETs={500 m,353 m,0 m/s,0 rad}。
设无人机的期望速度vc=30 m/s,如图6、图7和图8所示分别为3架无人机协同绕静止目标定距盘旋的轨迹图、距离变化曲线图和相对速度变化示意图,可以看出初始时刻无人机3距离目标较近,无人机1和无人机2距离目标较远。在150 s以内,无人机和目标的距离和视线角以及无人机之间的距离最终收敛至预设值,3架无人机以正三角形队形包围目标,且无人机的速度在较短的时间内收敛至期望值。

图6 跟踪静止目标轨迹图Fig.6 Tracking trajectory for stationary target

图7 距离变化示意图(静止目标)Fig.7 Distances among UAVs (stationary target)

图8 相对速度变化示意图(静止目标)Fig.8 Relative speeds of UAVs (stationary target)
4.2 匀速运动目标
假设目标的初始状态为TARGETc={500 m,353 m,10 m/s,0 rad}。
设无人机相对目标运动的期望速度vc=30 m/s,如图9、图10和图11所示为3架无人机协同追踪匀速运动目标的轨迹图、距离变化曲线图和相对速度变化示意图,可以看出3架无人机仍能以预定队形定距追踪目标,即无人机和目标之间的距离以及无人机之间的距离最终稳定在预设值。虽然无人机相对目标的速度仍然收敛至期望值,但是与目标静止时相比,相对速度收敛得较慢。

图9 跟踪匀速运动目标轨迹Fig.9 Tracking trajectory for target with constant speed

图10 距离变化示意图(匀速目标)Fig.10 Distances among UAVs (target with constant speed)

图11 速度变化示意图(匀速目标)Fig.11 Relative speeds of UAVs (target with constant speed)
4.3 变速运动目标
假设目标的初始状态为TARGETt={500 m,353 m,5 m/s,0 rad}。
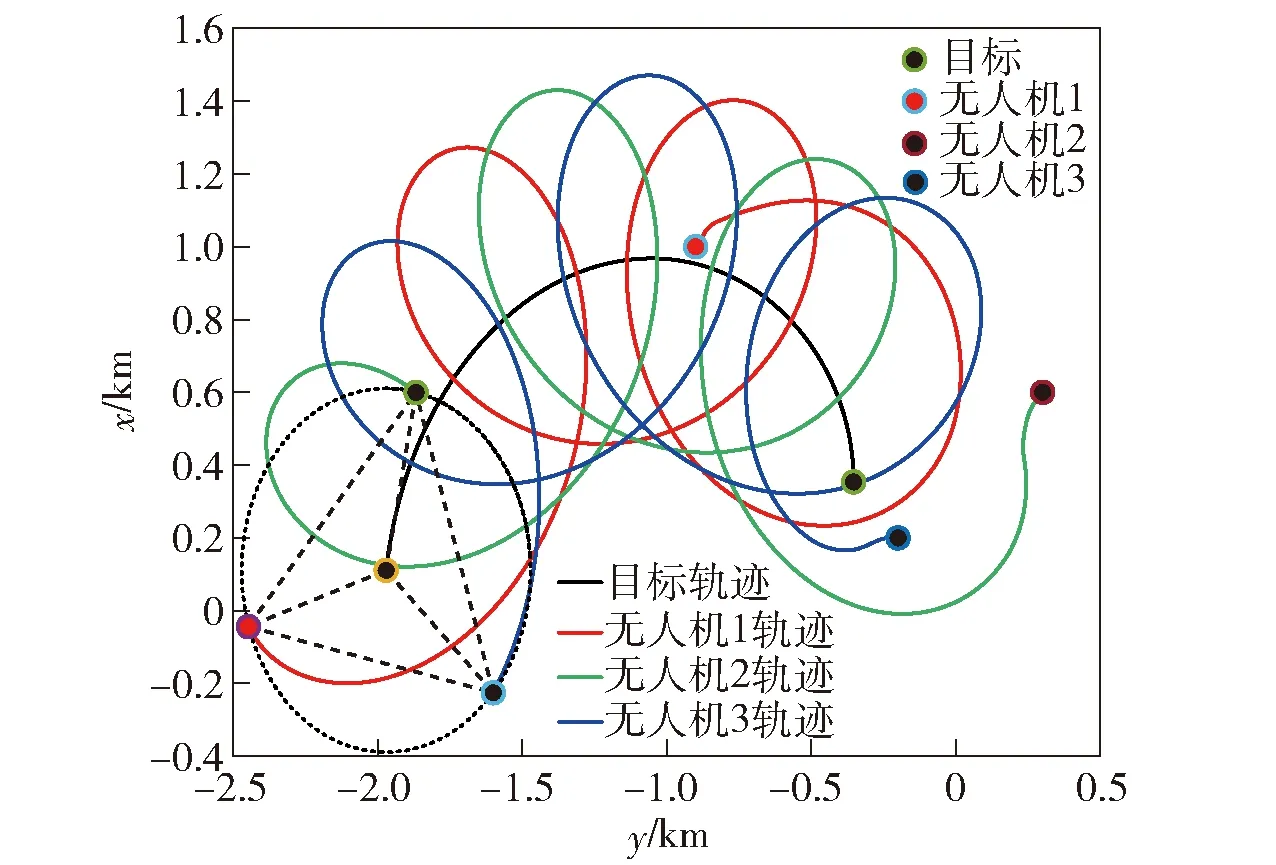
图12 跟踪变速运动目标轨迹图Fig.12 Tracking trajectories for target with variable speed
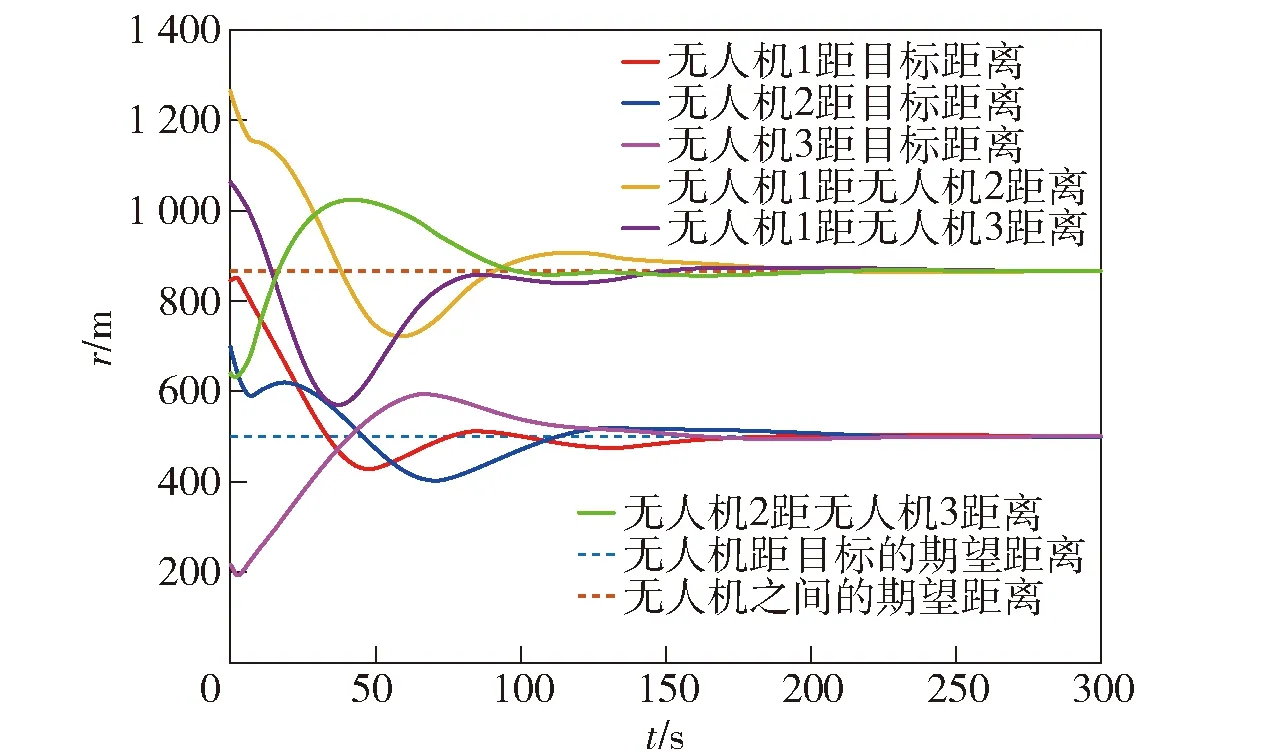
图13 距离变化示意图(变速目标)Fig.13 Distances among UAVs (target with variable speed)

