基于LabVIEW的煤炭运输船舶计重吃水值自动识别系统研究
2019-10-30滕灵芝沙宝银
滕灵芝 沙宝银
(1.煤炭科学技术研究院有限公司检测分院,北京市朝阳区,100013;2.煤炭资源高效开采与环境保护国家重点实验室,北京市朝阳区,100013)
1 引言
煤炭生产和消费的地域分布决定了我国煤炭运输长期存在西煤东送和北煤南送的格局[1]。我国北方较大的煤炭装船港有秦皇岛港、黄骅港、唐山港曹妃甸港区,目前港区载煤船采用水尺计重的方式来确定海运煤炭的重量,计重结果可作为商品货物计算运费、交接结算、处理索赔和通关计税等的依据[2]。其原理是通过对载煤船测定装、卸货物前后的平均吃水数据计算船舶排水量变化,再结合船上淡水、压舱水以及燃油等数据计算出货物重量。以载煤船平均运载量6万t计算,水尺误差1 cm将产生约80 t的计重误差。由此可见,煤炭运输船舶吃水深度至关重要,其精度直接影响货物重量。
现今煤炭运输船舶水尺计重行业最普遍的测定方法是船舶吃水人工观测法[3],通常是专业水尺计重人员通过人工观测直接进行读数。这种人工观测水尺方法受主观因素影响较大,容易导致船方、港方以及第三方之间对水尺读数产生争执,引发纠纷。针对人工观测吃水法的弊端,近年来各行业在水尺测量方面做了很多研究工作,包括传 感 器 测 量 法[4-7]和 图 像 识 别 法[8-12]。传 感 器 测量法属于间接测量,硬件装置容易受浪涌情况、电磁干扰等环境因素影响,导致最终结果误差较大;图像识别法利用图像处理技术和机器视觉,直接对水尺视频进行分析,但图像分析结果常常受水尺标记的污损、浪涌情况、水质透明度、船体本身等因素干扰,结果不尽人意。
在借鉴图像识别法基础上,利用Lab VIEW平台的机器视觉功能,设计了一套基于Lab VIEW软件平台的煤炭运输船舶计重吃水值自动识别软件,从而提高水尺识别的准确度,消除人为误差,对提高煤炭运输船舶水尺读数的客观性、公正性、科学性具有重要意义。
