基于点云数据的建筑特征线自动提取
2019-11-02崔云健曹媛媛
崔云健 曹媛媛 文 言 郑 曦
(1.江苏海洋大学测绘与海洋信息学院,江苏 连云港 222005)(2.重庆交通大学土木学院,重庆 400074;3.中国医科大学药学院,沈阳 110001)
0 引言
三维激光扫描技术被称为“实景复制技术”,其能快速获得原始的测绘数据,并完整、高精度地重建实体[1]。随着技术的不断成熟,海量点云数据自动化处理的出现为建筑物三维建模提供了新思路,为快速构建高精度三维模型提供了方便。因此,针对如何快速提取建筑物特征线,本文以苏州测绘地理信息大楼为例,采用三维激光扫描仪、CloudCompare 软件,结合“内凸包算法”,对点云数据进行特征线提取,并以此为基础构建了高精度三维模型,取实验结果表明,该方法提高了建模的效率,提高了精度,得了较好的效果。
1 传统建筑物三维建模方式
目前,传统的三维建模方式分为以下几种方法:1.利用传统测绘手段,获取房屋的四周边角特征点的坐标,在软件中连接形成矩形作为房屋的底部,将底部上拉赋予一个高程,这样一个简单的房屋就成型了。这种方法数据获取困难,纯手工建模效率不高并且所获得的模型精度不高,还原程度低;2.根据房屋详细的结构图,在CAD、3D max 等软件中进行三维模型的构建。这种方法需要完整详细的设计图,周期长,对建模人员的技术要求较高并且获得的是点线面结构的模型,包含建筑信息较少。总结来说传统的建模方式数据获取困难,纯手动建模效率低,所获得的模型较为简单,包含建筑信息少,很难适应如今设计和施工的要求。
2 自动提取方法研究
2.1 研究区概况
本文以江苏省苏州市测绘地理信息大楼为实验区。实验区位于苏州工业园区,共分为南北两栋建筑,共9 层。建筑外部主体是玻璃幕墙,绿植环绕,部分绿植遮挡了建筑,;而建筑内部结构复杂,有较多的玻璃材质的门窗,这些对数据获取造成了不小的麻烦,很容易出现点云缺失的情况。综合评判,选取的实验区具有代表性,有利于研究建筑物的特征线自动提取。
2.2 技术流程
实验采用Trimble TX8 站式三维激光扫描仪与Leica 背包式三维激光扫描仪相结合的方式获取点云。首先分别采用两种仪器获取点云数据,在配套的数据处理软件中进行配准,分别得到建筑物内外部点云;其次,通过融合算法将站式数据与背包的数据进行融合配准;最后通过降噪、抽稀、重采样的方式获得完整的可利用的点云数据。本次实验点云数据精度达到5cm,满足三维建模精度要求。
本次自动提取的技术流程如图1所示

图1 技术流程
2.3 结果
最终实验结果如下图2~图5所示。
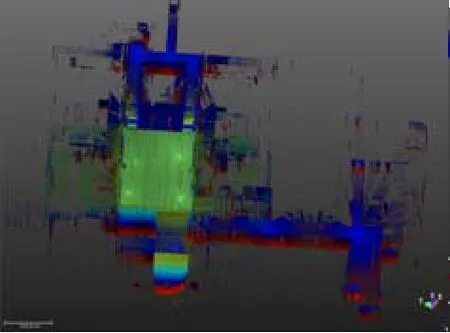
图2 点云处理后结果
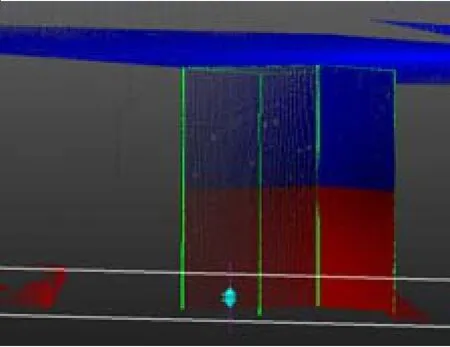
图3 部分自动提取结果
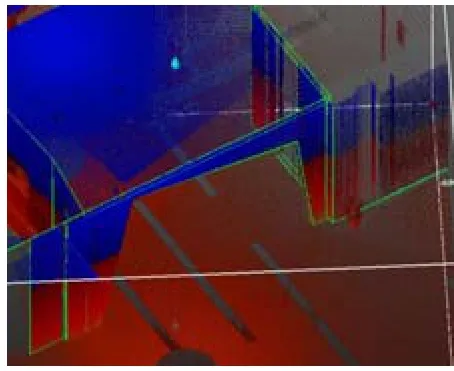
图4 部分提取结果
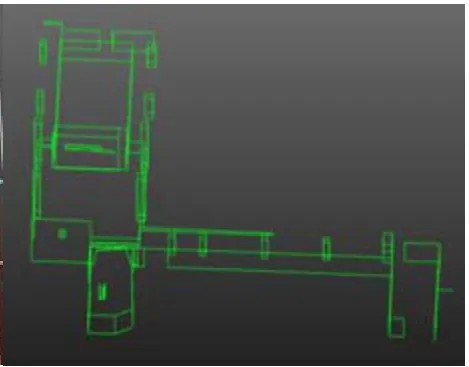
图5 最终提取结果
3 结束语
本文通过点云数据,对建筑物的内外部特征线进行了自动提取,采用“凸包算法”结合CloudCompare 软件进行三维可视化,初步提取出了建筑物特征线。未来如何能更加准确的提取特征线,以及如何处理因玻璃材质造成的点云缺失的状况,是需要研究的地方。