图14 速度变化示意图(变速目标)Fig.14 Relative velocities of UAVs (target with variable speed)
4.4 编队网络的鲁棒性
本文所提分布式协同跟踪制导律较之Leader-Follower方法,最大优势在于提高了编队网络的鲁棒性,如图15的仿真结果所示,在3架无人机形成编队跟踪目标的情况下,无人机3在t=200 s时由于不确定干扰因素脱离原有飞行轨道,飞离无人机1和无人机2的通信范围。此种情况下,本文所提制导律仍然保证了无人机1和无人机2维持编队的同时继续定距盘旋追踪目标。而在t=270 s时无人机4作为补充的新无人机出现在无人机1和无人机2的通信范围之内时,在制导律的作用下3架无人机重新形成编队定距跟踪目标,且无人机4的加入并未对已有的无人机1和无人机2形成的已有编队造成显著影响。

图15 编队网络鲁棒性示意图Fig.15 Robustness of UAV formation
5 结论
本文提出了一种分布式多固定翼无人机协同定距盘旋跟踪静止及低速运动目标的新型制导方法。以相对运动方程的极坐标形式为基础,结合反馈线性化、李雅普诺夫第2法和分布式一致性控制的基本性质,对所提出制导律的稳定性进行了证明,并通过半实物仿真验证了所提制导方法的有效性。得到如下主要结论:
1) 根据固定翼无人机的运动特性,基于Unicycle模型设计了多无人机协同跟踪目标的制导律,实现了无人机编队对目标的定距盘旋跟踪,具有实际的应用价值。
2)相比于传统的Leader-Follower编队结构,分布式编队结构提高了多无人机系统的鲁棒性,在部分无人机脱离的情况下仍然可以维持原有编队,在新无人机加入时可以形成新的编队。
3)搭建半实物仿真平台,验证了本文提出的新型分布式多无人机协同跟踪制导律可以有效跟踪不同运动状态的目标,具有实际工程应用价值。