2 LabVIEW软件平台分析
Lab VIEW是由美国国家仪器公司(NI)开发的一款适用于多操作系统的基于图形程序的虚拟仪器仪表开发平台[13],是专为测试、测量和控制应用而设计的系统工程软件,其应用范围覆盖了测试测量、嵌入式应用、工业自动化等众多领域。LabVIEW的程序由前面板和程序框图组成。前面板集合了用户输入和显示控件,相当于传统测试仪器的面板;程序框图包含了各种功能函数,每个功能模块均为封装好的子程序。功能模块用连线构成控制流程图,依据连线走向决定程序的执行顺序[14]。
NI Lab VIEW机器视觉开发模块供从事开发Lab VIEW机器视觉和科学图像应用的科学家、工程师和技术人员使用。该软件包括IMAQ视觉功能库和NI Vision Assistant(视觉助理),其中NI Vision Assistant是一个交互式的开发环境,开发人员无需编程,即能快速完成视觉应用系统的模型建立和测试。视觉助理界面包括图像预览区、功能模块区、处理步骤区、处理展示区四大部分。与其它视觉产品不同,视觉助理可自动生成Lab-VIEW程序框图,简化了编程过程,提高了测试效率。Lab VIEW平台为煤炭运输船舶计重吃水值自动识别软件提供了非常适合的软件开发工具。
3 煤炭运输船舶计重吃水值自动识别设计
煤炭运输船舶计重吃水值自动识别系统的设计原理为:将水尺视频进行逐帧处理,获取每帧图像的水线和字符,并基于水线位置、字符坐标等数据计算出当帧的水尺读数,最后通过统计筛选以及聚类算法计算出平均吃水值。船舶计重吃水值自动识别流程如图1所示。
煤炭运输船舶计重吃水值自动识别系统字符识别采用OCR识别和模式匹配的方式,用户根据实际情况选择其中之一进行操作,前者优点是人为干预少、识别速度快,但在字符污损情况下识别率较低;后者优点是字符识别率较高,但增加了人为干预且识别速度较慢。
