基于变电站巡检机器人和综合管控平台的断路器状态识别方法
2019-11-05黄慰叶强杨超超田亮赵浚宋丙顺
黄慰 叶强 杨超超 田亮 赵浚 宋丙顺

【摘 要】为了解决变电站智能巡检机器人不能对高压断路器开关分合状态图像实时采集、实时处理分析,影响变电站巡检工作效率、效益和质量以及电力企业安全运营的问题,提出了一种能识别断路器开关分合状态的识别算法。该算法结构简单,运行速度快,能及时正确地进行故障诊断、准确性高。在综合管控平台下可以提升变电站智能巡检机器人的巡检工作效率和质量。
【关键词】变电站巡检机器人;综合管控平台;断路器;分合状态;模版匹配
中图分类号: TP242 文献标识码: A文章编号: 2095-2457(2019)28-0095-002
DOI:10.19694/j.cnki.issn2095-2457.2019.28.039
0 引言
变电站是各级电网的核心枢纽,对站内设备例行检查是保证电网安全运行的关键技术手段[1]。目前,我国电力变电站设备巡检多采用人工巡检方式[2]。即变电站工作人员进入设备区,进行设备巡视。但是人工巡检主要靠的是作业人员的主观的感官定性判断分析,需要工作人员有丰富的工作经验和较高的业务水平,并且这种模式劳动强度大,检测质量分散,受恶劣天气干扰大,很难做到数据的实时输入管理信息系统,无法满足现在高速发展的电力系统。
同时,变电站是个高危场所,在恶劣天气下,设备的巡检对工作人员来说存在较大的安全隐患[3]。随着机器人技术的快速发展,将机器人技术与电力应用相结合,基于机器人移动平台携带检测设备代替人工进行设备巡检成为了可能。
高壓断路器开关是发电厂、变电站及电力系统中最重要的控制和保护设备,对断路器设备的操作直接关系到变电站乃至整个电网的安全、稳定运行。目前,国内变电站开关设备安全管理,大多采用24小时人工值班巡查工作制度,一般为3至7人,值守质量较低[4],而且随着电网规模的不断增大,因开关拒动或者误动的故障事件排查难度日益增大,而且大多数时候因开关故障所带来的损失很大。而采用“无人值守”[5]的设计理念,可以加强变电站开关设备的安全监管,改进拓展监视功能、提高监管效能。
本文针对现有技术存在的变电站智能巡检机器人不能对高压断路器开关分合状态图像实时采集、实时处理分析,影响变电站巡检工作效率、效益和质量以及电力企业安全运营的问题。提出了一种能识别断路器开关分合状态的识别算法。该算法结构简单,能及时正确地进行故障诊断、准确性高。在综合管控平台的配合下,提升了机器人的巡检工作效率和质量。
1 图像去噪
图像在形成、传输过程中,常因外界噪声的干扰而导致质量退化。质量退化后,会严重影响后续的识别结果,降低了识别率。因此,噪声检测是比较关键的一步,它为图像中像素点的正确分类提供基础。目前,图像噪声检测的方法较多,可以采取各种滤波方式对图像进行去噪处理。其中,中值滤波和高斯滤波是滤波去噪常用的两种方法。
1.1 中值滤波
中值滤波是一种非线性平滑技术,它将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值[6]。就是用一个奇数点的移动窗口(中值窗),将窗口中心点的值用窗口内各点按其数值大小排序后中间的那个数(即中值)代替.中值滤波是一种优化的保持边界与滤除高频噪声干扰的滤波方法,尤其对处理突变尖峰之类的脉冲噪声非常有效。并且在滤除噪声的同时图像不会被模糊。二维中值滤波的窗口形状和尺寸设计对滤波效果影响较大,不同的图像内容和应用要求,往往采用不同形状和尺寸以达到满意的滤波效果。
1.2 高斯滤波