3.1 基于OCR的水尺识别
基于OCR的水尺识别可以预先通过NI Vision Assistant进行OCR文字识别建模,在处理步骤区调用不同的模块对图像进行处理,并对各个模块调整最佳的参数以实现通用有效的分析结果,达到识别水尺字符和获取字符坐标的目的。NI Vision Assistant建模展示如图2所示。
基于OCR的水尺识别模型依次调用模块为:Geometry(几何形状处理)、ColorPlane Extraction(颜色抽取)、Lookup Table(查找表)、Histogram(直方图)、Threshold(阈值)、Gray Morphology(灰度形态学)、OCR/OCV(字符识别)。这些模块的作用分别为:旋转图像角度、图像转换为灰度图像、改善图像对比度和亮度、获取图像灰度平均值和标准偏差等、灰度图像转换为二值图像、灰度腐蚀操作减少噪点、字符训练并识别。
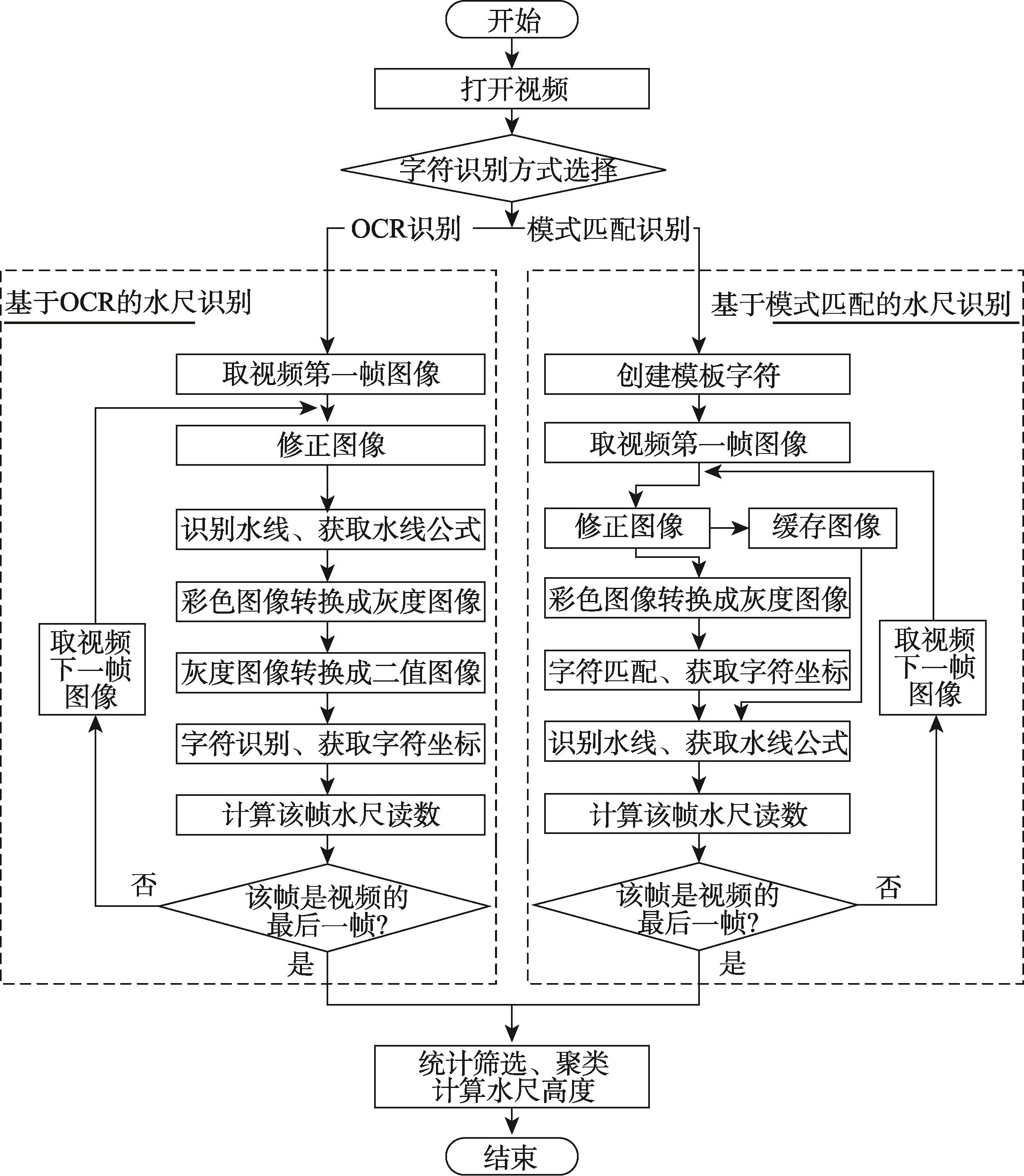
图1 船舶计重吃水值自动识别流程

图2 NI Vision Assistant建模展示
在该模型中,OCR/OCV模块的OCR字符训练功能尤其重要,通过OCR训练形成字符集文件,然后图像字符与字符集文件进行比对获得结果,基于OCR的水尺识别必须事先训练足够数量的字符数据,为后期系统正确识别出字符提供依据。OCR识别训练如图3所示,OCR识别效果如图4所示。
在完成建模后,通过tools菜单中的Create LabVIEW VI功能自动生成LabVIEW程序框图,该程序框图中包含NI Vision Assistant建模时一系列操作的相同功能。在此基础上,对包括水线识别、高度计算等软件功能进行补充完善,最后形成完整的程序。基于OCR的水尺识别过程如图5所示。
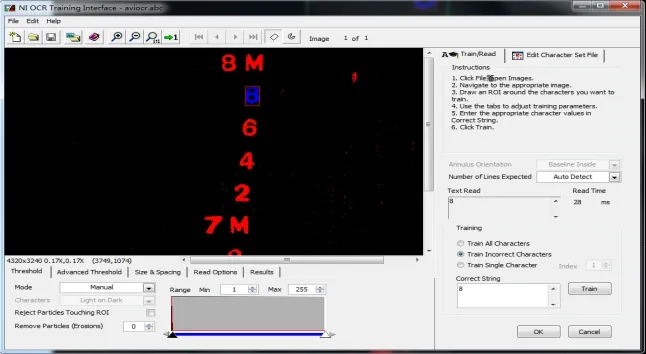
图3 OCR识别训练

图4 OCR识别效果
(1)图像修正:利用IMAQ Rotate VI(旋转子函数),对图像进行角度修正。
(2)水线识别:利用IMAQ Advanced Find Edge VI(高级查找边缘子函数),通过从下往上方向查找图像中沿某条线上的亮度变化点(即水线),查找到水线后,获得水线起点像素坐标(x1,y1)和终点像素坐标(x2,y2),应用线性拟合得出水线计算见式(1):
y=a1x+b1(1)
式中:y——水线y方向像素值,px;
y——水线x方向像素值,px;
a1——水线直线斜率;
b1——水线直线截距,px。
(3)颜色抽取:抽取彩色平面,利用IMAQ ExtractSingleColorPlane VI(抽取彩色平面子函数),将彩色图像转换为灰度图像。
(4)形态处理:对图像进行去噪和滤波,并将灰度图像的灰度平均值和标准偏差之和作为阈值分界点,利用IMAQ Threshold(阈值子函数)将灰度图像转换为二值图像。
(5)字符识别:创建OCR会话并读取字符集文件,利用IMAQ OCR Read Text VI(字符读取子函数)获取包括字符数值、字符位置坐标、字符高度宽度等字符信息。本过程中,部分污损字符和相似字符容易造成错误识别,利用字符M的位置和字符排列规律获得字符真实数值。对多个字符位置坐标(xi,yi)进行线性拟合,得出字符直线计算见式(2):
y=a2x+b2(2)
式中:y——字符y方向像素值,px;
x——字符x方向像素值,px;
a2——字符斜率;
b2——字符直线截距,px。
建立水尺高度hi和像素坐标高度数值yi的对应关系,并进行线性拟合,得出高度计算见式(3):
h=a3y+b3(3)
式中:h——水尺高度值,m;
y——字符y方向像素值,px;
a3——高度直线斜率;