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程[7]。通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
高斯滤波器脉冲响应函数为:
从图中可以看出,虽然中值滤波提高了图像的对比度,但是它破坏了图像的轮廓,尤其是字符区域。而高斯滤波保持的轮廓性比较完整,完整的轮廓在对目标检测的特征比对时会表现出更好的优势,因此本文选择高斯滤波进行去噪。
2 架构设计及其工作原理
基于模板匹配的能识别断路器开关分合状态的变电站智能巡检机器人,包括机器人本体、数据处理系统。机器人本体上安装有云台,云台上搭建与变电站断路器开关相对应的图像采集器,图像采集器与解码器相连,解码器与数据初级处理器相连,而数据初级处理器通过数据线与数据处理系统相连,数据处理系统通过无线方式与综合管控平台相连。
其中,图像采集器为可见光摄像头,数据初级处理器为数据处理芯片,数据处理系统为工控机,或单片机,或PLC。
对设备进行智能巡检工作时,通过可见光摄像头采集变电站断路器开关设备“分”状态与“合”状态的标志字可见光图像,标定出图像中开关设备显示“分”或“合”字体的区域,并用图像处理的方法生成开关分离状态和开关合并状态的模板,将此模板存储于数据处理芯片。当机器人接收到下达的巡检任务后,机器人按照预先规划的线路,由行进驱动系统及导航系统驱动机器人向变电站设备行进。到达预定位置后、在预置位停驻,机器人对断路器开关设备实时采集可见光图像,并将图像通过解码器解码保存在数据处理芯片中。数据处理系统对机器人实时采集到的可见光图像进行分析,首先实现图像中断路器设备区域的精确定位,然后与分合状态标志字图像模板分别进行匹配,以相似度高的模板作为匹配结果,从而识别出标志字为“分”或是“合”。
3 算法设计及其分析
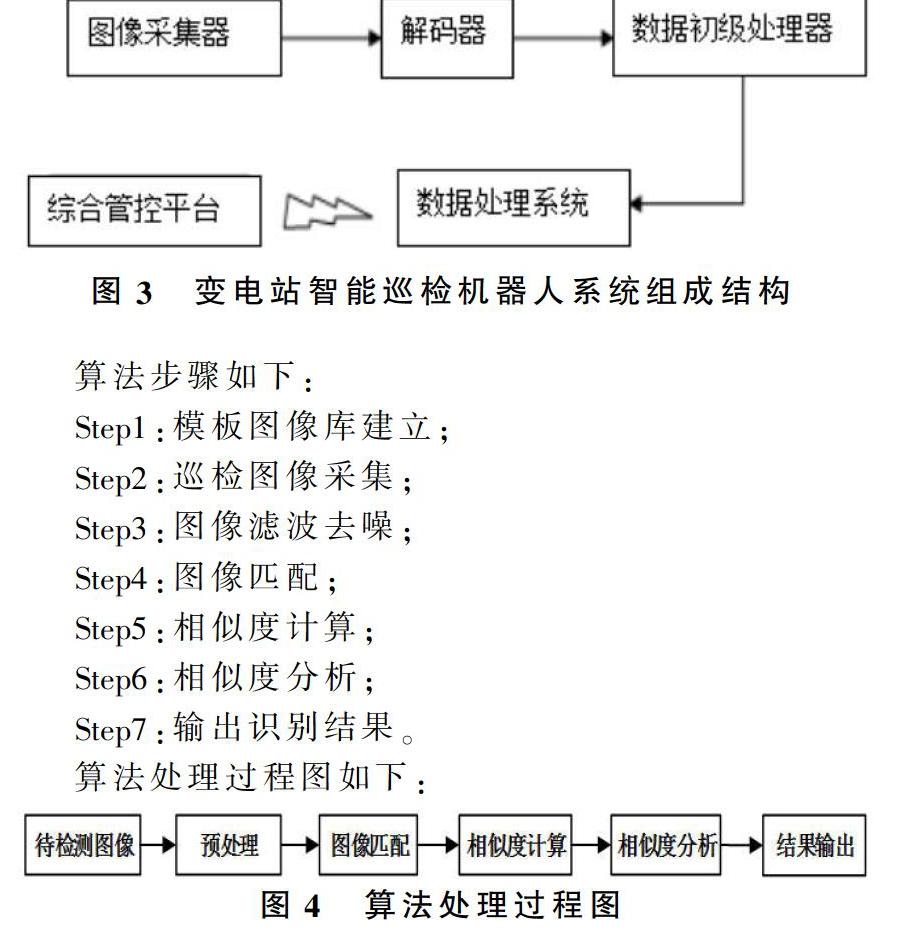
正如以上所述,巡检得到的待检测断路器开关图像和模板图像进行匹配,将相似度高的模板结果作为识别结果输出,图3为变电站智能巡检机器人系统组成结构。
算法步骤如下:
Step1:模板图像库建立;
Step2:巡检图像采集;
Step3:图像滤波去噪;
Step4:图像匹配;
Step5:相似度计算;
Step6:相似度分析;
Step7:输出识别结果。
算法处理过程图如下:
4 结论
本文能够有效的在巡检过程中实时采集图像并实时识别高压断路器的开关状态,实现了机器人巡检工作的及时性、有效性和可靠性,进一步促进了电力巡检机器人的智能化。并且,本文算法能代替运行人员实现断路器分合状态的识别,减轻运行人员的劳动强度,缩短操作时间,消除现场人员的主观因素的影响。保障了工作人员在高危环境下的人身安全,满足国家电网的现场需求。
【参考文献】
[1]杨旭东,黄玉柱,李继刚,等.变电站巡检机器人研究现状综述[J].山东电力技术,2015,24(204):30-34.
[2]宋晓明.变电站智能巡检机器人关键技术研究[D].长沙理工大学,2013,2-9.
[3]石易,袁新让,史超,等.变电站智能巡检机器人关键技术研究[J].电力系统装备,2019,11:153-154.
[4]孙泽宇,李蒙,杨涛.矿区网络监控系统防雷机制分析与设计[J].煤矿安全,2011(8):98-91.
[5]王丽敏,关延伟,刘新宇.基于图像处理的无人值守变电站目标自动跟踪系统[J].华北水利水电学院学报,2010,31(1):67-69.
[6]梁利利.基于小波变换与中值滤波的炉膛火焰图像去噪方法研究[J].工业加热,2019,48(2):21-24.
[7]李健,丁小奇,陈光,等.基于改进高斯滤波算法的叶片图像去噪方法[J].南方农业学报,2019,50(6):1385-1391.