b3——高度直线截距,m。
(6)高度计算:根据式(1)和式(2),得出水线与字符直线的交点像素坐标(xj,yj),将yj代入到式(3),即得该帧图像的实时高度值。
(7)平均高度计算:重复计算剩余帧图像读数,最后对所有数据进行统计筛选计算出平均吃水值。
3.2 基于模式匹配的水尺识别
煤炭运输船舶计重吃水值自动识别系统中的模式匹配用于定位灰度图像中预定模板图像的位置,其不受图像亮度、噪声、偏移等因素的影响。该方法适用于在字符锈蚀污损的情况下的识别,但缺点是增加了人为干预且识别速度较慢。基于模式匹配的水尺识别也可通过NI Vision Assistant进行建模,方法与基于OCR识别描述的建模部分相似。基于模式匹配的水尺识别过程如图6所示。
(1)创建模板:用户创建字符模板,输入模板对应的水尺高度值,保存模板。
(2)修正图像并缓存:对图像进行角度修正并缓存校正后图像,缓存的目的在于字符识别后再进行水线查找,缩小查找区域,避免误识别。
(3)颜色抽取:同OCR识别中的颜色抽取步骤相同。
(4)模式匹配:读取模板字符,利用IMAQ Match Pattern VI(模式匹配子函数)获取模板字符在图像中的包括字符数值、字符位置坐标、字符高度宽度等信息;并基于字符信息得到字符直线公式、高度计算公式,公式获得方法同OCR识别中的方法相同。
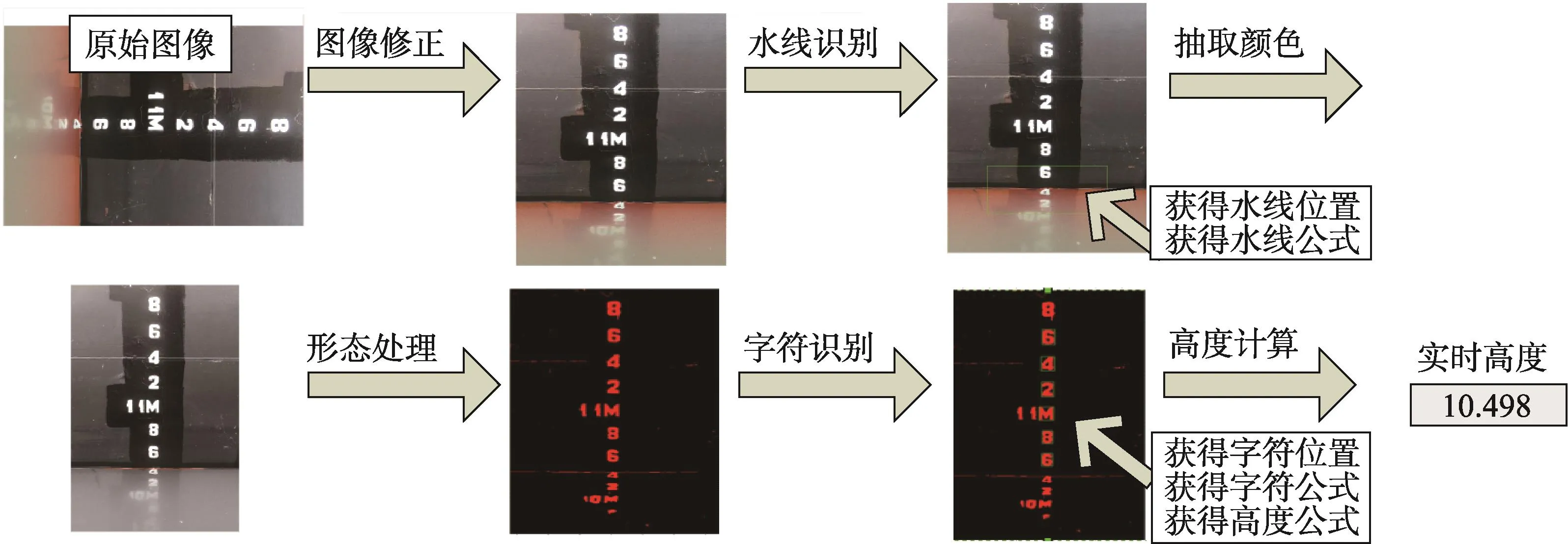
图5 基于OCR的水尺识别过程
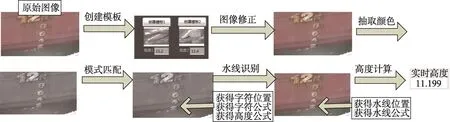
图6 基于模式匹配的水尺识别过程
(5)水线识别:读取步骤(2)中的缓存图像,利用步骤(4)中识别出的最下方字符位置信息,在字符下方区域查找水线,并获取水线公式。
(6)高度计算:同OCR识别中的高度计算步骤相同。
(7)平均高度计算:同OCR识别中的平均高度计算步骤相同。
4 煤炭运输船舶计重吃水值自动识别系统应用
目前,基于Lab VIEW的煤炭运输船舶计重吃水值自动识别系统已经开发完成并投入使用,该系统同时具备OCR和模式匹配功能。为了验证吃水值自动识别系统的准确性及可靠性,2019年4月在河北省沧州市黄骅港港区,对在此靠港的8船次船舶安排了2组工作人员同时进行吃水值比对测量,一组直接人工目测水尺,另一组采集吃水图像后直接用系统分析。在比对过程中,选择对水尺计重影响最大的船舯水尺读数(即中间水尺读数)作为试验对象,船舯位置又分为内档舯和外档舯。人工目测水尺按照《进出口商品质量鉴定规程第2部分:水尺计重》(SN/T 3023.2—2012)的标准分析读数。采用2种方法得到的数据对比结果见表1。
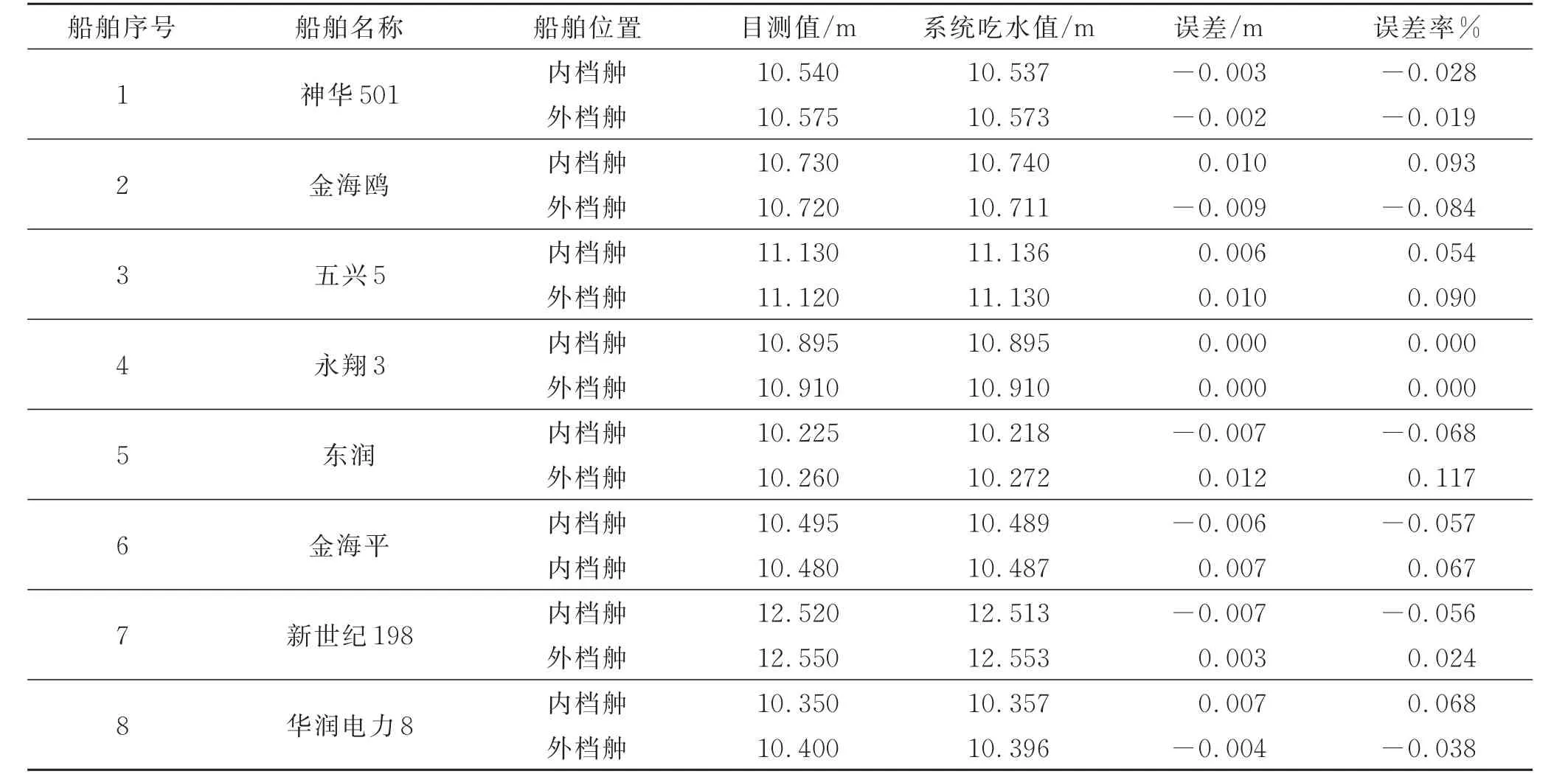
表1 煤炭运输船舶计重吃水值自动识别系统与人工目测方法数据比对
表1中,系统测量水尺值较人工目测方式的误差率见式(4):
E=(F-G)/G (4)
式中:E——误差率,%;
F——软件分析水尺值,m;
G——目测检视水尺值,m。
从表1可以看出,8船次自动识别软件的检视水尺较目测方式误差范围在0.000~0.012 m之间,平均误差率为0.054%,符合水尺计重规程要求的船舶制表的准确度在0.1%以内的要求,解决了煤炭港口运输船舶计重系统吃水人工观测法存在误差大、效率低、纠纷多等问题。
5 结语
基于LabVIEW的煤炭运输船舶计重吃水值自动识别系统实现了复杂情况下数字和水线的识别定位、水尺吃水值的全自动计算,消除了人工观测水尺的人为误差,对于提高船舶水尺读数的客观性、科学性具有重要意义,但识别精度还有进一步提高的空间。随着图像识别技术、人工智能技术的发展,会彻底解决水线的误判断问题,随着识别精度的提高,自动识别会完全替代人工观测,实现船舶吃水快速、科学、公正鉴定。
